| Citation: | ZHU R N,WANG B,TANG C Y. Improvement of terrain following flight adaptive angle method under small field of view conditions[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):676-682 (in Chinese) doi: 10.13700/j.bh.1001-5965.2023.0057

|
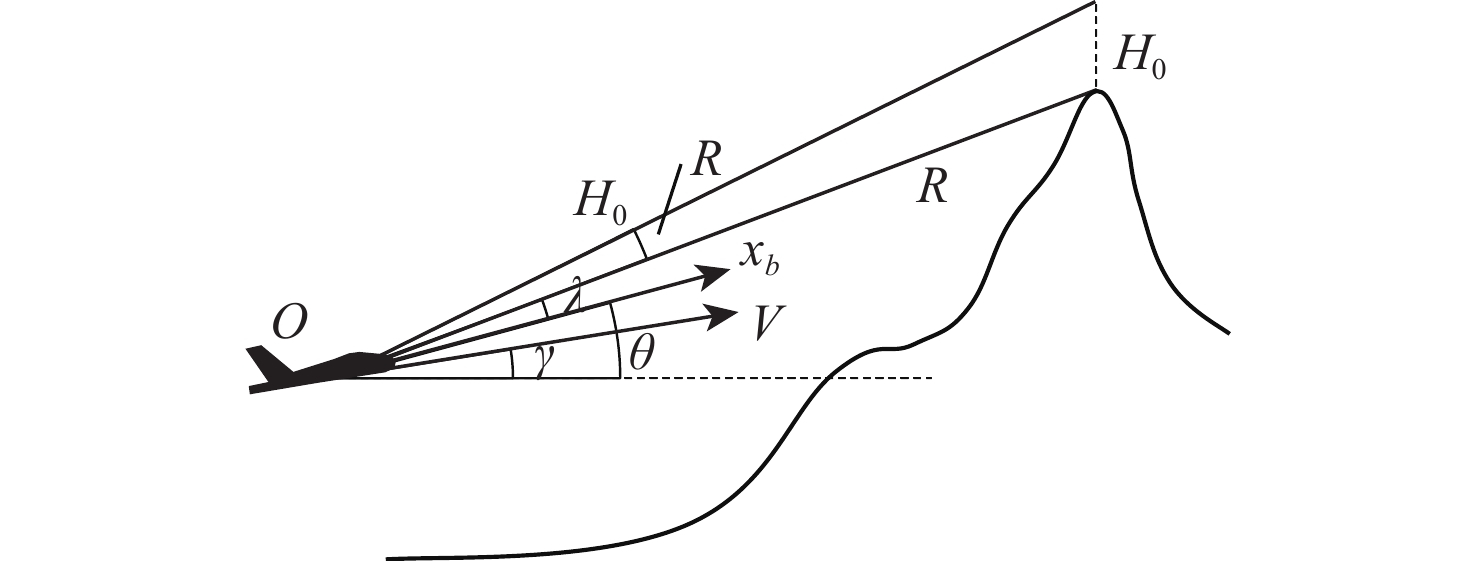
The causes of two wavy tracks were examined in light of the phenomenon of aircraft moving forward in a wavy mode during terrain following flight with the adaptive angle method under the condition of a small field of view. An improved adaptive angle method formula was also proposed when terrain information is lost. A new suppression function was designed and the command gain was derived for the improved formula which verified its consistency with altitude control. The guidance instruction can be given continuously by combining the information before terrain loss with the real-time altitude in the stage of no terrain information. Through the avoidance of frequent changes in flight path angle and normal overload, the method is confirmed to be effective in addressing the wavy track issue in visual simulation experiments with various real terrain data. This allows the aircraft to fly over the peak at the expected safe height and significantly improves the terrain following effectiveness.

| [1] |
姚琼荟. 地形跟踪方法研究[D]. 南京: 南京亚洲成人在线一二三四五六区, 1981: 7-53.
YAO Q H. Study on terrain tracking method [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 1981: 7-53 (in Chinese).
|
| [2] |
王建平, 沈春林. 地形跟随适应角控制方法[J]. 航空学报, 1992, 13(12): 670-677. doi: 10.3321/j.issn:1000-6893.1992.12.016
WANG J P, SHEN C L. The adaptive angle control method of terrain following[J]. Acta Aeronautica et Astronautica Sinica, 1992, 13(12): 670-677 (in Chinese). doi: 10.3321/j.issn:1000-6893.1992.12.016
|
| [3] |
NELSON D R, BARBER D B, MCLAIN T W, et al. Vector field path following for miniature air vehicles[J]. IEEE Transactions on Robotics, 2007, 23(3): 519-529. doi: 10.1109/TRO.2007.898976
|
| [4] |
RADMANESH M, KUMAR M, GUENTERT P H, et al. Overview of path-planning and obstacle avoidance algorithms for UAVs: a comparative study[J]. Unmanned systems, 2018, 6(2): 95-118. doi: 10.1142/S2301385018400022
|
| [5] |
白晓利, 韩亮. 基于数字地图预处理的低空突防飞行路线规划[J]. 北京亚洲成人在线一二三四五六区学报, 2005, 31(8): 853-857. doi: 10.3969/j.issn.1001-5965.2005.08.006
BAI X L, HAN L. Path planning for penetrating aircraft to fly at low altitudes based on technology of digital elevation map[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(8): 853-857 (in Chinese). doi: 10.3969/j.issn.1001-5965.2005.08.006
|
| [6] |
EXPERT F, RUFFIER F. Flying over uneven moving terrain based on optic-flow cues without any need for reference frames or accelerometers[J]. Bioinspiration & biomimetics, 2015, 10(2): 026003.
|
| [7] |
RUFFIER F, FRANCESCHINI N. Optic flow regulation in unsteady environments: a tethered MAV achieves terrain following and targeted landing over a moving platform[J]. Journal of Intelligent & Robotic Systems, 2015, 79(2): 275-293.
|
| [8] |
CAMPOS I, NASCIMENTO E, FREITAS G, et al. A height estimation approach for terrain following flights from monocular vision[J]. Sensors, 2016, 16(12): 2071.
|
| [9] |
CHEN Y, LIU H L. Overview of landmarks for autonomous, vision-based landing of unmanned helicopters[J]. IEEE Aerospace and Electronic Systems Magazine, 2016, 31(5): 14-27.
|
| [10] |
LEE D, RYAN T, KIM H J. Autonomous landing of a VTOL UAV on a moving platform using image-based visual servoing[C]// 2012 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2012: 971-976.
|
| [11] |
ROMERO H, SALAZAR S, LOZANO R. Real-time stabilization of an eight-rotor UAV using optical flow[J]. IEEE Transactions on Robotics, 2009, 25(4): 809-817. doi: 10.1109/TRO.2009.2018972
|
| [12] |
刘小明, 陈万春, 邢晓岚, 等. 光流控制地形跟随与自动着陆[J]. 北京亚洲成人在线一二三四五六区学报, 2012, 38(1): 98-105.
LIU X M, CHEN W C, XING X L, et al. Terrain following and autonomous landing using optical flow[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(1): 98-105 (in Chinese).
|
| [13] |
黄鹏程, 王彪, 唐超颖, 等. 地形跟随飞行中光轴搜索策略[J]. 探测与控制学报, 2022, 44(3): 79-83.
HUANG P C, WANG B, TANG C Y, et al. Optical axis search strategies in terrain following flight[J]. Journal of Detection & Control, 2022, 44(3): 79-83 (in Chinese).
|
| [14] |
范洪达, 马向玲, 叶文. 飞机低空突防航路规划技术[M]. 北京: 国防工业出版社, 2007: 30-32.
FAN H D, MA X L, YE W. Route planning technology of aircraft low-altitude penetration[M]. Beijing: National Defense Industry Press, 2007: 30-32 (in Chinese).
|
| [15] |
乔淼. 基于高差与标准差法的中国地形起伏度研究[J]. 绿色科技, 2020(6): 31-33. doi: 10.3969/j.issn.1674-9944.2020.06.009
QIAO M. Research on Chinese terrain undulation based on height difference and standard deviation method[J]. Journal of Green Science and Technology, 2020(6): 31-33 (in Chinese). doi: 10.3969/j.issn.1674-9944.2020.06.009
|
Figures(9) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.




 DownLoad:
DownLoad: