| Citation: | HUANG X G,WU Y F,LIU D Y. Position analysis of seven-link Barranov truss based on conformal geometric algebra[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(1):265-271 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0961

|
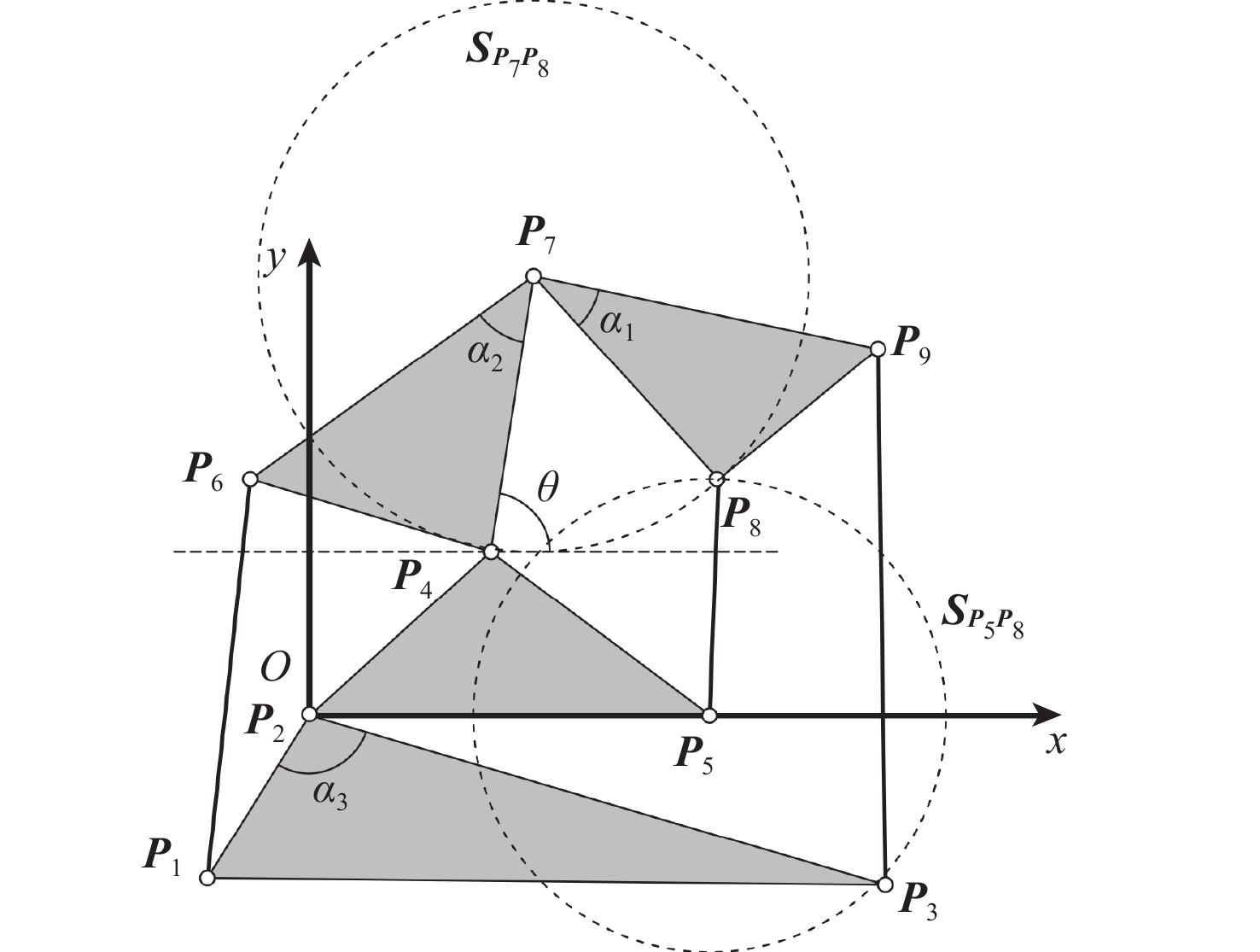
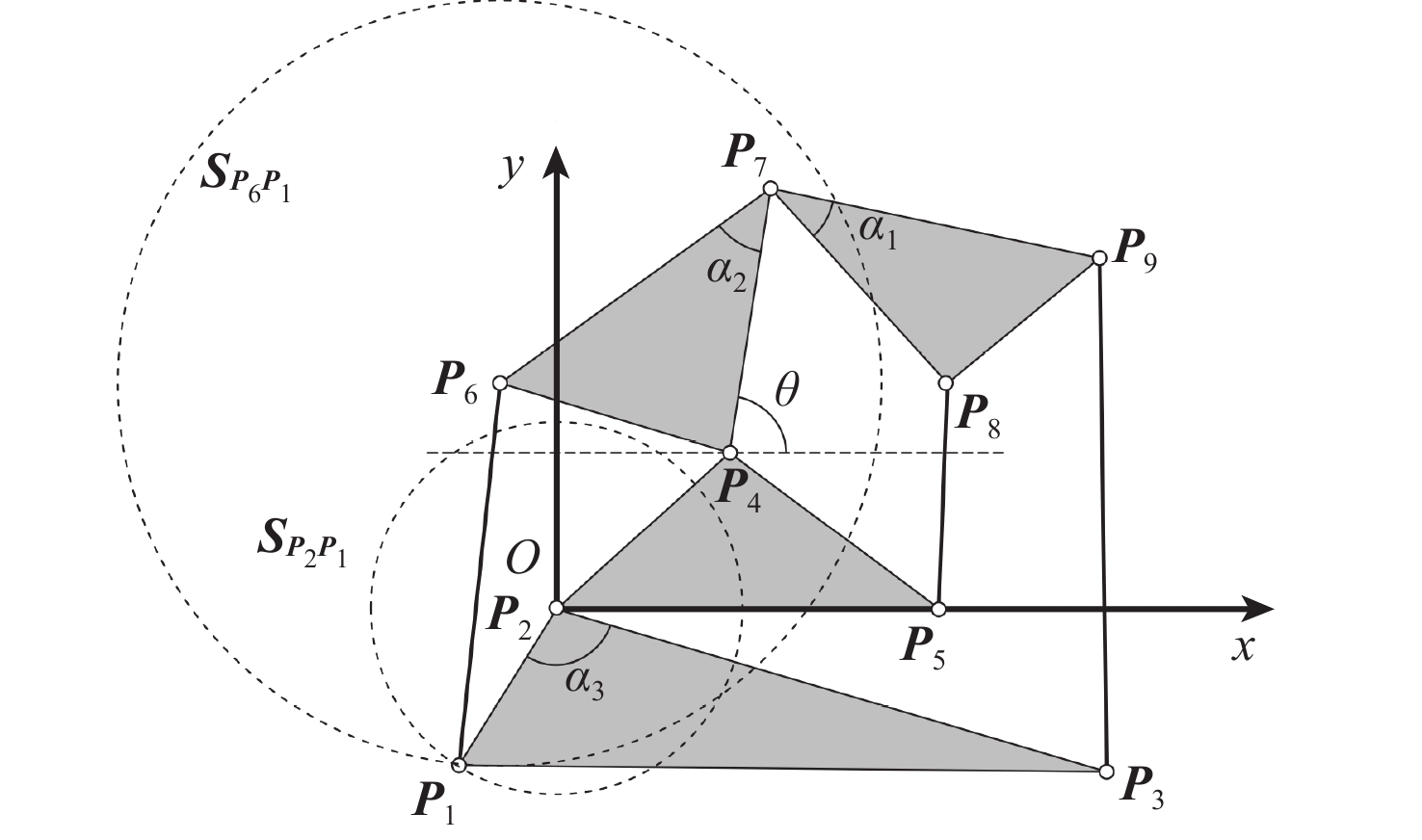
The position analysis of mechanism is the basis of kinematics and dynamics research of mechanism.A conformal geometric algebraic (CGA) method for position analysis of seven-link Barranov truss is proposed to solve the problems of the traditional mechanism position analysis theory, such as the complicated operation of rotating coordinate transformation matrix and the difficulty of solving multivariate nonlinear equations of higher order. The expression of position coordinates of each moving point is established by means of translation, rotation operator and geometric formula expression in CGA. According to the properties of inner product geometry in CGA, the 16-degree position input-output equation of the mechanism and all its solutions are obtained directly. After all the solutions of the higher order equation are substituted back, the position coordinates of all moving points can be obtained. Finally, the effectiveness of the new method is verified by numerical examples.The results show that the geometric intuitionicity of the proposed algorithm is significantly superior to the traditional complex vector method and D-H matrix method. The proposed algorithm can not only avoid matrix operations and elimination operations, but also solve without adding or missing roots.

| [1] |
GRASSMANN H. Die lineale ausdehnungslehre ein neuer zweig der mathematik paperback[M]. New York: Cambridge University Press, 2013.
|
| [2] |
CLIFFORD W K. On the space-theory of matter[M]//CAPEK M. The concepts of space and time. Berlin: Springer, 1976: 295-296.
|
| [3] |
HESTENES D. Grassmann’s legacy[M]//PETSCHE H J, LEWIS A, LIESEN J, et al. From past to future: GraBmann’s work in context. Berlin: Springer, 2011: 243-260.
|
| [4] |
HESTENES D. Old wine in new bottles: A new algebraic framework for computational geometry[M]//CORROCHAND E B, SOBCZYK G. Geometric Algebra with Applications in Science and Engineering. Berlin: Springer, 2001: 3-17.
|
| [5] |
LI H B. Invariant algebras and geometric reasoning[M]. Singarore: World Scientific, 2008.
|
| [6] |
CLIFFORD P. Applications of Grassmann’s extensive algebra[J]. American Journal of Mathematics, 1878, 1(4): 350. doi: 10.2307/2369379
|
| [7] |
LI H B. Ordering in mechanical geometry theorem proving[J]. Science in China Series A: Mathematics, 1997, 40(3): 225-233.
|
| [8] |
HILDENBRAND D, ZAMORA J, BAYRO-CORROCHANO E. Inverse kinematics computation in computer graphics and robotics using conformal geometric algebra[J]. Advances in Applied Clifford Algebras, 2008, 18(3): 699-713.
|
| [9] |
WANG C Q, WU H T, MIAO Q H. Inverse kinematics computation in robotics using conformal geometric algebra[C]//Proceedings of the International Technology and Innovation Conference. London: IET, 2009: 1-5.
|
| [10] |
张立先. 基于几何代数的机构运动学及特性分析[D]. 秦皇岛: 燕山大学, 2008.
ZHANG L X. Kinematics and characteristic analysis of mechanism based on geometric algebra[D]. Qinhuangdao: Yanshan University, 2008(in Chinese).
|
| [11] |
KIM J S, JEONG J H, PARK J H. Inverse kinematics and geometric singularity analysis of a 3-SPS/S redundant motion mechanism using conformal geometric algebra[J]. Mechanism and Machine Theory, 2015, 90: 23-36. doi: 10.1016/j.mechmachtheory.2015.02.009
|
| [12] |
黄昔光, 黄旭. 基于共形几何代数的空间并联机构位置正解[J]. 北京亚洲成人在线一二三四五六区学报, 2017, 43(12): 2377-2381.
HUANG X G, HUANG X. Direct kinematics of a spatial parallel mechanism based on conformal geometric algebra[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(12): 2377-2381(in Chinese).
|
| [13] |
马朝阳. 基于共形几何代数的并联机器人运动学研究[D]. 北京: 北方工业大学, 2019.
MA C Y. Research on kinematics of parallel robot based on conformal geometric algebra[D]. Beijing: North China University of Technology, 2019(in Chinese).
|
| [14] |
HUANG X G, MA C Y, SU H J. A geometric algebra algorithm for the closed-form forward displacement analysis of 3-PPS parallel mechanisms[J]. Mechanism and Machine Theory, 2019, 137: 280-296. doi: 10.1016/j.mechmachtheory.2019.01.035
|
| [15] |
ROJAS N, THOMAS F. Distance-based position analysis of the three seven-link Assur kinematic chains[J]. Mechanism and Machine Theory, 2011, 46(2): 112-126. doi: 10.1016/j.mechmachtheory.2010.10.004
|
| [16] |
INNOCENTI C. Position analysis in analytical form of the 7-link Assur kinematic chain featuring one ternary link connected to ternary links only[J]. Mechanism and Machine Theory, 1997, 32(4): 501-509. doi: 10.1016/S0094-114X(96)00063-8
|
| [17] |
INNOCENTI C. Analytical-form position analysis of the 7-link Assur kinematic chain with four serially-connected ternary links[J]. Journal of Mechanical Design, 1994, 116(2): 622-628. doi: 10.1115/1.2919423
|
| [18] |
INNOCENTI C. Polynomial solution to the position analysis of the 7-link Assur kinematic chain with one quaternary link[J]. Mechanism and Machine Theory, 1995, 30(8): 1295-1303. doi: 10.1016/0094-114X(95)00045-Z
|
| [19] |
王品, 廖启征, 魏世民. 基于吴方法的一种7杆巴氏桁架位移分析研究[J]. 机械科学与技术, 2006, 25(6): 748-752. doi: 10.3321/j.issn:1003-8728.2006.06.030
WANG P, LIAO Q Z, WEI S M. Forward didplacement analysis of a seven-link Barravo truss based on Wu method[J]. Mechanical Science and Technology, 2006, 25(6): 748-752(in Chinese). doi: 10.3321/j.issn:1003-8728.2006.06.030
|
| [20] |
王品, 廖启征, 庄育锋, 等. 9杆巴氏桁架的位移分析[J]. 机械工程学报, 2007, 43(7): 11-15. doi: 10.3321/j.issn:0577-6686.2007.07.003
WANG P, LIAO Q Z, ZHUANG Y F, et al. Displacement analysis of nine-link Barranov truss[J]. Chinese Journal of Mechanical Engineering, 2007, 43(7): 11-15(in Chinese). doi: 10.3321/j.issn:0577-6686.2007.07.003
|
| [21] |
WANG P, LIAO Q Z, ZHUANG Y F, et al. A method for position analysis of a kind of nine-link Barranov truss[J]. Mechanism and Machine Theory, 2007, 42(10): 1280-1288. doi: 10.1016/j.mechmachtheory.2006.11.005
|

Figures(4) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: