| Citation: | CAI Y,SI Y H,WANG Y Z,et al. Analysis and control of influencing factors of cross coupling of flexible gyro[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(1):141-151 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0968

|
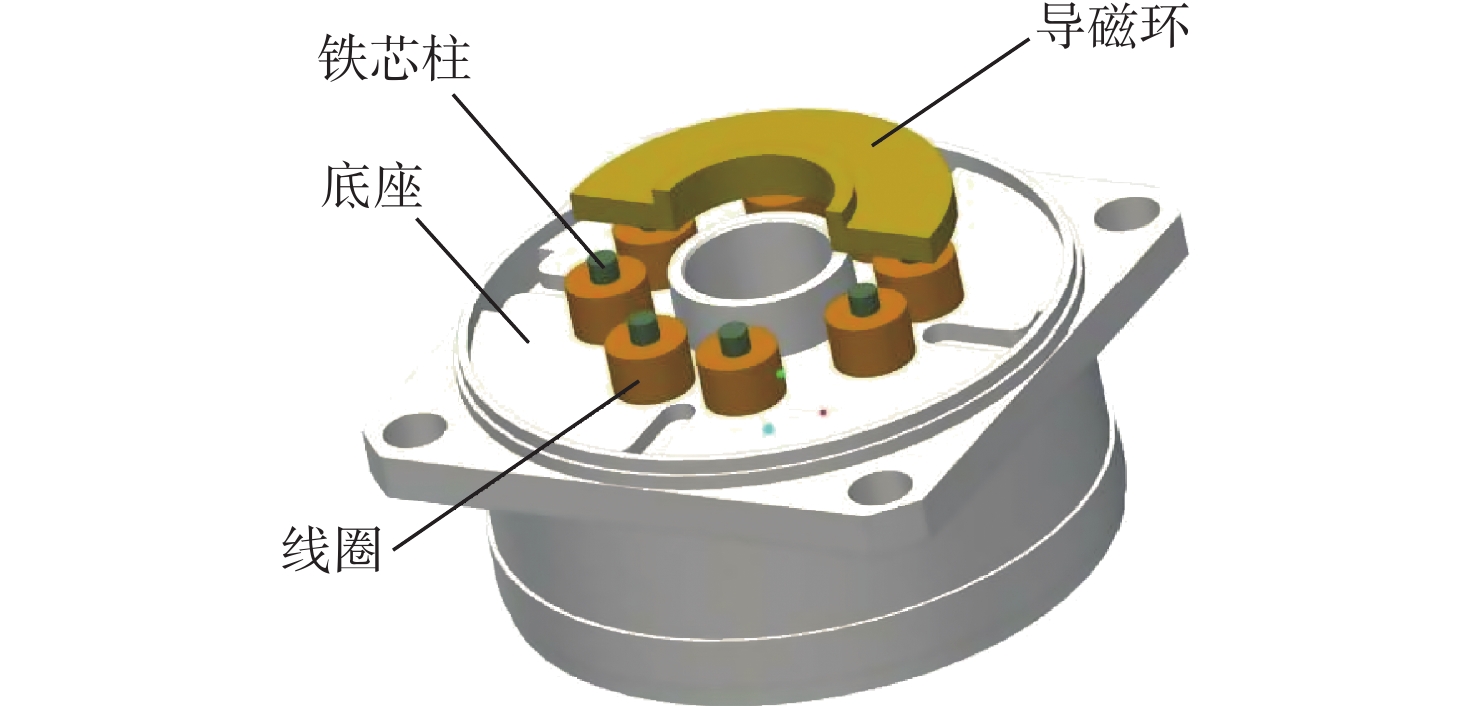
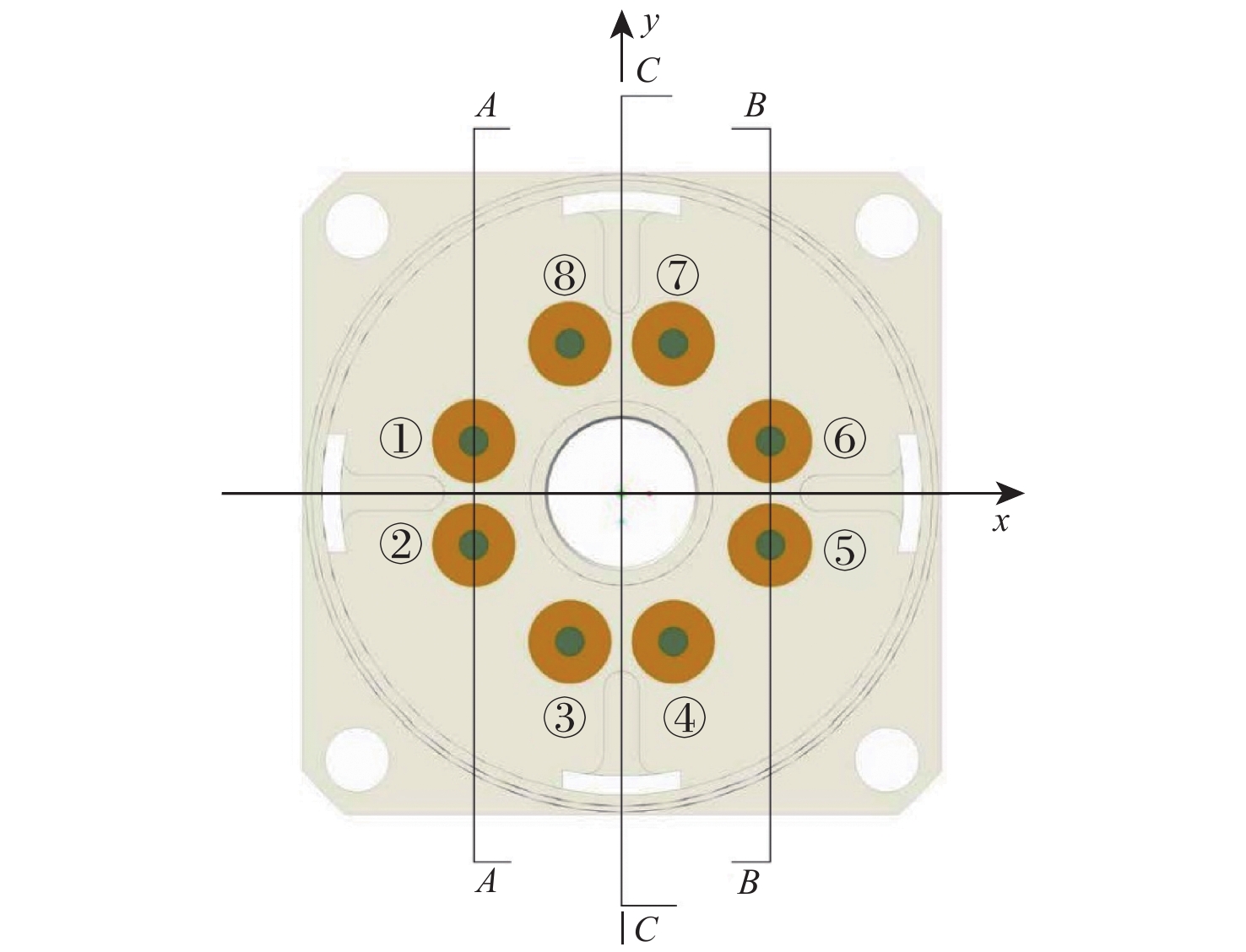
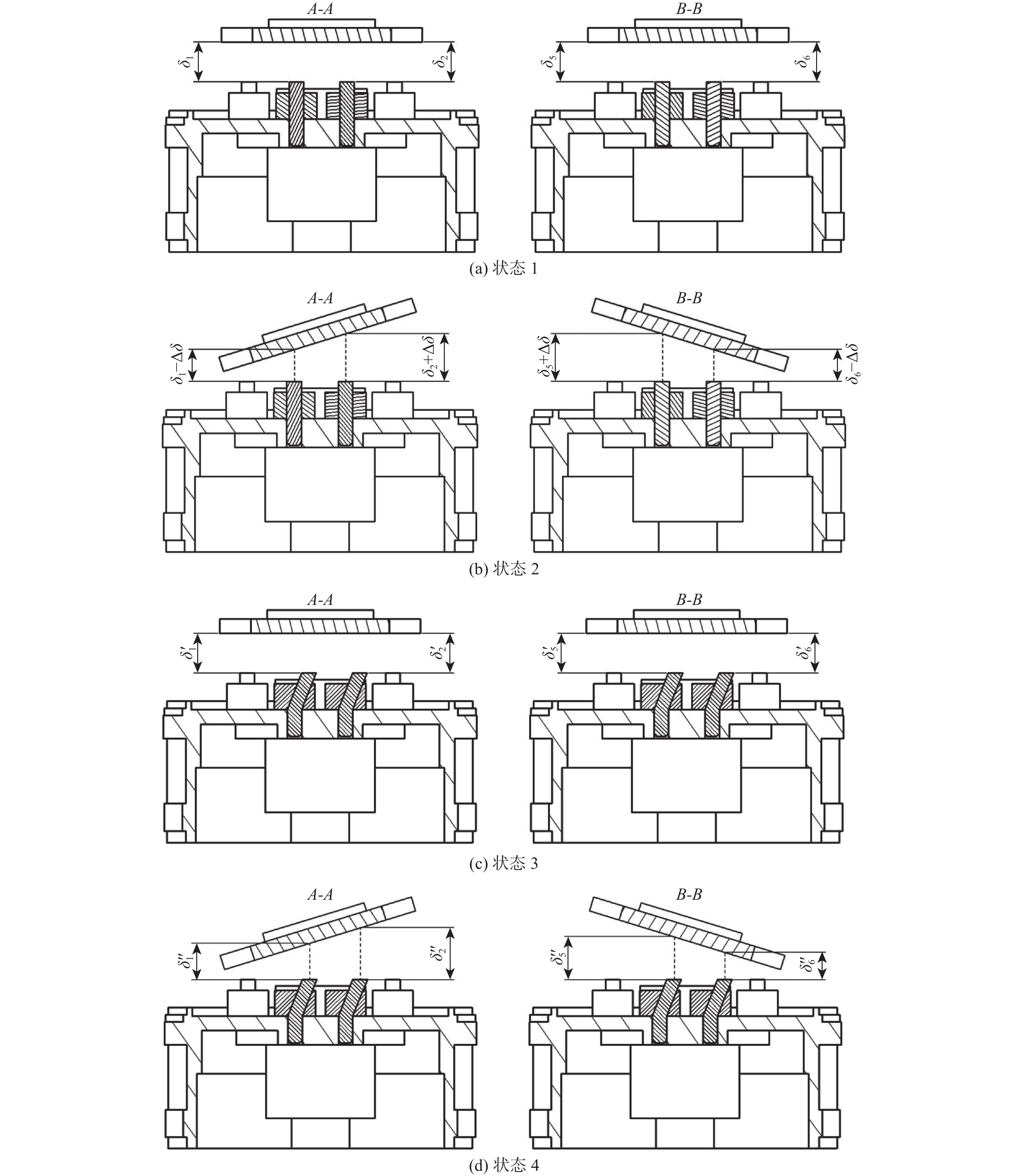
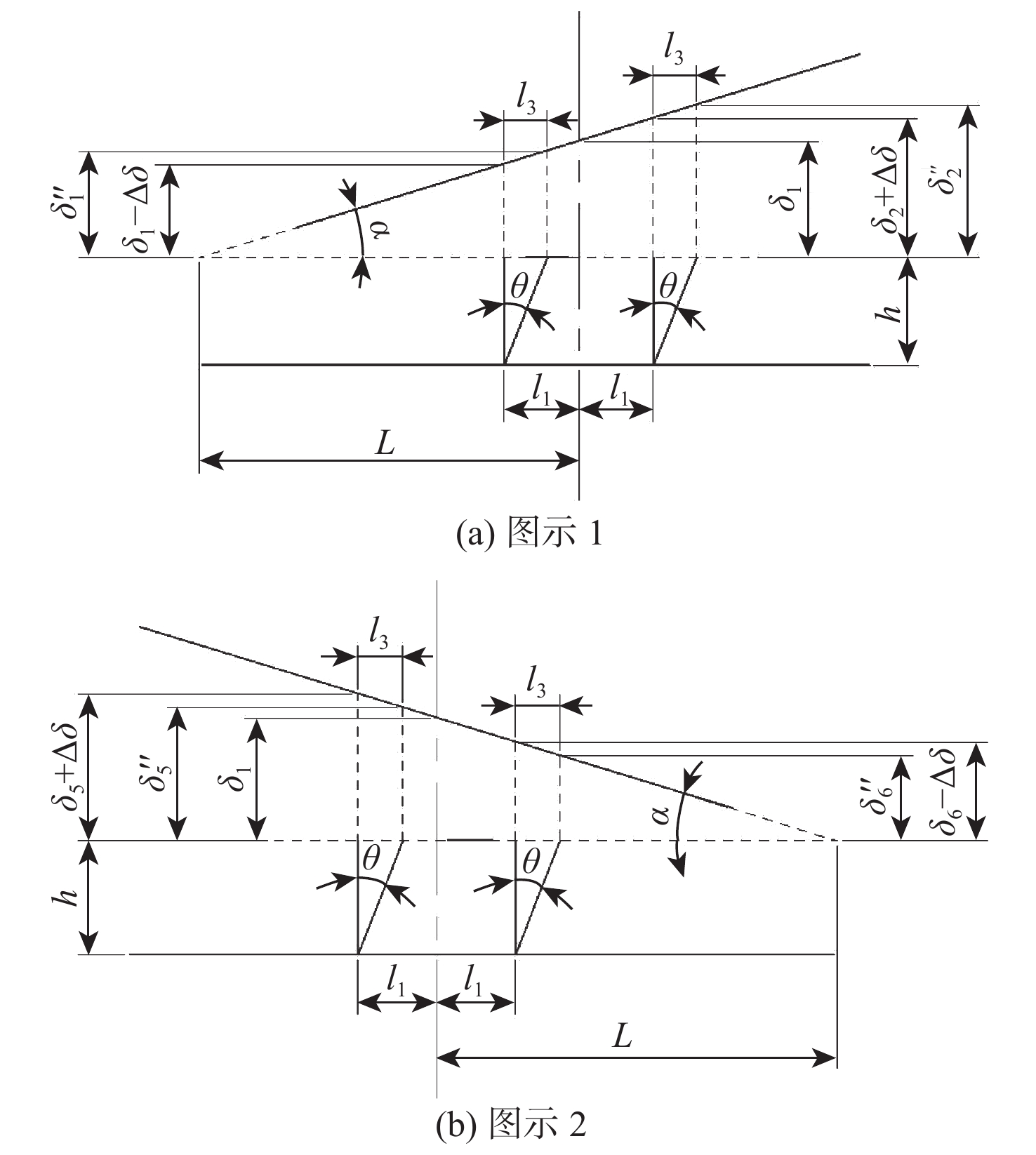
Due to mechanical structure error and electrical interference, the produced flexible gyro has cross coupling. The influencing factors of cross coupling were analyzed, which were positioned as the perpendicularity of the iron core column of the differential inductance sensor and the circumferential deviation angle of the torquer coil. The error models of the sensor and torquer were established, and the influencing degree of each influencing factor on cross coupling was quantitatively analyzed. Precision assembly tools of the iron core column and coil were designed, and an adjustable design of torquer was carried out to control the cross coupling of the flexible gyro. The engineering practice shows that all the control methods achieve good results, and the cross coupling stability control is less than 1%, which has a positive significance for improving the measurement accuracy of the diagonal velocity of the flexible gyro and the navigation accuracy of the inertial navigation system.

| [1] |
荣伟彬, 陈涛, 陈立国, 等. 挠性陀螺十字铰链模型的建立与分析[J]. 光学精密工程, 2006, 14(5): 864-869.
RONG W B, CHEN T, CHEN L G, et al. Establishment and analysis of cross model of flexible gyro[J]. Optics and Precision Engineering, 2006, 14(5): 864-869(in Chinese).
|
| [2] |
张锋. 陀螺转子动平衡校正系统与工艺研究[D]. 大连: 大连理工大学, 2017.
ZHANG F. Research on dynamic balancing calibration system and process of gyro rotor[D]. Dalian: Dalian University of Technology , 2017(in Chinese).
|
| [3] |
熊伟, 丁海山, 付奎生. 陀螺敏感轴交叉耦合对稳定平台角速度的影响分析[J]. 计测技术, 2012, 32(5): 8-12. doi: 10.3969/j.issn.1674-5795.2012.05.003
XIONG W, DING H S, FU K S. Analysis of influence of the cross coupling of gyros sensitive axes on the angular rate of stabilized platform[J]. Metrology & Measurement Technology, 2012, 32(5): 8-12(in Chinese). doi: 10.3969/j.issn.1674-5795.2012.05.003
|
| [4] |
王俊璞, 田蔚风, 金志华, 等. 全姿态挠性陀螺寻北仪误差分析[J]. 仪器仪表学报, 2001, 22(z1): 56-57. doi: 10.3321/j.issn:0254-3087.2001.z1.027
WANG J P, TIAN W F, JIN Z H, et al. Error analysis of all-attitude dynamically tuned gyro strapdown north-seeker[J]. Chinese Journal of Scientific Instrument, 2001, 22(z1): 56-57(in Chinese). doi: 10.3321/j.issn:0254-3087.2001.z1.027
|
| [5] |
陕西航天时代导航设备有限公司. 一种挠性陀螺交叉耦合补偿电路: CN 215639490 U[P]. 2022-01-25.
Shaanxi Aerospace Times Navigation Equipment Co. , Ltd. The invention relates to a flexible gyro cross-coupling compensation circuit: CN 215639490 U [P]. 2022-01-25(in Chinese).
|
| [6] |
张连超, 范世珣, 范大鹏, 等. 动力调谐陀螺再平衡回路数字化的研究与实现[J]. 光学 精密工程, 2007, 15(12): 1974-1981.
ZHANG L C, FAN S X, FAN D P, et al. Research and implementation of digital control of dynamically tuned gyroscope rebalance loop[J]. Optics and Precision Engineering, 2007, 15(12): 1974-1981(in Chinese).
|
| [7] |
LIU S X, LU T Y, SHANG T, et al. Dynamic modeling and coupling characteristic analysis of two-axis rate gyro seeker[J]. International Journal of Aerospace Engineering, 2018, 2018: 8513684.
|
| [8] |
西安航天三沃机电设备有限责任公司. 一种惯性测量单元陀螺位置补偿方法: CN112683303B[P]. 2022-12-06.
Xi’an Aerospace Sanwo Electromechanical Equipment Co. , Ltd. An inertial measurement unit gyro position compensation method: CN112683303B[P]. 2022-12-06(in Chinese).
|
| [9] |
周百令, 胡永华, 王寿荣. ANSYS在挠性陀螺仪温度场分布分析中的应用[J]. 中国惯性技术学报, 2000, 8(4): 89-92. doi: 10.3969/j.issn.1005-6734.2000.04.019
ZHOU B L, HU Y H, WANG S R. Application of ANSYS on the analysis of dynamically tuned gyro temperature field[J]. Journal of Chinese Inertial Technology, 2000, 8(4): 89-92(in Chinese). doi: 10.3969/j.issn.1005-6734.2000.04.019
|
| [10] |
吴瑾颖, 刘光斌. 力学复合环境下挠性陀螺仪的动力学分析[J]. 中国惯性技术学报, 2006, 14(5): 58-61. doi: 10.3969/j.issn.1005-6734.2006.05.016
WU J Y, LIU G B. Dynamics analysis for dynamically tuned gyro under overload-vibration[J]. Journal of Chinese Inertial Technology, 2006, 14(5): 58-61(in Chinese). doi: 10.3969/j.issn.1005-6734.2006.05.016
|
| [11] |
周政. 基于CompactRIO的动力调谐陀螺仪再平衡回路设计与远程控制方法研究[D]. 天津: 天津大学, 2017.
ZHOU Z. Design and remote control method of dynamically tuned gyroscope rebalancing circuit based on CompactRIO[D]. Tianjin: Tianjin University, 2017(in Chinese).
|
| [12] |
李郴荣, 戴兴安, 陈均瑞, 等. 无人机挠性陀螺传感器仿真模型研究[J]. 传感器与微系统, 2020, 39(5): 54-57.
LI C R, DAI X A, CHEN J R, et al. Research on simulation model for UAV flexible gyroscope sensor[J]. Transducer and Microsystem Technologies, 2020, 39(5): 54-57(in Chinese).
|
| [13] |
贾米娜. 挠性陀螺解耦及数字再平衡技术研究[D]. 太原: 中北大学, 2006.
JIA M N. The study on decoupling and digital rebalance technique of flexibile gyroscope[D]. Taiyuan: North University of China, 2006(in Chinese).
|
| [14] |
王亚辉, 李醒飞, 纪越, 等. 改进极大似然法动力调谐陀螺仪闭环辨识[J]. 纳米技术与精密工程, 2017, 15(6): 499-506.
WANG Y H, LI X F, JI Y, et al. Dynamically tuned gyroscope closed-loop identification based on modified maximum likelihood method[J]. Nanotechnology and Precision Engineering, 2017, 15(6): 499-506(in Chinese).
|
| [15] |
孙殿平, 郭超修, 柴志方, 等. 基于差动电容传感器的阻尼振动研究[J]. 大学物理, 2019, 38(7): 36-38.
SUN D P, GUO C X, CHAI Z F, et al. Research on damped vibration based on differential capacitance sensor[J]. College Physics, 2019, 38(7): 36-38(in Chinese).
|
| [16] |
赵焕玲. 一种双轴差动自感式传感器[J]. 贵州科学, 2020, 38(5): 71-74. doi: 10.3969/j.issn.1003-6563.2020.05.018
ZHAO H L. A dual-axis self-induction differential sensor[J]. Guizhou Science, 2020, 38(5): 71-74(in Chinese). doi: 10.3969/j.issn.1003-6563.2020.05.018
|
| [17] |
郑桂隆. 动力调谐陀螺仪力矩器定圈组件制造技术研究[J]. 导航与控制, 2005, 4(3): 69-72.
ZHENG G L. Research on manufacturing technology of dynamic tuning gyroscope torquer[J]. Navigation and Control, 2005, 4(3): 69-72(in Chinese).
|
| [18] |
杨林, 郑保国, 程玲莉, 等. 陀螺力矩器磁场仿真分析及磁路优化设计[J]. 磁性材料及器件, 2022, 53(1): 46-48.
YANG L, ZHENG B G, CHENG L L, et al. Magnetic field simulation analysis and magnetic circuit optimization design of gyro torque[J]. Journal of Magnetic Materials and Devices, 2022, 53(1): 46-48(in Chinese).
|

Figures(13) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: