| Citation: | LIU W R,WEI Z F,JIN Z B,et al. Human-robot physical interaction control method based on iterative optimal impedance[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(6):1843-1851 (in Chinese) doi: 10.13700/j.bh.1001-5965.2023.0314

|
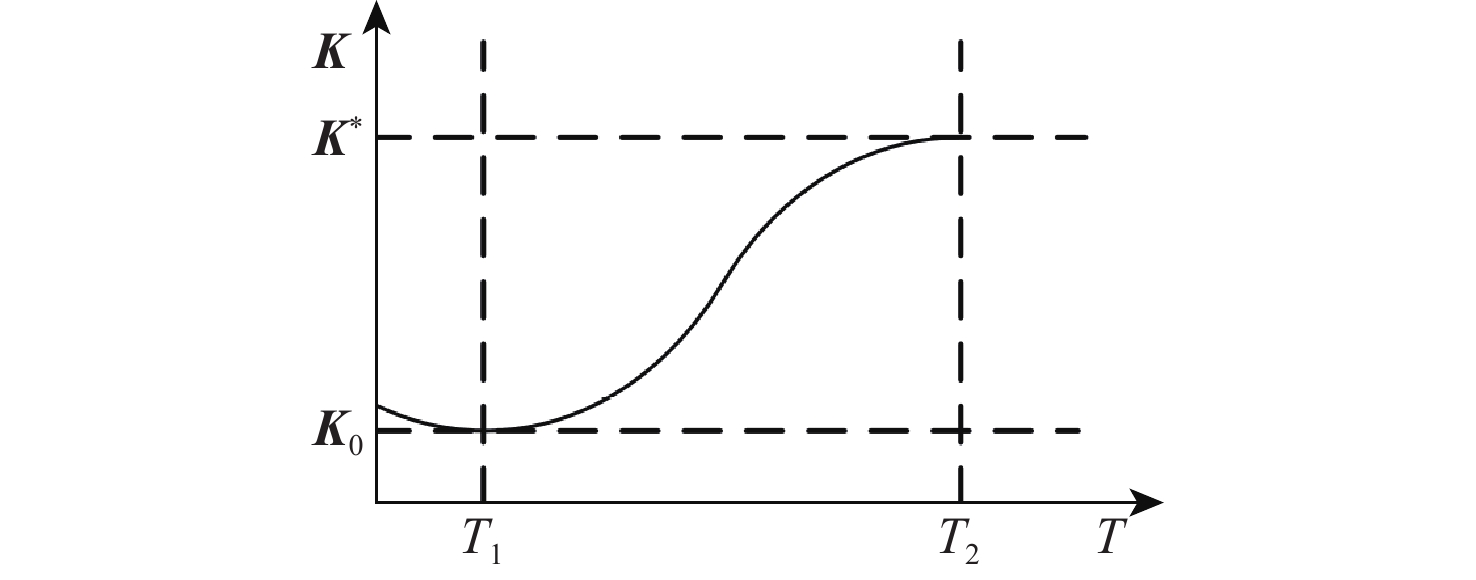
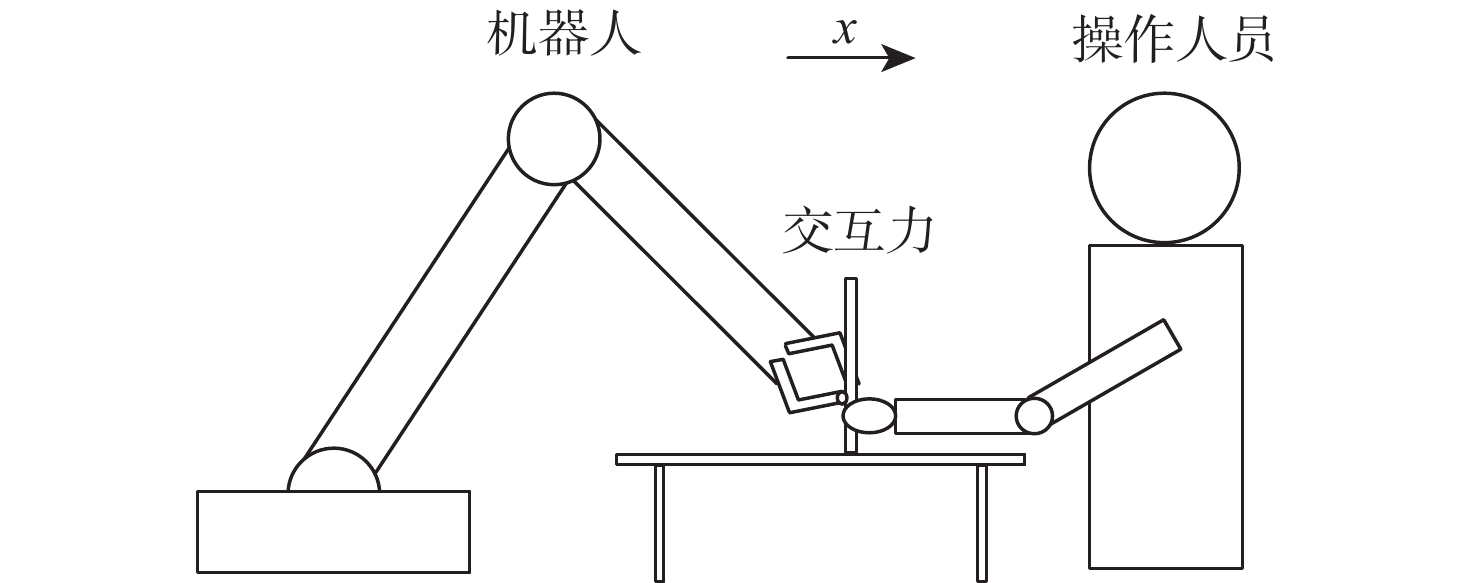
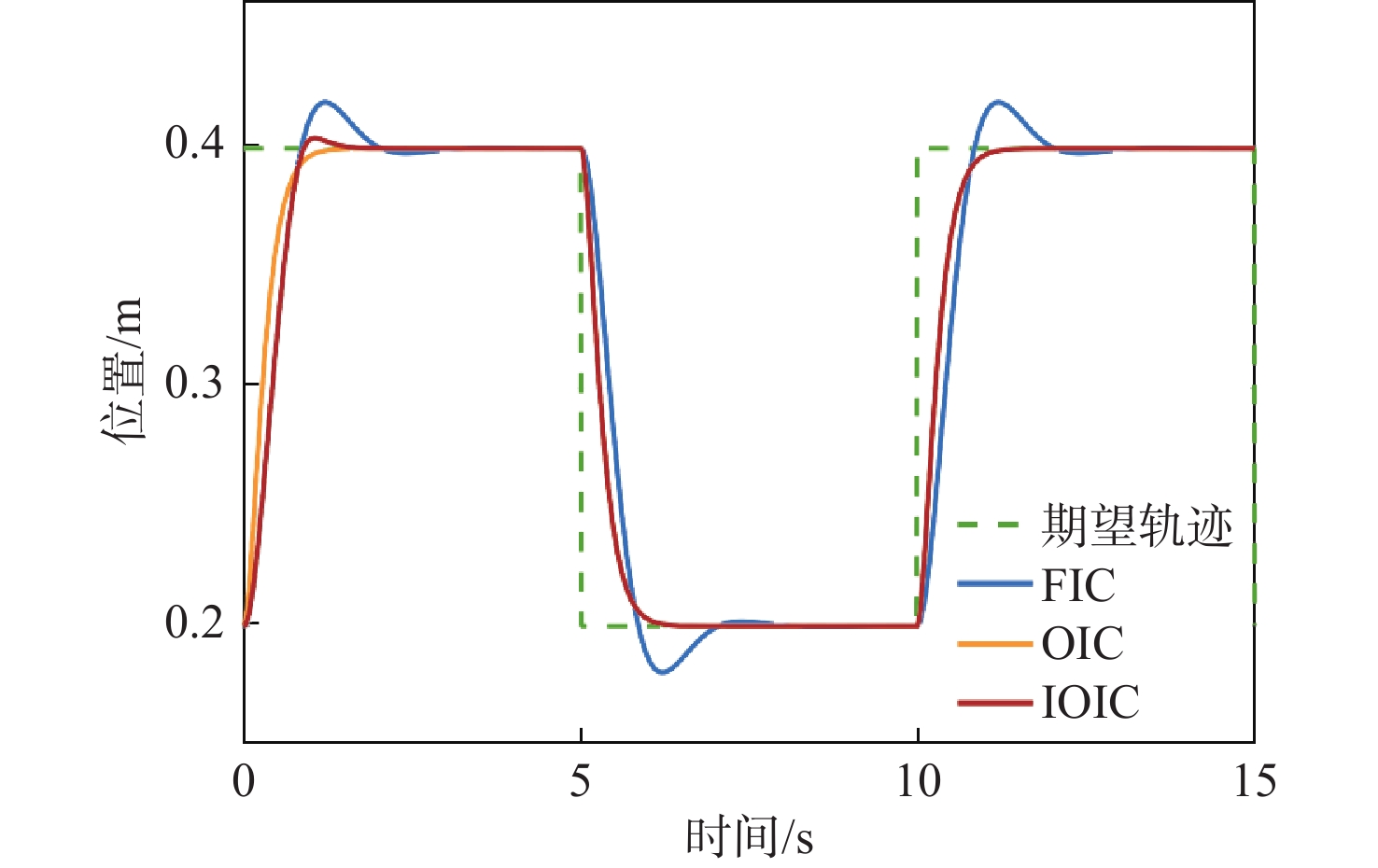
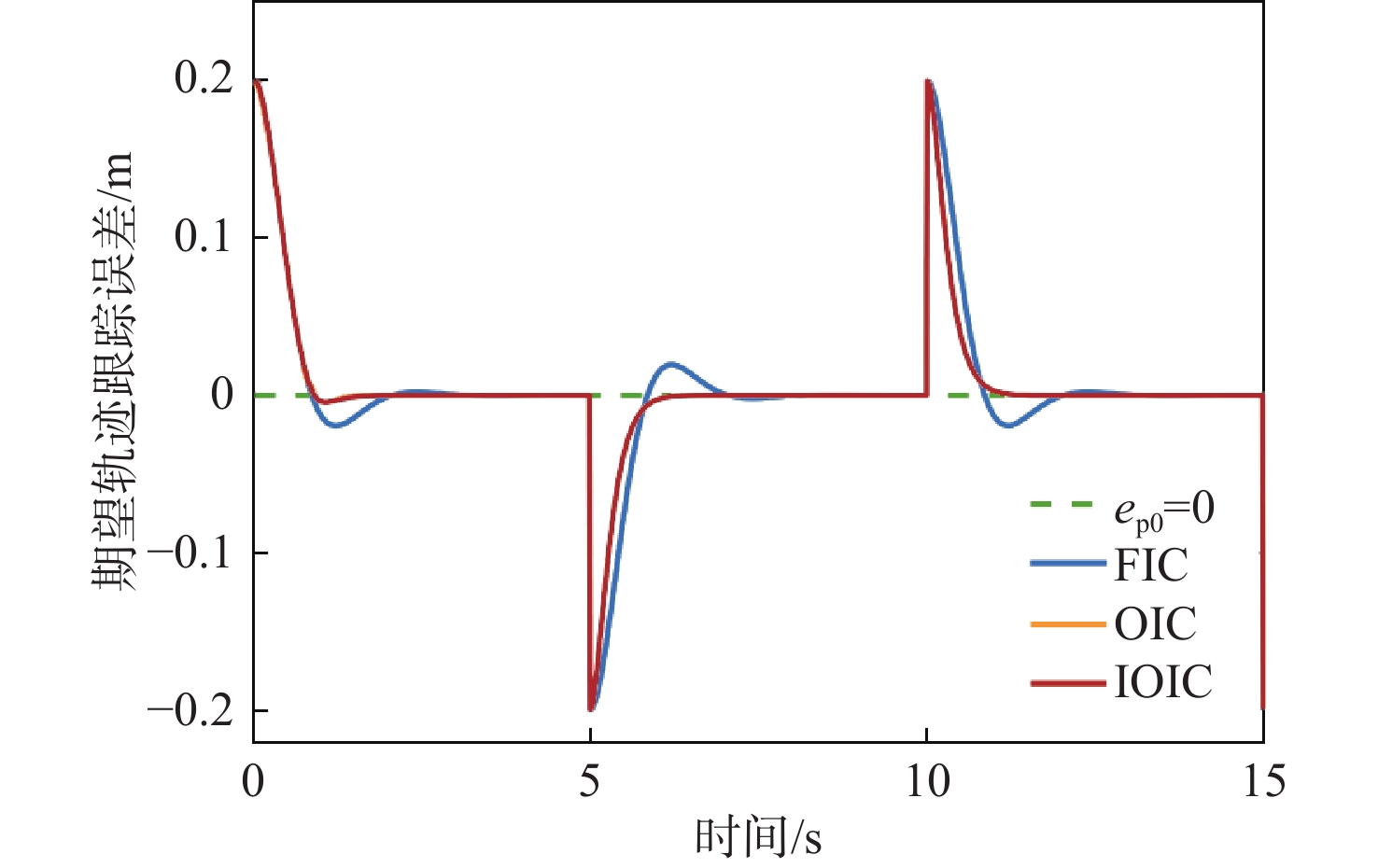
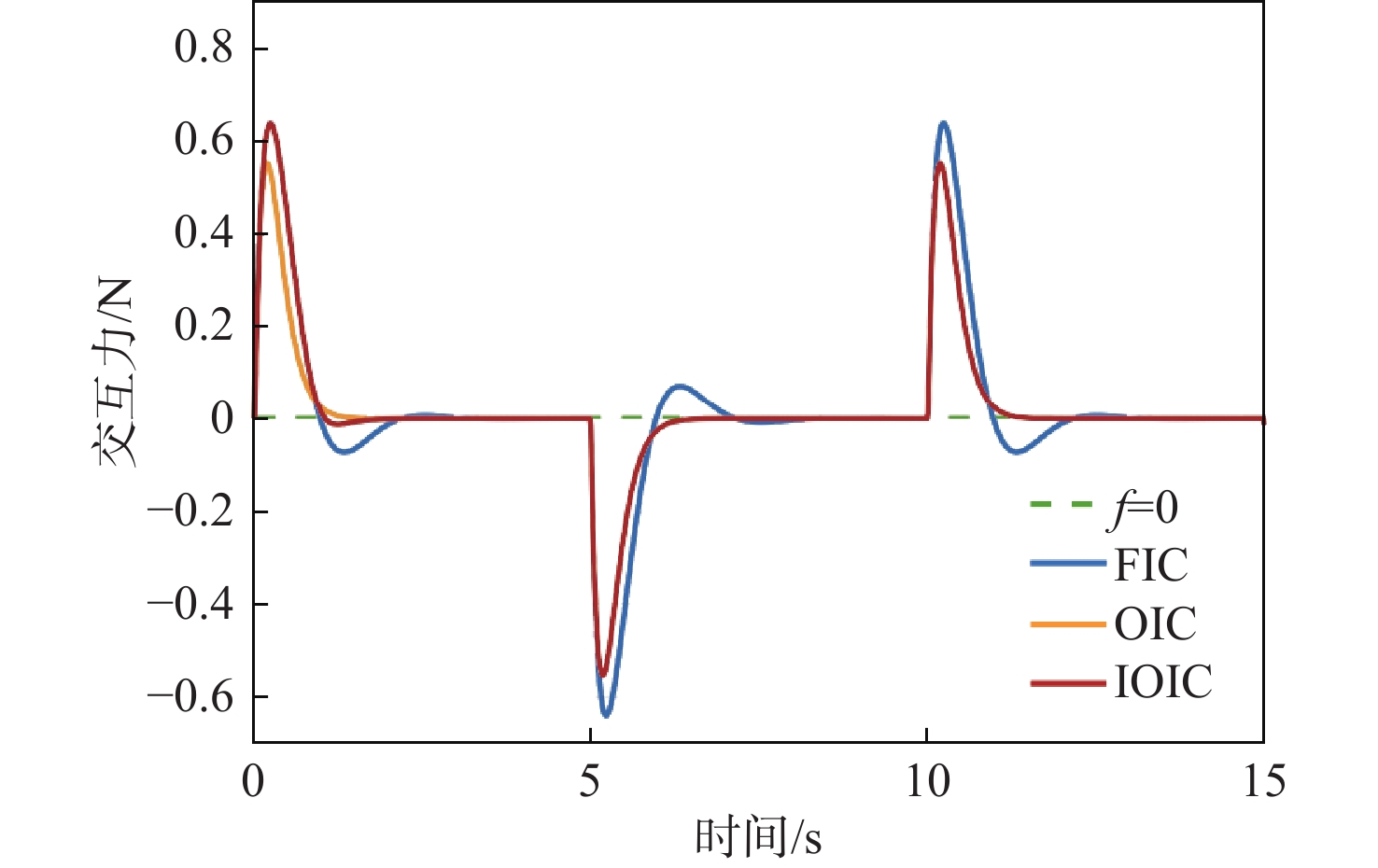
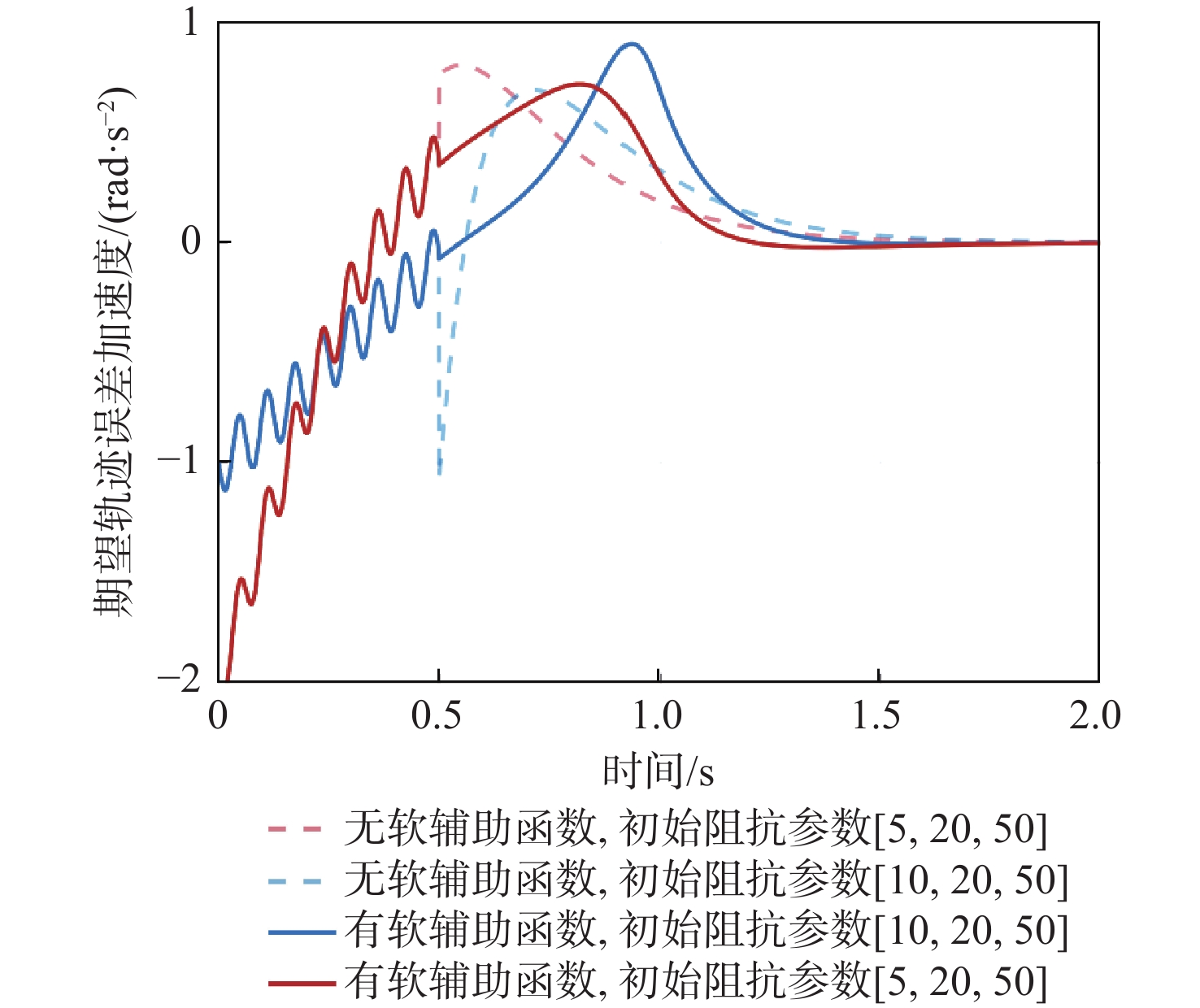
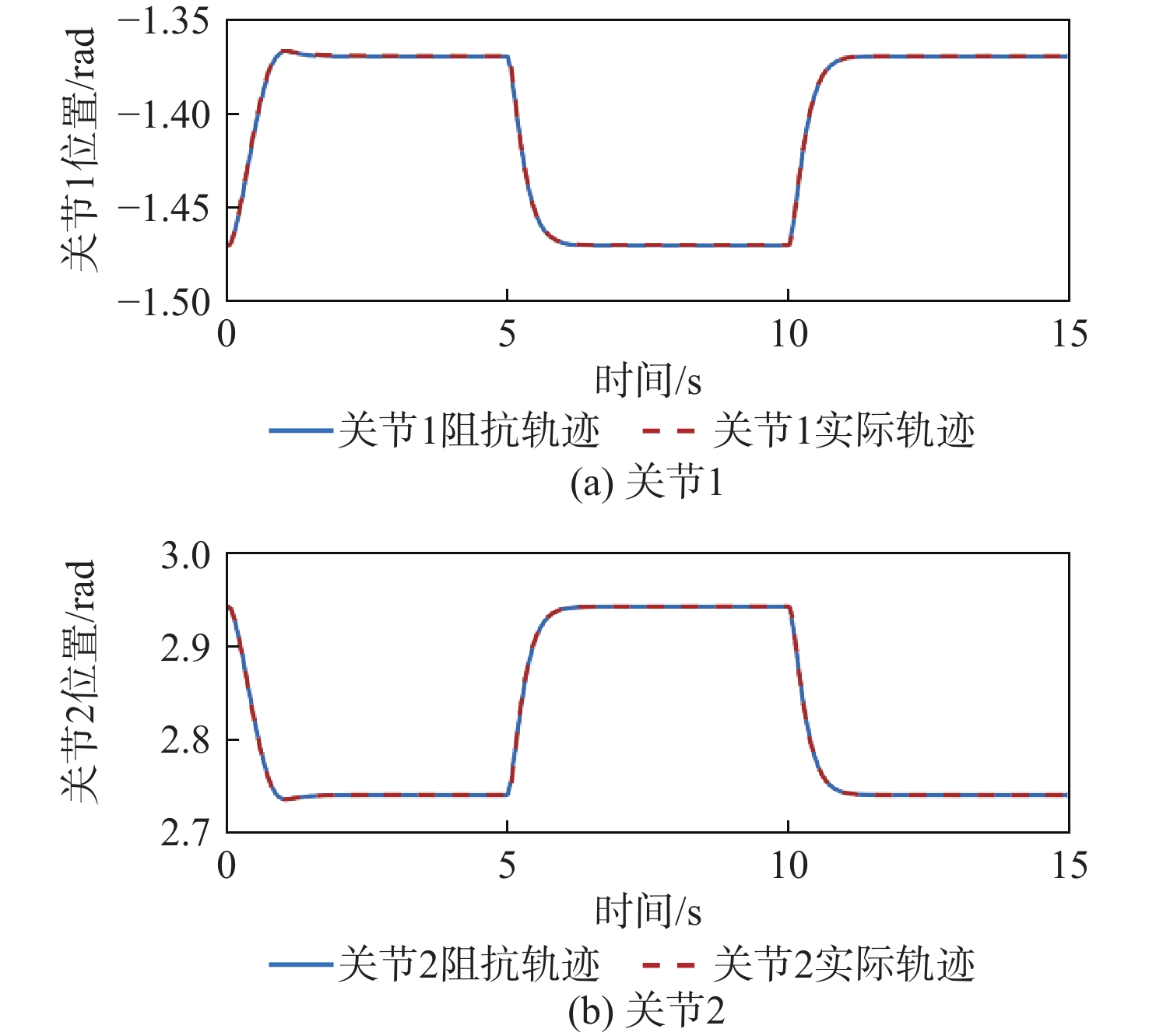
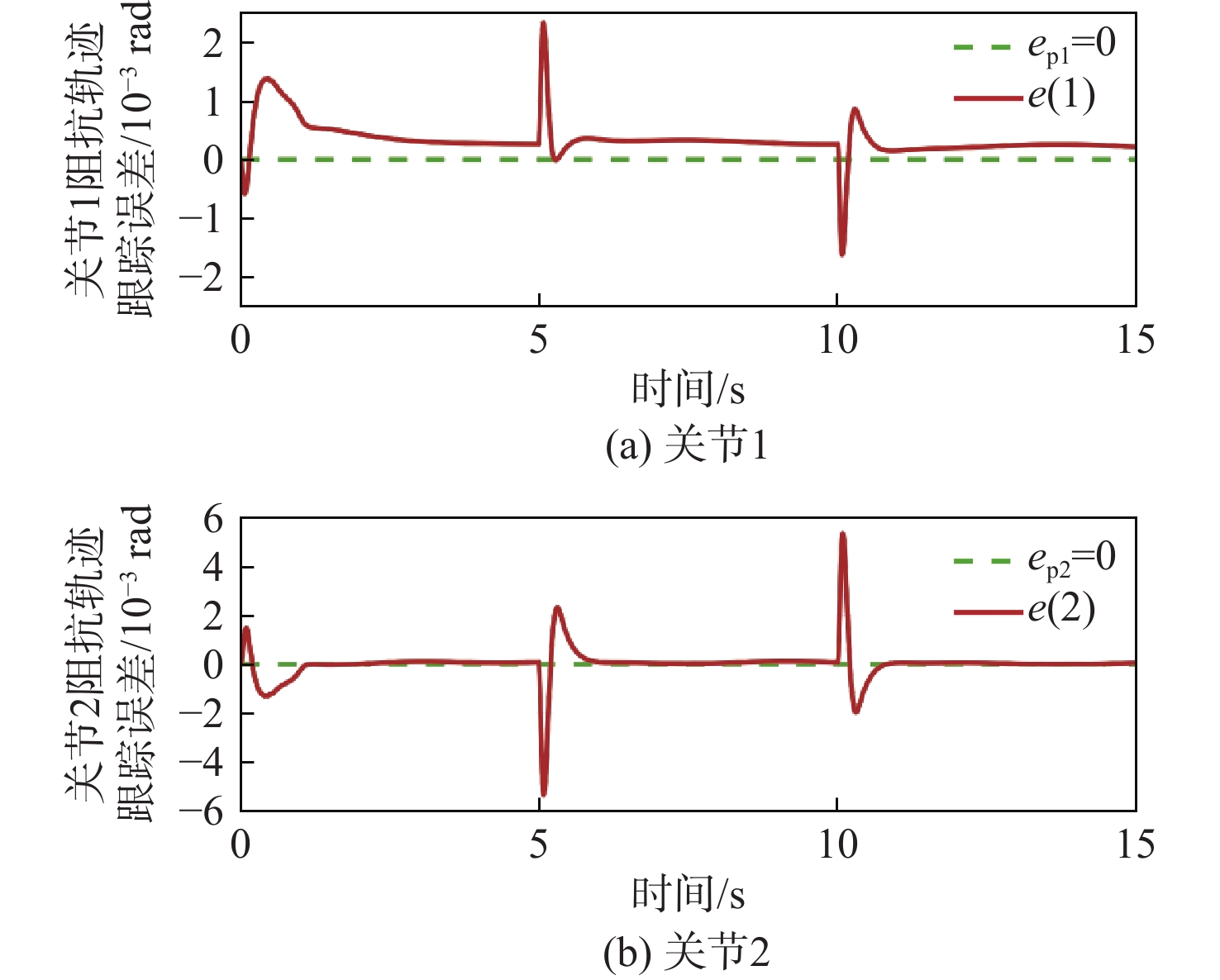
In order to improve the accuracy and compliance of human-robot physical interaction and achieve optimal interaction performance, a human-robot physical interaction control method based on iterative optimal impedance was proposed to solve the problem that iterative learning-based impedance control method needs to repeat the same task many times. The proposed method draws on the mechanism by which iterative optimal control can optimize cost function to determine optimal control input to the system without information of the system matrix. A double-loop control structure was used for the proposed control method. An iterative optimal impedance controller (IOIC) was designed for a task-oriented outer loop. The problem of determining optimal impedance parameters was described as a linear quadratic regulator problem, which utilized iterative optimal control to find optimal feedback gain and minimize cost function including tracking error and interaction force. Robot jitter caused by parameter mutations was avoided by introducing soft auxiliary functions. A nonsingular terminal sliding mode trajectory tracking controller (NTSMTC) was used in the inner loop of the robot to make the actual trajectory of the robot track impedance trajectory output by the outer loop, and the chattering of control law was eliminated by saturation function. Simulation results prove that the proposed method can obtain optimal impedance parameters only by using interactive information in the initial stage of the task once in a human-robot collaborative task, so as to minimize the trajectory tracking error and the force consumed by the human during the task.

| [1] |
李琳, 肖佳栋, 张铁, 等. 基于自适应迭代的机器人曲面恒力跟踪[J]. 北京亚洲成人在线一二三四五六区学报, 2019, 45(4): 641-649.
LI L, XIAO J D, ZHANG T, et al. Constant-force curved-surface-tracking with robotic manipulator based on adaptive iterative algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(4): 641-649(in Chinese).
|
| [2] |
ZAHEDI F, CHANG D, LEE H. User-adaptive variable damping control using Bayesian optimization to enhance physical human-robot interaction[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2724-2731. doi: 10.1109/LRA.2022.3144511
|
| [3] |
LIU X, GE S S, ZHAO F, et al. A dynamic behavior control framework for physical human-robot interaction[J]. Journal of Intelligent & Robotic Systems, 2020, 101(1): 14.
|
| [4] |
HOGAN N. Impedance control: an approach to manipulation[J]. Journal of Dynamic Systems, Measurement, and Control, 1985, 107(1): 1-24.
|
| [5] |
YU X B, LI B, HE W, et al. Adaptive-constrained impedance control for human-robot co-transportation[J]. IEEE Transactions on Cybernetics, 2022, 52(12): 13237-13249. doi: 10.1109/TCYB.2021.3107357
|
| [6] |
SHARIFI M, ZAKERIMANESH A, MEHR J K, et al. Impedance variation and learning strategies in human-robot interaction[J]. IEEE Transactions on Cybernetics, 2022, 52(7): 6462-6475. doi: 10.1109/TCYB.2020.3043798
|
| [7] |
ABU-DAKKA F J, SAVERIANO M. Variable impedance control and learning-a review[J]. Frontiers in Robotics and AI, 2020, 7: 590681. doi: 10.3389/frobt.2020.590681
|
| [8] |
SUN T R, PENG L, CHENG L, et al. Stability-guaranteed variable impedance control of robots based on approximate dynamic inversion[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(7): 4193-4200. doi: 10.1109/TSMC.2019.2930582
|
| [9] |
JIN Z H, QIN D D, LIU A D, et al. Model predictive variable impedance control of manipulators for adaptive precision-compliance tradeoff[J]. IEEE/ASME Transactions on Mechatronics, 2023, 28(2): 1174-1186. doi: 10.1109/TMECH.2022.3204350
|
| [10] |
LIU X, WU J G, WANG L. Sensorless variable impedance compliant control for human-robot interaction[J]. AIP Advances, 2022, 12(11): 115121. doi: 10.1063/5.0118066
|
| [11] |
GRAFAKOS S, DIMEAS F, ASPRAGATHOS N. Variable admittance control in pHRI using EMG-based arm muscles co-activation[C]//Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics. Piscataway: IEEE Press, 2016: 1900-1905.
|
| [12] |
DONG Y T, REN B B. UDE-based variable impedance control of uncertain robot systems[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(12): 2487-2498. doi: 10.1109/TSMC.2017.2767566
|
| [13] |
梅雪松, 刘星, 赵飞, 等. 协作机器人外力感知与交互控制研究现状及展望[J]. 航空制造技术, 2020, 63(9): 22-32.
MEI X S, LIU X, ZHAO F, et al. Research status and prospects of external force perception and interaction control methods for collaborative robots[J]. Aeronautical Manufacturing Technology, 2020, 63(9): 22-32(in Chinese).
|
| [14] |
YANG C G, GANESH G, HADDADIN S, et al. Human-like adaptation of force and impedance in stable and unstable interactions[J]. IEEE Transactions on Robotics, 2011, 27(5): 918-930. doi: 10.1109/TRO.2011.2158251
|
| [15] |
YANG J T, SUN T R, CHENG L, et al. Spatial repetitive impedance learning control for robot-assisted rehabilitation[J]. IEEE/ASME Transactions on Mechatronics, 2023, 28(3): 1280-1290. doi: 10.1109/TMECH.2022.3221931
|
| [16] |
RAHIMI H N, HOWARD I, CUI L. Neural impedance adaption for assistive human-robot interaction[J]. Neurocomputing, 2018, 290: 50-59. doi: 10.1016/j.neucom.2018.02.025
|
| [17] |
XU Z H, LI X X, LI S, et al. Dynamic neural networks based adaptive optimal impedance control for redundant manipulators under physical constraints[J]. Neurocomputing, 2022, 471: 149-160. doi: 10.1016/j.neucom.2021.11.025
|
| [18] |
JOHANSSON R, SPONG M W. Quadratic optimization of impedance control[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 1994: 1: 616-621.
|
| [19] |
MATINFAR M, HASHTRUDI-ZAAD K. Optimization-based robot compliance control: geometric and linear quadratic approaches[J]. International Journal of Robotics Research, 2005, 24(8): 645-656. doi: 10.1177/0278364905056347
|
| [20] |
HUANG H H, YANG C G, CHEN C L P. Optimal robot-environment interaction under broad fuzzy neural adaptive control[J]. IEEE Transactions on Cybernetics, 2021, 51(7): 3824-3835. doi: 10.1109/TCYB.2020.2998984
|
| [21] |
GUO Y D, TIAN Y, WANG H P. Learning-based adaptive optimal impedance control to enhance physical human-robot interaction performance[J]. International Journal of Control, Automation and Systems, 2022, 20(9): 3053-3062. doi: 10.1007/s12555-020-0852-4
|
| [22] |
SUZUKI S, FURUTA K. Adaptive impedance control to enhance human skill on a haptic interface system[J]. Journal of Control Science and Engineering, 2012, 2012: 365067.
|
| [23] |
JIANG Y, JIANG Z P. Computational adaptive optimal control for continuous-time linear systems with completely unknown dynamics[J]. Automatica, 2012, 48(10): 2699-2704. doi: 10.1016/j.automatica.2012.06.096
|

Figures(11) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: