| Citation: | WANG Z Y,CHEN Y,ZHOU B,et al. A point cloud semantic segmentation method for unstructured roads[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):457-465 (in Chinese) doi: 10.13700/j.bh.1001-5965.2023.0045

|
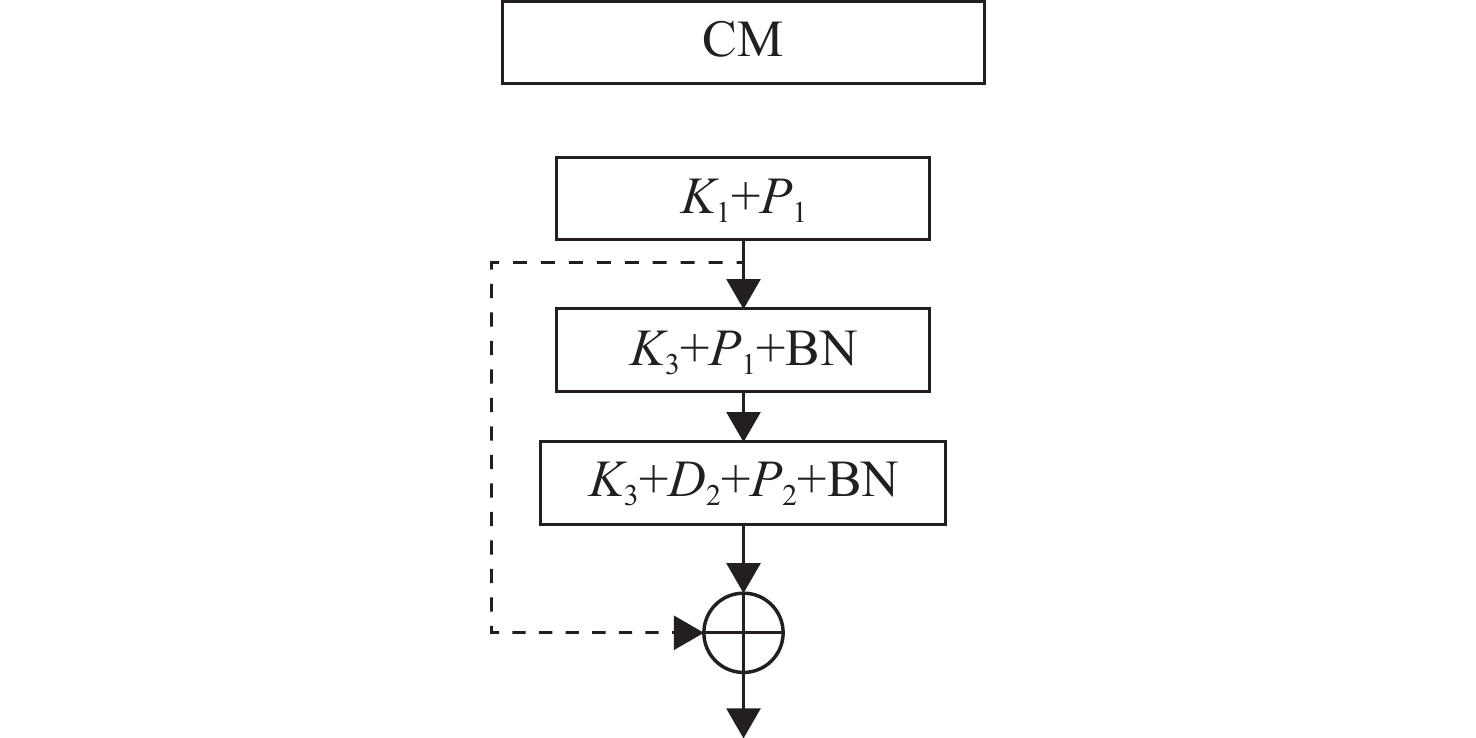
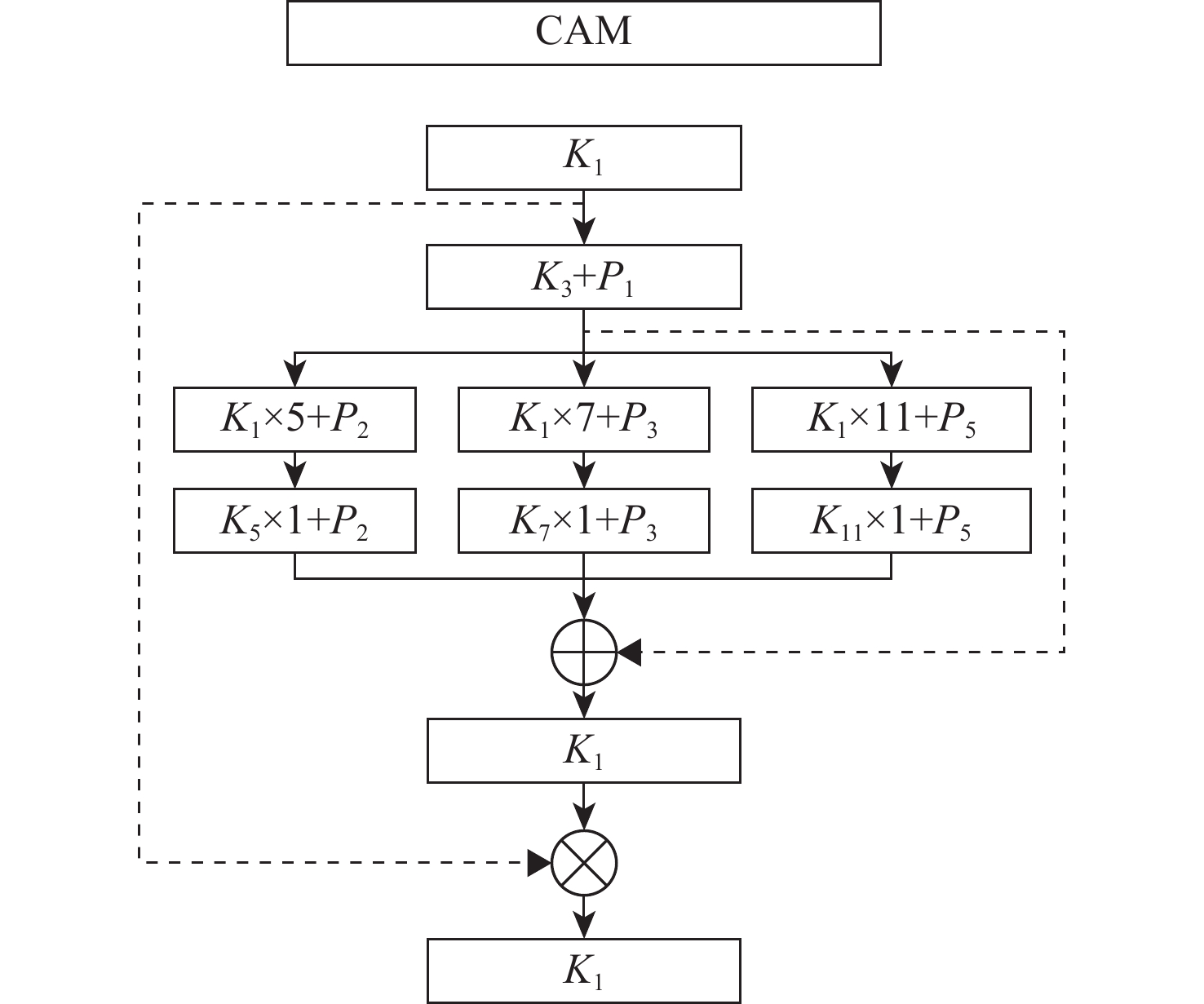
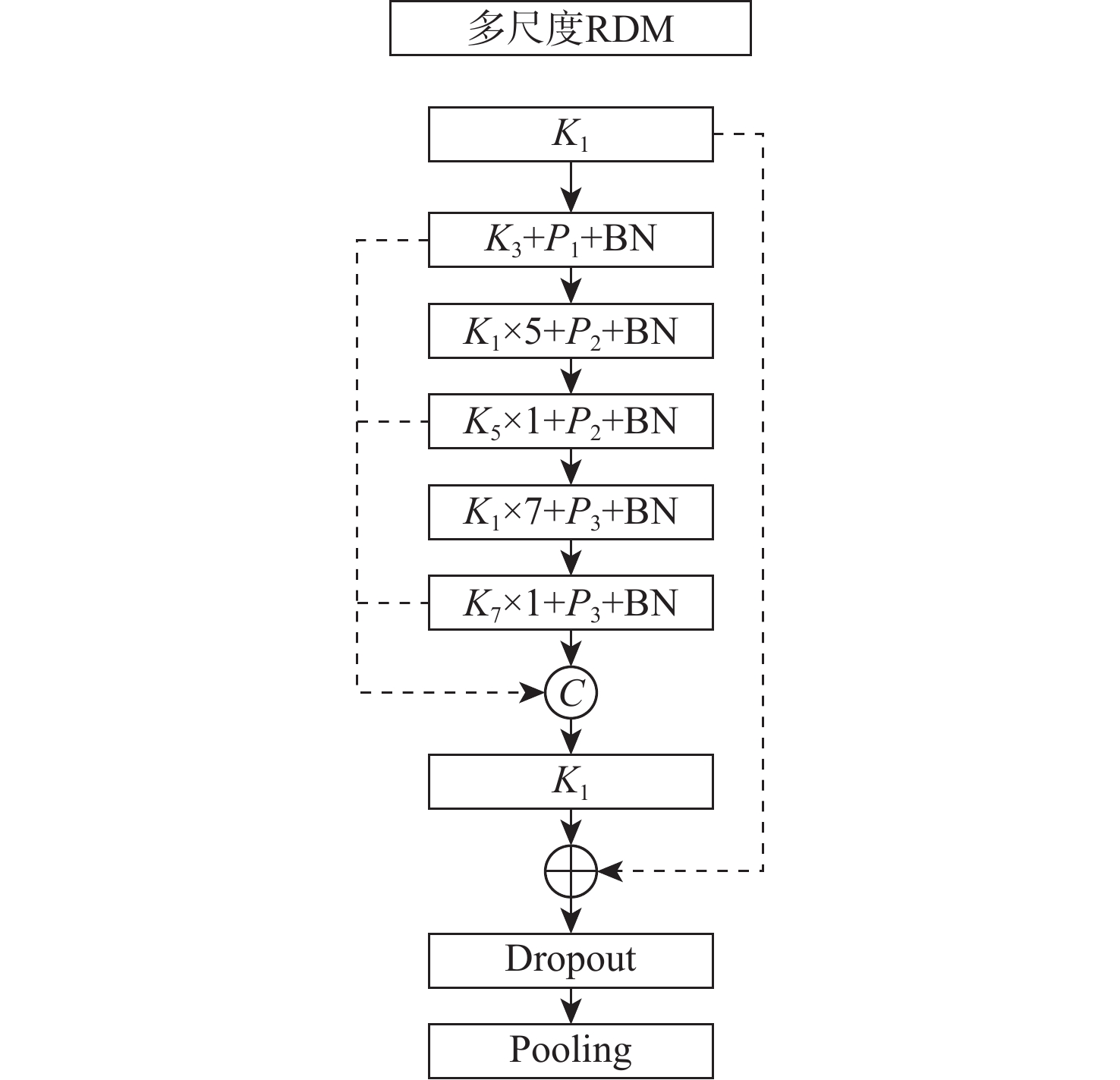
A point cloud semantic segmentation method for unstructured road scenes, represented by open-pit mining areas, is proposed to address issues such as harsh environmental conditions, blurred road boundaries, and significant differences in obstacle sizes. The method includes preprocessing, feature extraction networks, and inverse processing. Among them, preprocessing maps the three-dimensional point cloud to a two-dimensional Range View (RV) graph through coordinate transformation to improve network inference speed; The feature extraction network includes a convolutional attention module and a multi-scale residual module. The convolutional attention module is used to refine the segmentation boundaries and solve the problem of blurred road boundaries; The multi-scale residual module uses a large convolution kernel to expand the receptive field and fuse up and down sampling features to adapt to the problem of large changes in obstacle size in unstructured road environments; Inverse processing uses the K-nearest neighbor (KNN) algorithm to correct semantic labels and map point clouds back to three-dimensional space. The proposed method was tested on a typical unstructured road open-pit mining dataset, with an average intersection to union ratio of 85.1% and an inference speed of 6.423 ms. Compared with mainstream semantic segmentation network based on spherical projection, the overall accuracy was improved by 3%. In addition, the proposed method has been practically applied in unstructured road scenarios.

| [1] |
RONNEBERGER O, FISCHER P, BROX T. U-net: Convolutional networks for biomedical image segmentation[C]//Proceedings of the International Conference on Medical Image Computing and Computer-assisted Intervention. Berlin: Springer, 2015: 234-241.
|
| [2] |
BADRINARAYANAN V, HANDA A, CIPOLLA R. SegNet: A deep convolutional encoder-decoder architecture for robust semantic pixel-wise labelling[EB/OL]. (2015-01-01)[2023-02-03]. http://arxiv.org/abs/1505.07293v1.
|
| [3] |
POUDEL R P K, LIWICKI S, CIPOLLA R. Fast-SCNN: Fast semantic segmentation network[EB/OL]. (2019-01-01) [2023-02-03]. http://arxiv.org/abs/1902.04502v1.
|
| [4] |
GUO M H, LU C Z, HOU Q B, et al. SegNeXt: Rethinking convolutional attention design for semantic segmentation[EB/OL]. (2022-01-01) [2023-02-03]. http://arxiv.org/abs/2209.08575v1.
|
| [5] |
ZHAO Y, TIAN W, CHENG H. Pyramid Bayesian method for model uncertainty evaluation of semantic segmentation in autonomous driving[J]. Automotive Innovation, 2022, 5(1): 70-78. doi: 10.1007/s42154-021-00165-x
|
| [6] |
马素刚, 陈期梅, 侯志强, 等. 基于GLCNet的轻量级语义分割算法[J/OL]. 北京亚洲成人在线一二三四五六区学报, (2023-01-14)[2023-02-03]. http://doi.org/10.13700/j.bh.1001-5965.2022.0822.
MA S G, CHEN Q M, HOU Z Q, et al. Lightweight semantic segmentation algorithm based on GLCNet[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2023-01-14) [2023-02-03]. http://doi.org/10.13700/j.bh.1001-5965.2022.0822 (in Chinese).
|
| [7] |
杨军, 张琛. 融合双注意力机制和动态图卷积的点云语义分割[J]. 北京亚洲成人在线一二三四五六区学报, 2024, 50(10): 2984-2994.
YANG J, ZHANG C. Semantic segmentation of point clouds by fusing dual attention mechanism and dynamic graph convolution[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(10): 2984-2994(in Chinese).
|
| [8] |
CHARLES R Q, HAO S, MO K C, et al. PointNet: Deep learning on point sets for 3D classification and segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 77-85.
|
| [9] |
QI C R, YI L, SU H, et al. PointNet++: Deep hierarchical feature learning on point sets in a metric space[EB/OL]. (2017-01-01) [2023-02-03]. http://arxiv.org/abs/1706.02413v1.
|
| [10] |
THOMAS H, QI C R, DESCHAUD J E, et al. KPConv: Flexible and deformable convolution for point clouds[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 6410-6419.
|
| [11] |
RETHAGE D, WALD J, STURM J, et al. Fully-convolutional point networks for large-scale point clouds[C]//Proceedings of the European Conference on Computer Vision. Piscataway: IEEE Press, 2018: 596-611.
|
| [12] |
DAI A, RITCHIE D, BOKELOH M, et al. ScanComplete: Large-scale scene completion and semantic segmentation for 3D scans[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 4578-4587.
|
| [13] |
GRAHAM B, ENGELCKE M, VAN DER MAATEN L. 3D semantic segmentation with submanifold sparse convolutional networks[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 9224-9232.
|
| [14] |
WU B C, WAN A, YUE X Y, et al. SqueezeSeg: Convolutional neural nets with recurrent CRF for real-time road-object segmentation from 3D LiDAR point cloud[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2018: 1887-1893.
|
| [15] |
WU B C, ZHOU X Y, ZHAO S C, et al. SqueezeSegV2: Improved model structure and unsupervised domain adaptation for road-object segmentation from a LiDAR point cloud[C]//Proceedings of the International Conference on Robotics and Automation. Piscataway: IEEE Press, 2019: 4376-4382.
|
| [16] |
XU C F, WU B C, WANG Z N, et al. SqueezeSegV3: Spatially-adaptive convolution for efficient point-cloud segmentation[C]//Proceedings of the European Conference on Computer Vision. Berlin: Springer, 2020: 1-19.
|
| [17] |
MILIOTO A, VIZZO I, BEHLEY J, et al. RangeNet: Fast and accurate LiDAR semantic segmentation[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2019: 4213-4220.
|
| [18] |
AKSOY E E, BACI S, CAVDAR S. SalsaNet: Fast road and vehicle segmentation in LiDAR point clouds for autonomous driving[C]//Proceedings of the IEEE Intelligent Vehicles Symposium. Piscataway: IEEE Press, 2020: 926-932.
|
| [19] |
CORTINHAL T, TZELEPIS G, ERDAL AKSOY E. SalsaNext: Fast, uncertainty-aware semantic segmentation of LiDAR point clouds[C]//Proceedings of the International Symposium on Visual Computing. Berlin: Springer, 2020: 207-222.
|
| [20] |
QIU H B, YU B S, TAO D C. GFNet: Geometric flow network for 3D point cloud semantic segmentation[EB/OL]. (2022-01-01) [2023-02-03]. http://arxiv.org/abs/2207.02605v2.
|
| [21] |
ZHU X,ZHOU H,WANG T,et al. Cylindrical and asymmetrical 3D convolution networks for LiDAR segmentation[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2021:9934-9943.
|
| [22] |
CHENG R, RAZANI R, TAGHAVI E, et al. (AF)2-S3Net: Attentive feature fusion with adaptive feature selection for sparse semantic segmentation network[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2021: 12542-12551.
|
| [23] |
SHI W Z, CABALLERO J, HUSZÁR F, et al. Real-time single image and video super-resolution using an efficient sub-pixel convolutional neural network[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 1874-1883.
|
| [24] |
DING X H, GUO Y C, DING G G, et al. ACNet: Strengthening the kernel skeletons for powerful CNN via asymmetric convolution blocks[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 1911-1920.
|
| [25] |
BEHLEY J, GARBADE M, MILIOTO A, et al. Semantic KITTI: A dataset for semantic scene understanding of lidar sequences[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 9297-9307.
|

Figures(10) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.




 DownLoad:
DownLoad: