| Citation: | TAN T X,TENG Y,WANG C Y. Research on pre-curved spiral wound pneumatic soft gripper[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):616-624 (in Chinese) doi: 10.13700/j.bh.1001-5965.2023.0010

|
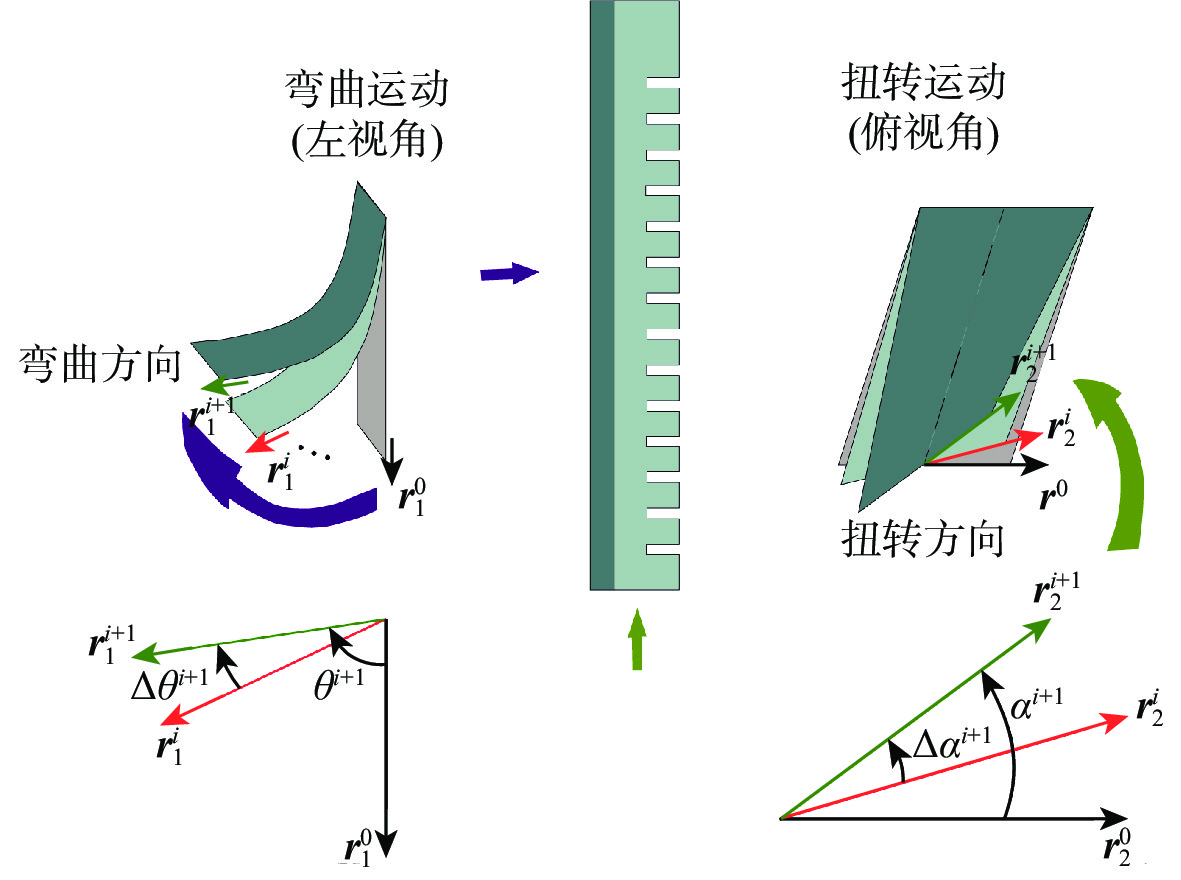
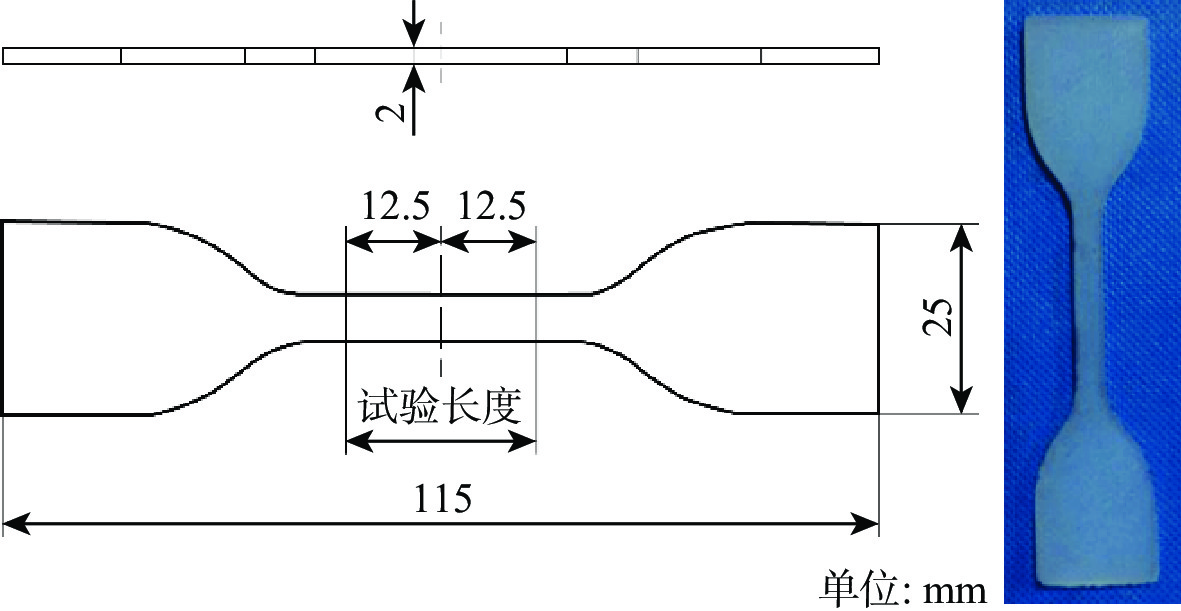
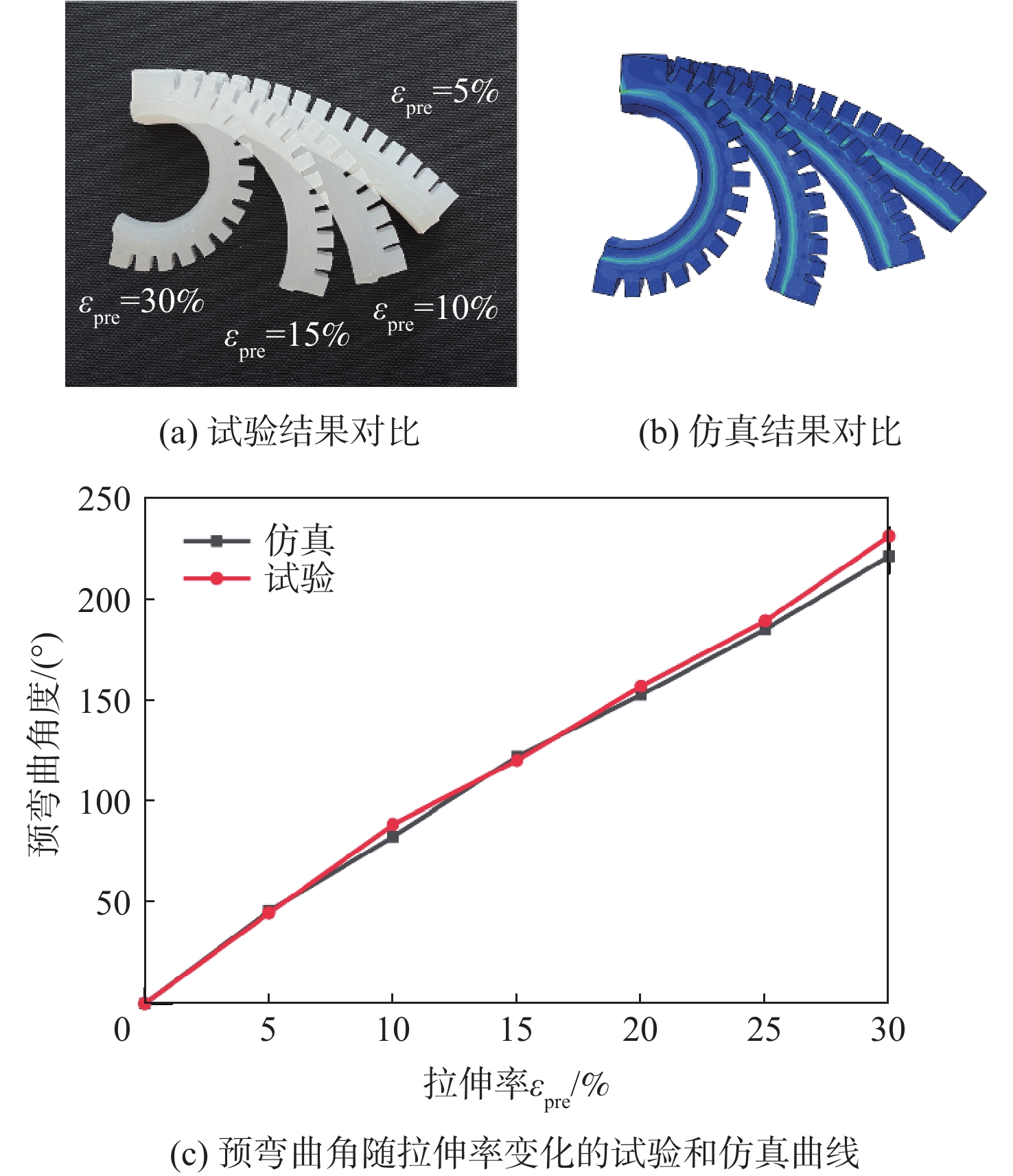
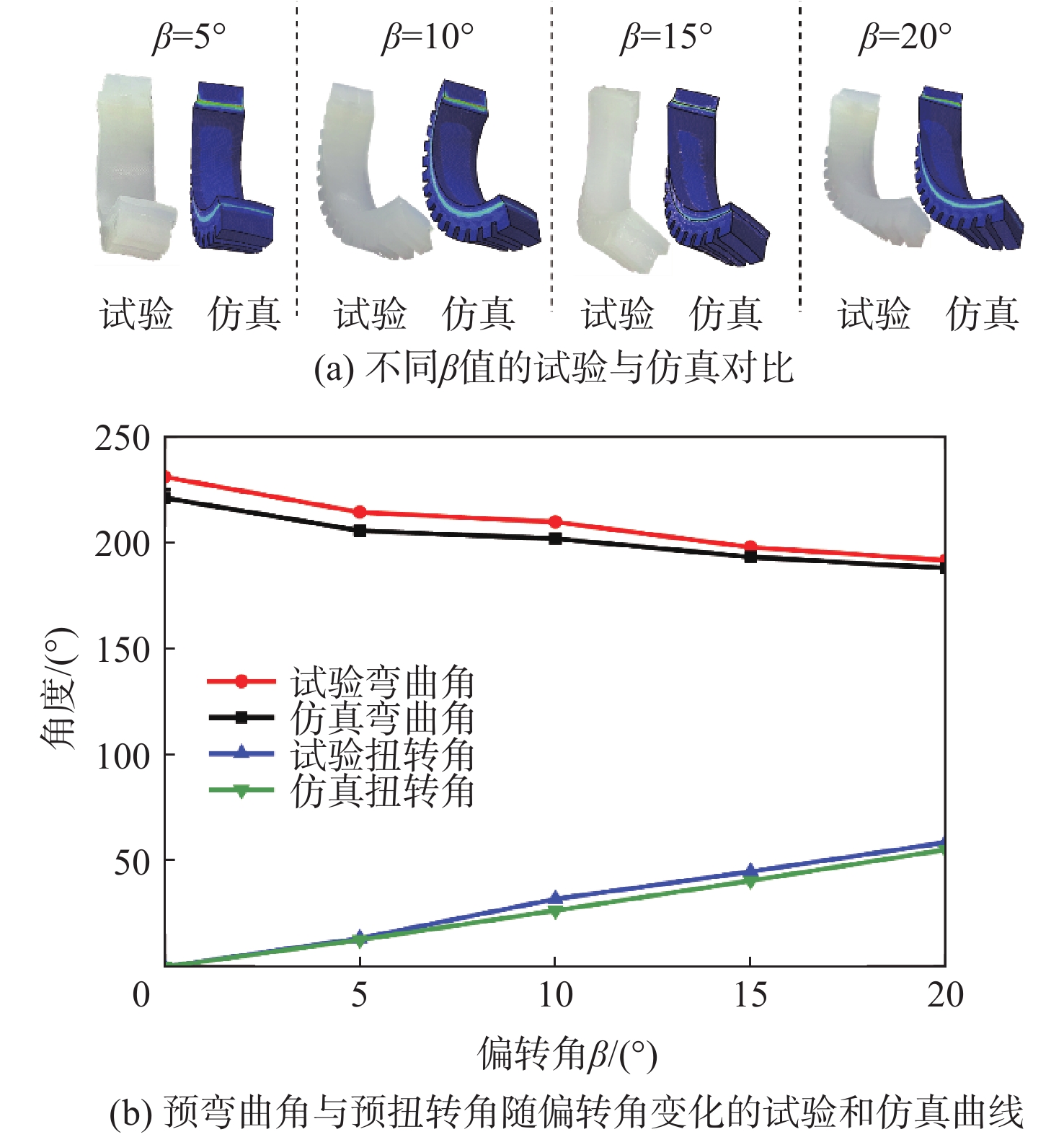
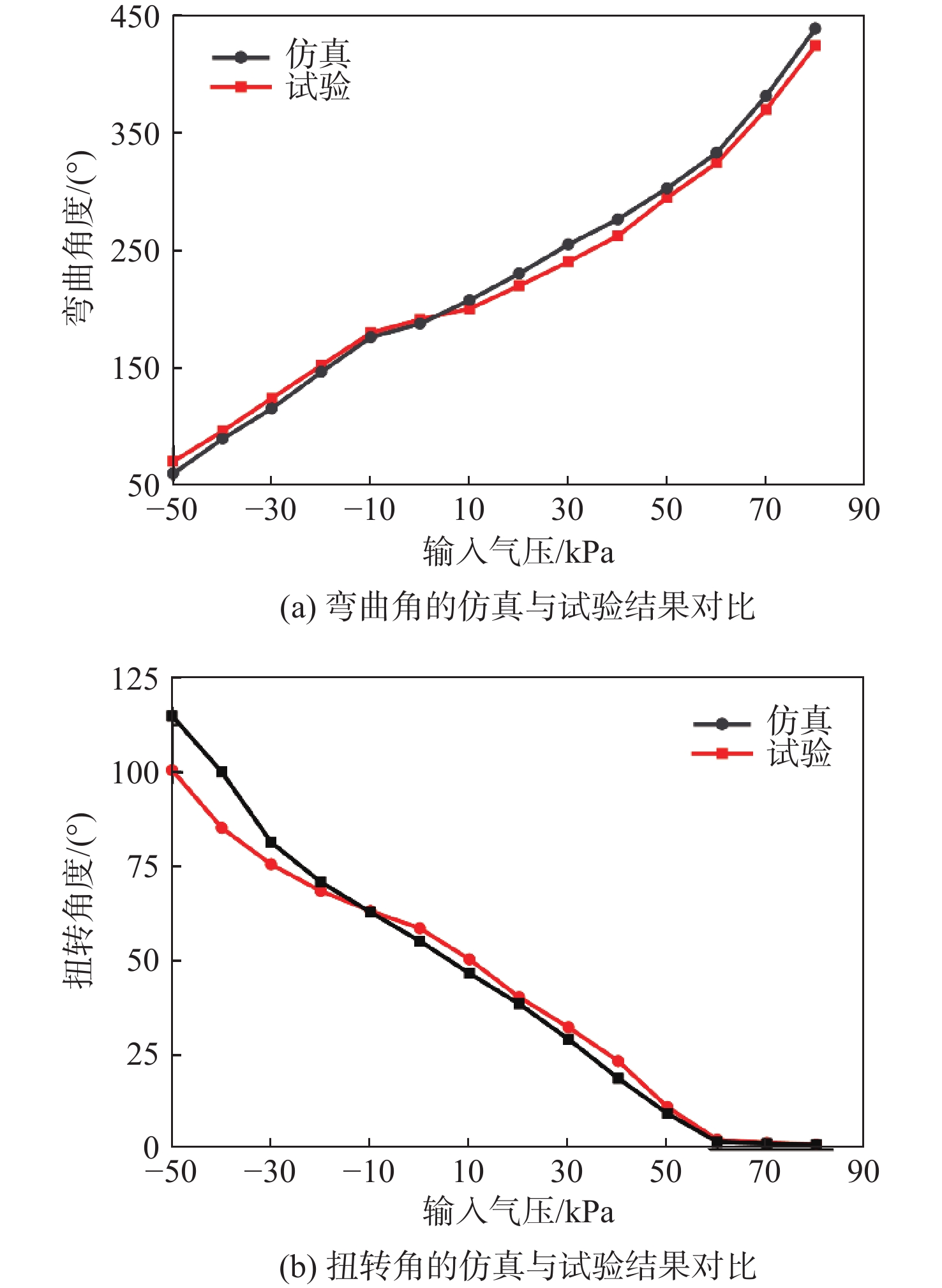
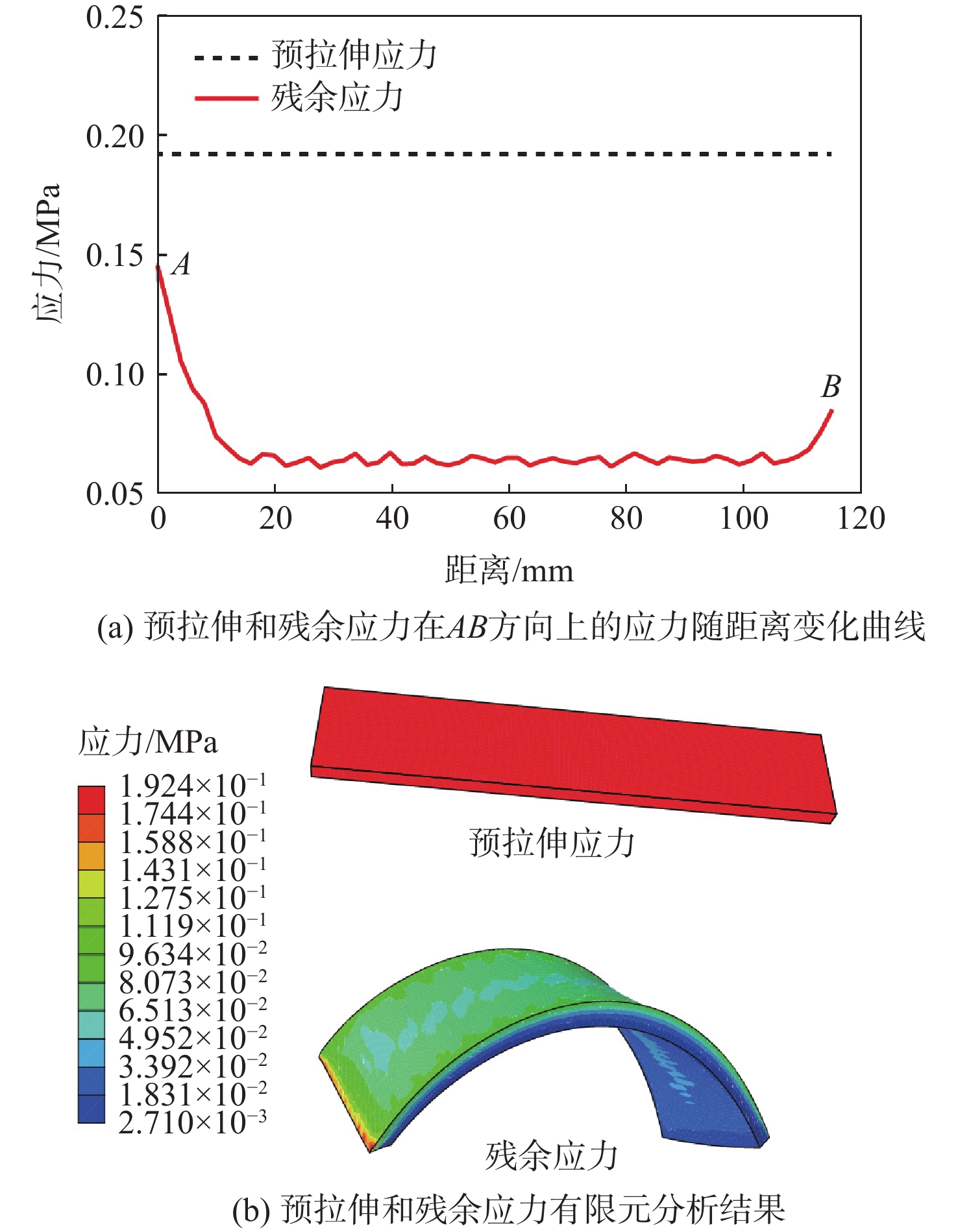
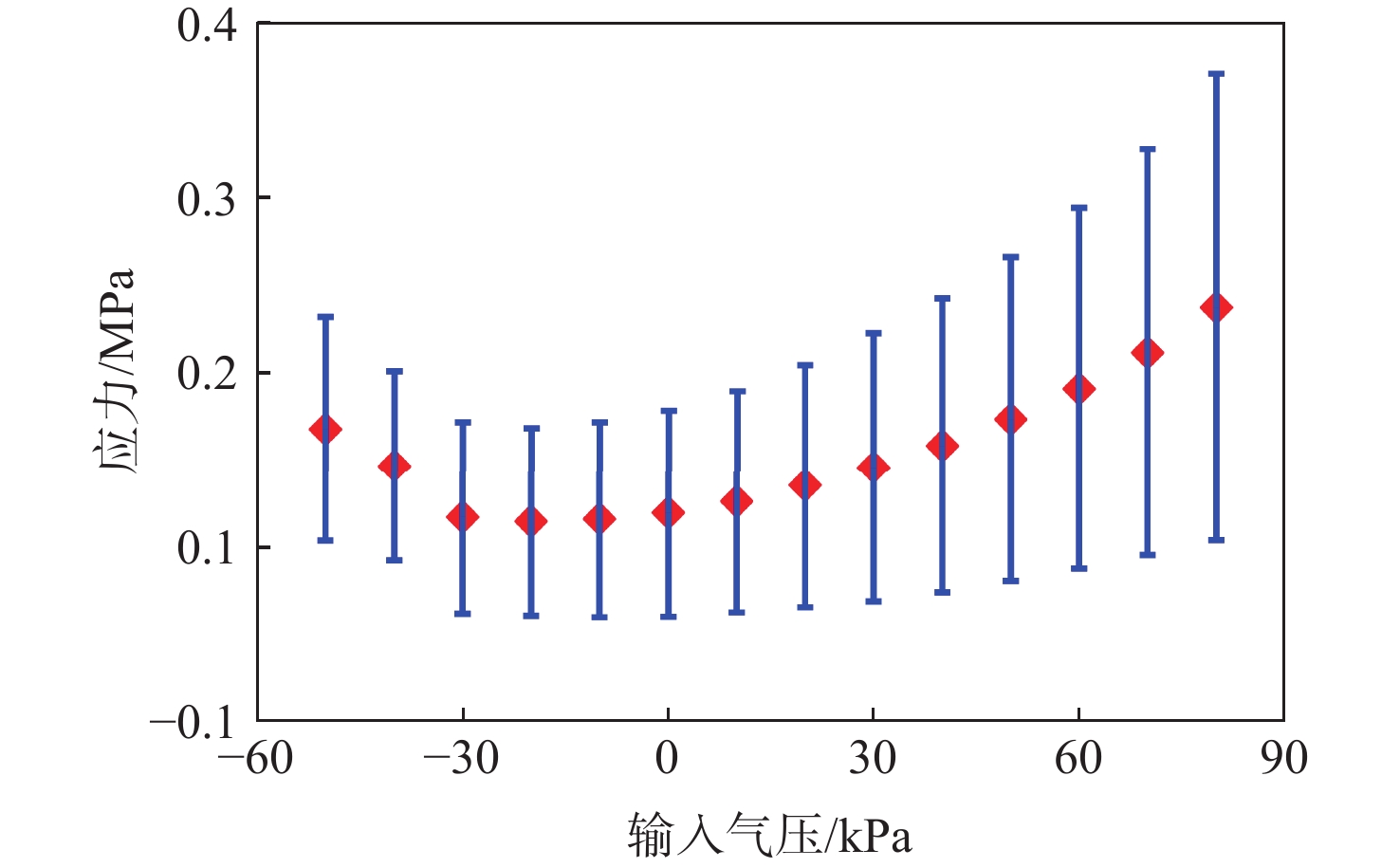
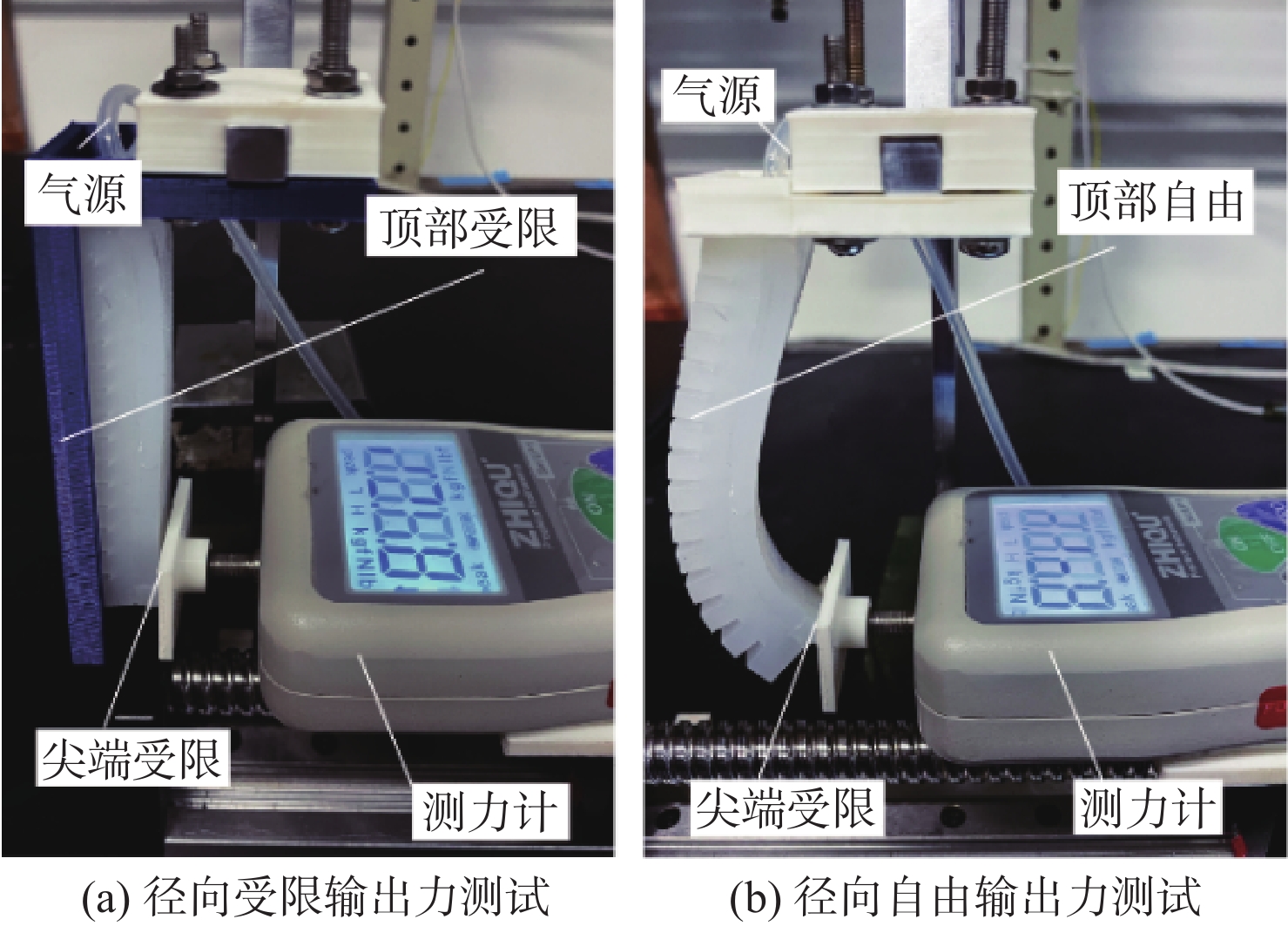
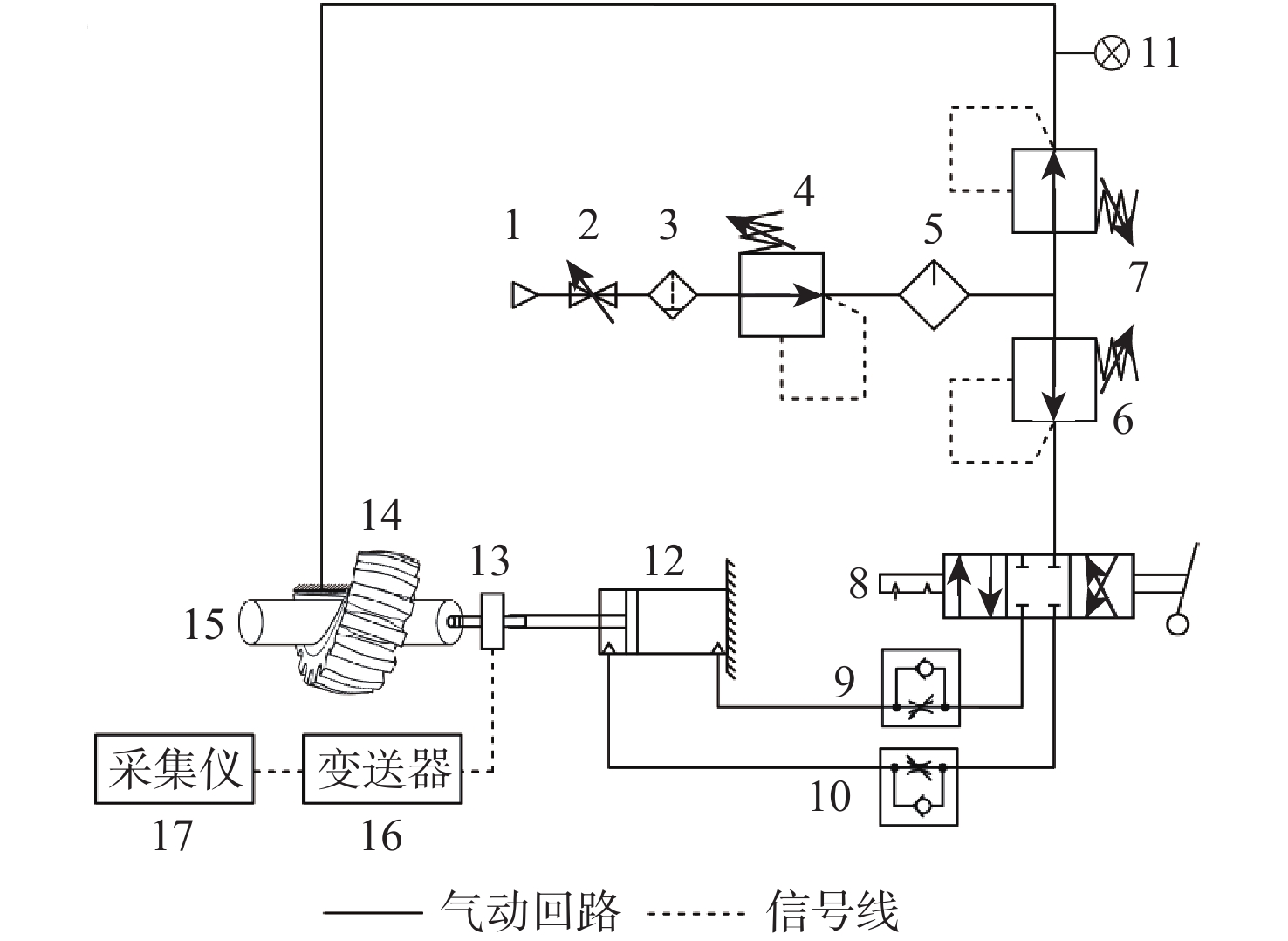
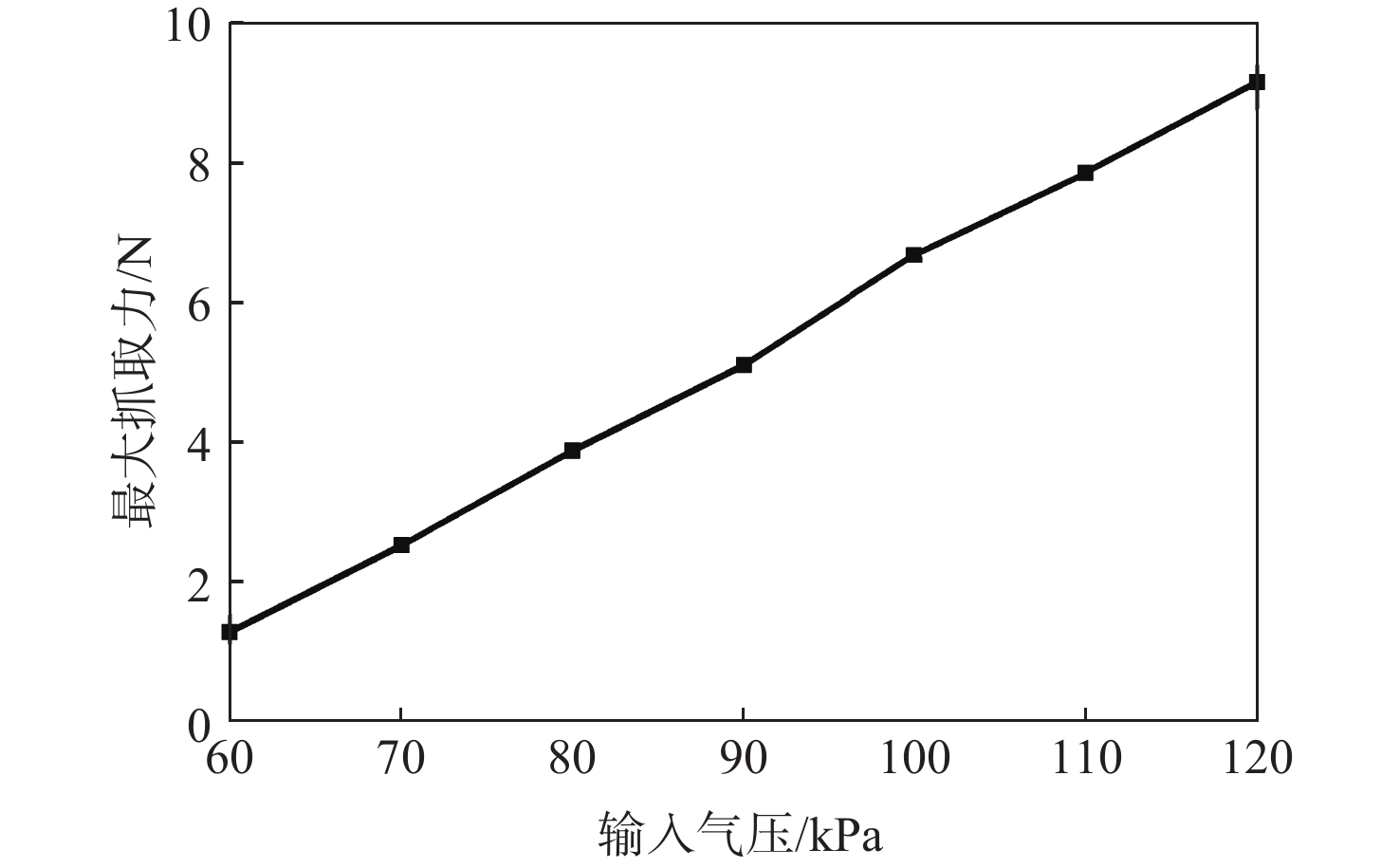
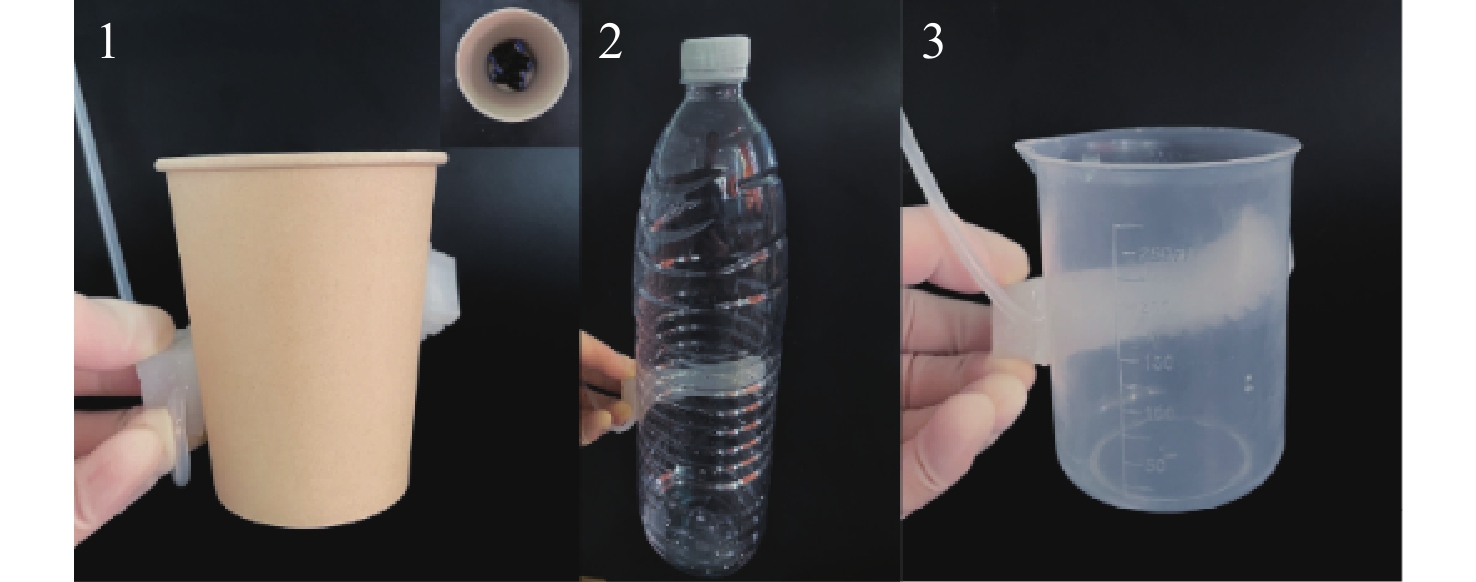
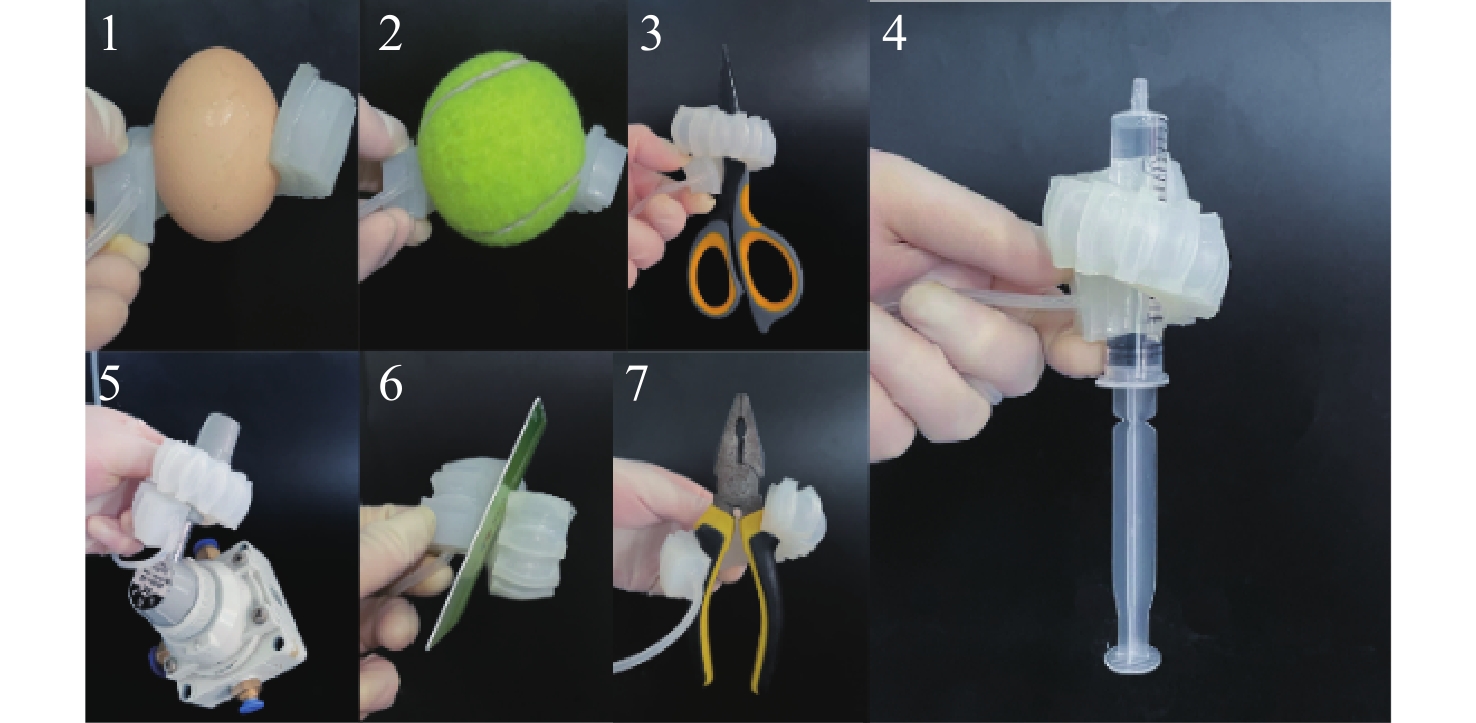
The use of elastic instability to improve the performance of bionic soft robots is getting more and more attention. In this paper, a pre-curved spiral wound pneumatic soft gripper with a monostable structure was designed, which consisted of a strain-limiting layer and a fast pneumatic grid channel layer. The strain-limiting layer was axially pre-stretched, and the fast pneumatic grid channel layer was deflected at a certain angle along the axial pre-stretching direction to bond with the strain-limiting layer. After the pre-stretching was released, a spiral gripper with a pre-curved angle was obtained, which could exhibit a monostable behavior when actuated. Through theoretical and simulation analysis, the pre-bending mechanism under non-pressure actuation and the bending mechanical behavior under pressure actuation were studied. The analysis shows that the stretching ratio and the deflection angle are the key parameters affecting the performance of the gripper. At last, the static test and grasping test of the soft gripper are carried out. The results show that the gripper has good target adaptability and grasping ability. Due to its monostable structure, the gripper can hold objects 1.35 times its weight in the initial state of zero air pressure, and under the condition of pressure actuation, it can hold objects up to 20.85 times its weight.

| [1] |
赵京, 张自强, 郑强, 等. 机器人安全性研究现状及发展趋势[J]. 北京亚洲成人在线一二三四五六区学报, 2018, 44(7): 1347-1358.
ZHAO J, ZHANG Z Q, ZHENG Q, et al. Research status and development trend of robot safety[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(7): 1347-1358 (in Chinese).
|
| [2] |
KIM S, LASCHI C, TRIMMER B. Soft robotics: a bioinspired evolution in robotics[J]. Trends in Biotechnology, 2013, 31(5): 287-294. doi: 10.1016/j.tibtech.2013.03.002
|
| [3] |
RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521: 467-475. doi: 10.1038/nature14543
|
| [4] |
管清华, 孙健, 刘彦菊, 等. 气动软体机器人发展现状与趋势[J]. 中国科学(技术科学), 2020, 50(7): 897-934. doi: 10.1360/SST-2020-0143
GUAN Q H, SUN J, LIU Y J, et al. Status of and trends in soft pneumatic robotics[J]. Scientia Sinica (Technologica), 2020, 50(7): 897-934 (in Chinese). doi: 10.1360/SST-2020-0143
|
| [5] |
鲍官军, 张亚琪, 许宗贵, 等. 软体机器人气压驱动结构研究综述[J]. 高技术通讯, 2019, 29(5): 467-479. doi: 10.3772/j.issn.1002-0470.2019.05.008
BAO G J, ZHANG Y Q, XU Z G, et al. Reveiw on pneumatic-driven structure for soft robot[J]. High Technology Letters, 2019, 29(5): 467-479(in Chinese). doi: 10.3772/j.issn.1002-0470.2019.05.008
|
| [6] |
曹毅, 顾苏程, 翟明浩, 等. 封闭式仿生螺旋缠绕软体夹持器的设计与研究[J]. 北京亚洲成人在线一二三四五六区学报, 2021, 47(1): 15-23.
CAO Y, GU S C, ZHAI M H, et al. Design and research of closed bionic spiral wound soft gripper[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(1): 15-23 (in Chinese).
|
| [7] |
DILIBAL S, SAHIN H, DANQUAH J O, et al. Additively manufactured custom soft gripper with embedded soft force sensors for an industrial robot[J]. International Journal of Precision Engineering and Manufacturing, 2021, 22(4): 709-718. doi: 10.1007/s12541-021-00479-0
|
| [8] |
PAL A, RESTREPO V, GOSWAMI D, et al. Exploiting mechanical instabilities in soft robotics: control, sensing, and actuation[J]. Advanced Materials, 2021, 33(19): 2006939. doi: 10.1002/adma.202006939
|
| [9] |
LIU Y H, LUO K, WANG S, et al. A soft and bistable gripper with adjustable energy barrier for fast capture in space[J]. Soft Robotics, 2023, 10(1): 77-87. doi: 10.1089/soro.2021.0147
|
| [10] |
CHI Y D, TANG Y C, LIU H J, et al. Leveraging monostable and bistable pre-curved bilayer actuators for high-performance multitask soft robots[J]. Advanced Materials Technologies, 2020, 5(9): 2000370. doi: 10.1002/admt.202000370
|
| [11] |
ZHANG Z, NI X Q, WU H L, et al. Pneumatically actuated soft gripper with bistable structures[J]. Soft Robotics, 2022, 9(1): 57-71. doi: 10.1089/soro.2019.0195
|
| [12] |
ZHANG Z, NI X Q, GAO W L, et al. Pneumatically controlled reconfigurable bistable bionic flower for robotic gripper[J]. Soft Robotics, 2022, 9(4): 657-668. doi: 10.1089/soro.2020.0200
|
| [13] |
PAL A, GOSWAMI D, MARTINEZ R V. Elastic energy storage enables rapid and programmable actuation in soft machines[J]. Advanced Functional Materials, 2020, 30(1): 1906603. doi: 10.1002/adfm.201906603
|
| [14] |
WANG T Y, GE L S, GU G Y. Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions[J]. Sensors and Actuators A: Physical, 2018, 271: 131-138. doi: 10.1016/j.sna.2018.01.018
|
| [15] |
XAVIER M S, FLEMING A J, YONG Y K. Finite element modeling of soft fluidic actuators: overview and recent developments[J]. Advanced Intelligent Systems, 2021, 3(2): 2000187. doi: 10.1002/aisy.202000187
|
| [16] |
MARECHAL L, BALLAND P, LINDENROTH L, et al. Toward a common framework and database of materials for soft robotics[J]. Soft Robotics, 2021, 8(3): 284-297. doi: 10.1089/soro.2019.0115
|
| [17] |
黄建龙, 解广娟, 刘正伟. 基于Mooney-Rivlin模型和Yeoh模型的超弹性橡胶材料有限元分析[J]. 橡胶工业, 2008, 55(8): 467-471. doi: 10.3969/j.issn.1000-890X.2008.08.004
HUANG J L, XIE G J, LIU Z W. FEA of hyperelastic rubber material based on Mooney-Rivlin model and Yeoh model[J]. China Rubber Industry, 2008, 55(8): 467-471 (in Chinese). doi: 10.3969/j.issn.1000-890X.2008.08.004
|

Figures(21)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.




 DownLoad:
DownLoad: