| Citation: | LIN J T,CHEN X Z. Sliding mode control of magnetic levitation ball systems based on a high-gain disturbance observer[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(6):1897-1906 (in Chinese) doi: 10.13700/j.bh.1001-5965.2024.0518

|
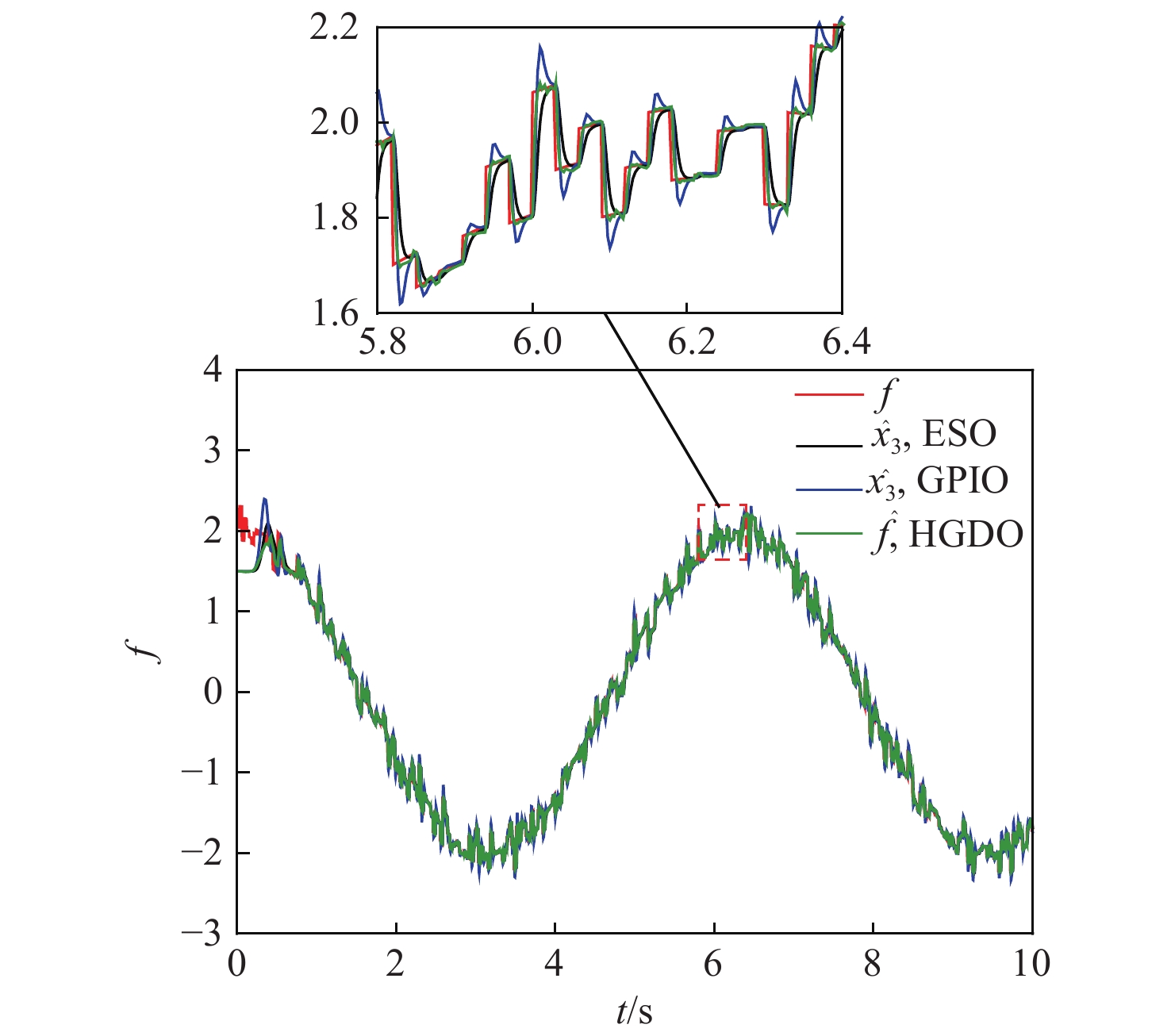
Using a high-gain disturbance observer(HGDO), a self-adaptive nonsingular terminal sliding mode control (ANTSMC) approach is devised to solve the issue of control performance degradation in magnetic levitation ball systems caused by modeling errors and unknown disturbances. First, a model of the maglev ball system is developed and the model is linearized at the equilibrium point. Then, to weaken the chattering of the sliding mode controller and guarantee the finite-time convergence of tracking errors, an adaptive nonsingular terminal sliding mode controller is designed. To estimate the lumped disturbance, a high-gain disturbance observer is employed. Theoretical convergence findings demonstrate that the suggested high-gain disturbance observer may rapidly converge to an adjustable neighborhood of real disturbance values. Adaptive nonsingular terminal sliding mode control law with disturbance compensation is designed based on the disturbance estimation, the system is proven globally uniformly and ultimately bounded under the control law. According to simulation and quantitative analysis, the system's robustness under the same control method is improved when the controller with a high-gain disturbance observer lowers the integral time squared error(ITSE)value by 75% and the integral time absolute error(ITAE) value by 60% for the total disturbance observation error when compared to the controller with a generalized proportional-integral observer.

| [1] |
BOLDEA I, TUTELEA L N, XU W, et al. Linear electric machines, drives, and MAGLEVs: an overview[J]. IEEE Transactions on Industrial Electronics, 2018, 65(9): 7504-7515. doi: 10.1109/TIE.2017.2733492
|
| [2] |
金俊杰, 王岩峰, 徐程程, 等. 人工肾脏泵用磁悬浮轴承设计与磁力特性分析[J]. 西南交通大学学报, 2024, 59(4): 795-803.
JIN J J, WANG Y F, XU C C, et al. Design and magnetic force characteristic analysis of magnetic levitation bearing for artificial kidney pumps[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 795-803(in Chinese).
|
| [3] |
雷城, 蓝益鹏, 孙云鹏. 直线同步电动机磁悬浮系统的模糊分数阶滑模控制[J]. 电机与控制学报, 2022, 26(3): 94-100.
LEI C, LAN Y P, SUN Y P. Fuzzy fractional sliding mode control of magnetic levitation system of linear synchronous motors[J]. Electric Machines and Control, 2022, 26(3): 94-100(in Chinese).
|
| [4] |
马卫华, 胡俊雄, 李铁, 等. EMS型中低速磁浮列车悬浮架技术研究综述[J]. 西南交通大学学报, 2023, 58(4): 720-733. doi: 10.3969/j.issn.0258-2724.20210971
MA W H, HU J X, LI T, et al. Technologies research review of electro-magnetic suspension medium-low-speed maglev train levitation frame[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 720-733(in Chinese). doi: 10.3969/j.issn.0258-2724.20210971
|
| [5] |
WANG J X, YU L. Adaptive resonant-EIDO-based optimized position precision control for magnetic levitation system[J]. IEEE Transactions on Industrial Electronics, 2023, 70(5): 5013-5023. doi: 10.1109/TIE.2022.3186348
|
| [6] |
XU Y S, ZHAO Z G, YIN S, et al. Real-time performance optimization of electromagnetic levitation systems and the experimental validation[J]. IEEE Transactions on Industrial Electronics, 2023, 70(3): 3035-3044. doi: 10.1109/TIE.2022.3167154
|
| [7] |
SUN Y G, XU J Q, QIANG H Y, et al. Adaptive neural-fuzzy robust position control scheme for maglev train systems with experimental verification[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8589-8599. doi: 10.1109/TIE.2019.2891409
|
| [8] |
KHAN M K A A, MANZOOR S, MARAIS H, et al. PID Controller design for a Magnetic Levitation system[C]//Proceedings of the IEEE 4th International Symposium in Robotics and Manufacturing Automation. Piscataway: IEEE Press, 2018: 1-5.
|
| [9] |
NI F, ZHENG Q H, XU J Q, et al. Nonlinear control of a magnetic levitation system based on coordinate transformations[J]. IEEE Access, 2019, 7: 164444-164452. doi: 10.1109/ACCESS.2019.2952900
|
| [10] |
ZHANG Y, XIAN B, MA S G. Continuous robust tracking control for magnetic levitation system with unidirectional input constraint[J]. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5971-5980. doi: 10.1109/TIE.2015.2434791
|
| [11] |
沈莹雅, 张建生, 张远, 等. 主动磁悬浮轴承的鲁棒反演滑模控制[J]. 机械制造与自动化, 2016, 45(1): 194-198. doi: 10.3969/j.issn.1671-5276.2016.01.057
SHEN Y Y, ZHANG J S, ZHANG Y, et al. Robust backstepping sliding-mode control of active magnetic bearing[J]. Machine Building & Automation, 2016, 45(1): 194-198(in Chinese). doi: 10.3969/j.issn.1671-5276.2016.01.057
|
| [12] |
FOLEA S, MURESAN C I, DE KEYSER R, et al. Theoretical analysis and experimental validation of a simplified fractional order controller for a magnetic levitation system[J]. IEEE Transactions on Control Systems Technology, 2016, 24(2): 756-763.
|
| [13] |
ROY P, ROY B K. Sliding mode control versus fractional-order sliding mode control: applied to a magnetic levitation system[J]. Journal of Control, Automation and Electrical Systems, 2020, 31(3): 597-606. doi: 10.1007/s40313-020-00587-8
|
| [14] |
PANDEY S, DOURLA V, DWIVEDI P, et al. Introduction and realization of four fractional-order sliding mode controllers for nonlinear open-loop unstable system: a magnetic levitation study case[J]. Nonlinear Dynamics, 2019, 98(1): 601-621. doi: 10.1007/s11071-019-05216-x
|
| [15] |
SUN Y G, LI W L, QIANG H Y. The design and realization of magnetic suspension controller of low-speed Maglev train[C]//Proceedings of the IEEE/SICE International Symposium on System Integration. Piscataway: IEEE Press, 2016: 1-6.
|
| [16] |
BOONSATIT N, PUKDEBOON C. Adaptive fast terminal sliding mode control of magnetic levitation system[J]. Journal of Control, Automation and Electrical Systems, 2016, 27(4): 359-367. doi: 10.1007/s40313-016-0246-2
|
| [17] |
CHEN Q, YANG Q, LIU M X, et al. Decentralized control design and implementation for magnetic levitation systems with extended state observer[J]. Control Theory and Technology, 2023, 21(3): 397-413. doi: 10.1007/s11768-023-00159-6
|
| [18] |
WANG J X, ZHAO L, YU L. Adaptive terminal sliding mode control for magnetic levitation systems with enhanced disturbance compensation[J]. IEEE Transactions on Industrial Electronics, 2020, 68(1): 756-766.
|
| [19] |
NERKAR S S, LONDHE P S, PATRE B M. Design of super twisting disturbance observer based control for autonomous underwater vehicle[J]. International Journal of Dynamics and Control, 2022, 10: 306-322.
|
| [20] |
HU K T, XU J Q, AI Y H, et al. Super-twisting-observer-based equivalent-input-disturbance compensation suspension control of medium-low speed maglev[J]. IEEE Transactions on Vehicular Technology, 2024, 73(6): 9009-9014. doi: 10.1109/TVT.2024.3355110
|
| [21] |
IZADI M, FAIEGHI R. High-gain disturbance observer for robust trajectory tracking of quadrotors[J]. Control Engineering Practice, 2024, 145: 105854. doi: 10.1016/j.conengprac.2024.105854
|
| [22] |
SUN Y G, XU J Q, QIANG H Y, et al. Adaptive sliding mode control of maglev system based on RBF neural network minimum parameter learning method[J]. Measurement, 2019, 141: 217-226. doi: 10.1016/j.measurement.2019.03.006
|
| [23] |
曹泽华, 杨杰, 胡海林. 单点磁悬浮系统自抗扰自适应控制[J]. 哈尔滨工业大学学报, 2024, 56(8): 86-93. doi: 10.11918/202305034
CAO Z H, YANG J, HU H L. Active disturbance rejection and adaptive control of magnetic suspension system[J]. Journal of Harbin Institute of Technology, 2024, 56(8): 86-93(in Chinese). doi: 10.11918/202305034
|
| [24] |
FENG Y, YU X H, MAN Z H. Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38(12): 2159-2167. doi: 10.1016/S0005-1098(02)00147-4
|
| [25] |
WANG J X, RONG J Y, YU L. Dynamic prescribed performance sliding mode control for DC–DC buck converter system with mismatched time-varying disturbances[J]. ISA Transactions, 2022, 129: 546-557. doi: 10.1016/j.isatra.2022.02.019
|
| [26] |
WON D, KIM W, SHIN D, et al. High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2): 787-795. doi: 10.1109/TCST.2014.2325895
|
| [27] |
DIBENEDETTO E. Real analysis[M]. Boston: Birkhäuser Boston, 2002.
|
| [28] |
GRIGORIADIS D E. A unified algebraic approach to control design[M]. Boca Raton: CRC Press, 1997.
|
| [29] |
KHALIL H K. Nonlinear systems[M]. 3rd ed. Upper Saddle River: PrenticeHall, 2002.
|
| [30] |
WANG J X, RONG J Y, YANG J. Adaptive fixed-time position precision control for magnetic levitation systems[J]. IEEE Transactions on Automation Science and Engineering, 2023, 20(1): 458-469. doi: 10.1109/TASE.2022.3156943
|

Figures(7) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: