| Citation: | TAO J,CAO Y F. UAV obstacle avoidance path-following method under time-varying wind disturbance at low altitudes[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(1):175-182 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0956

|
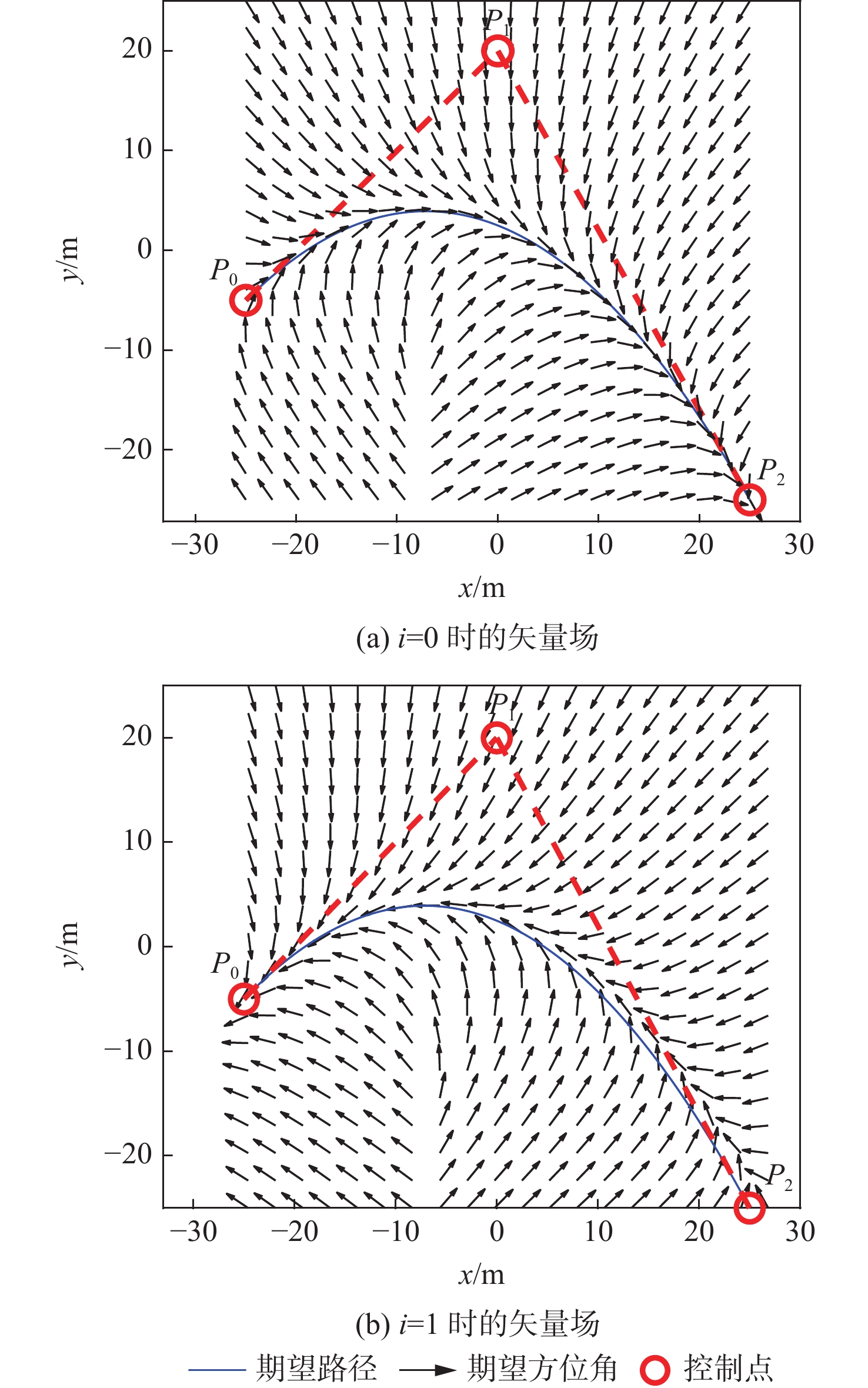
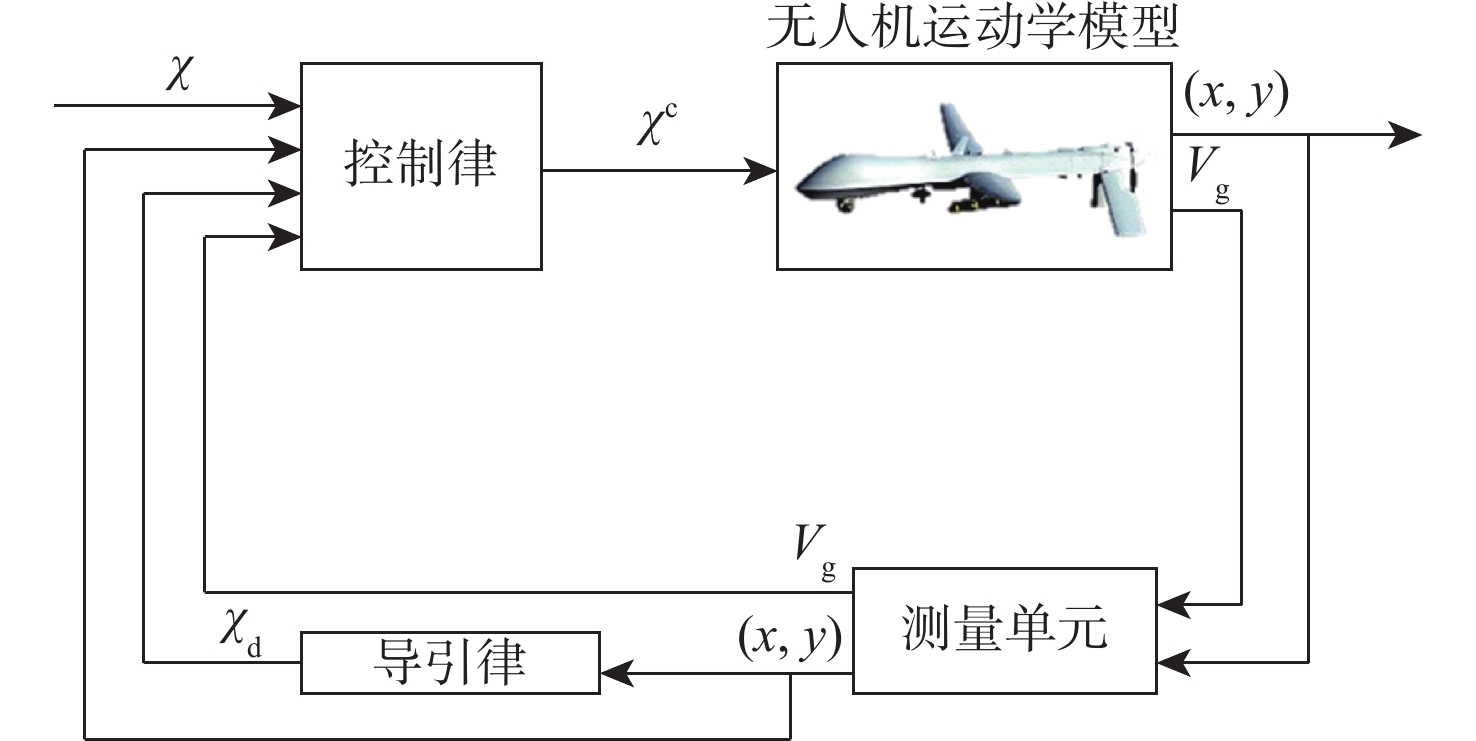
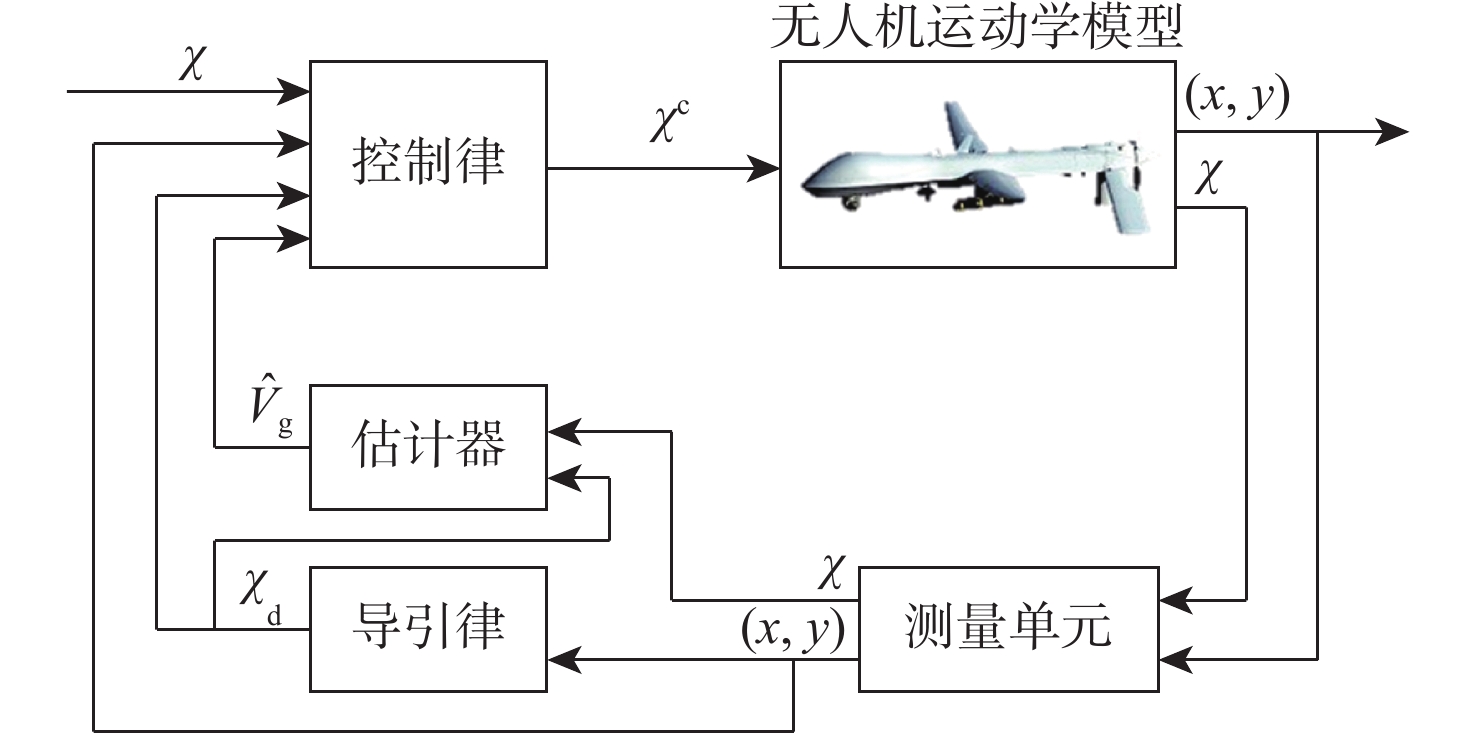
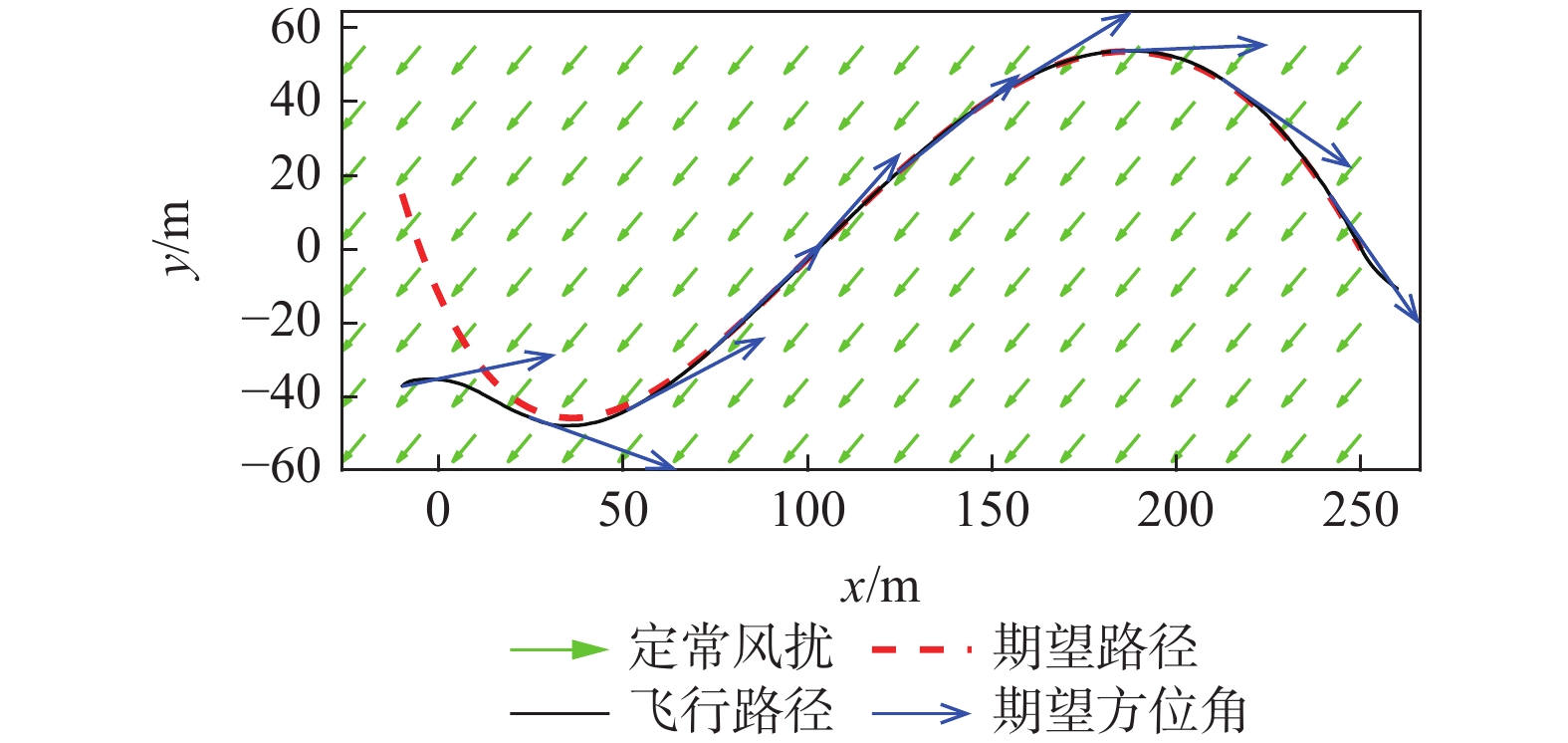
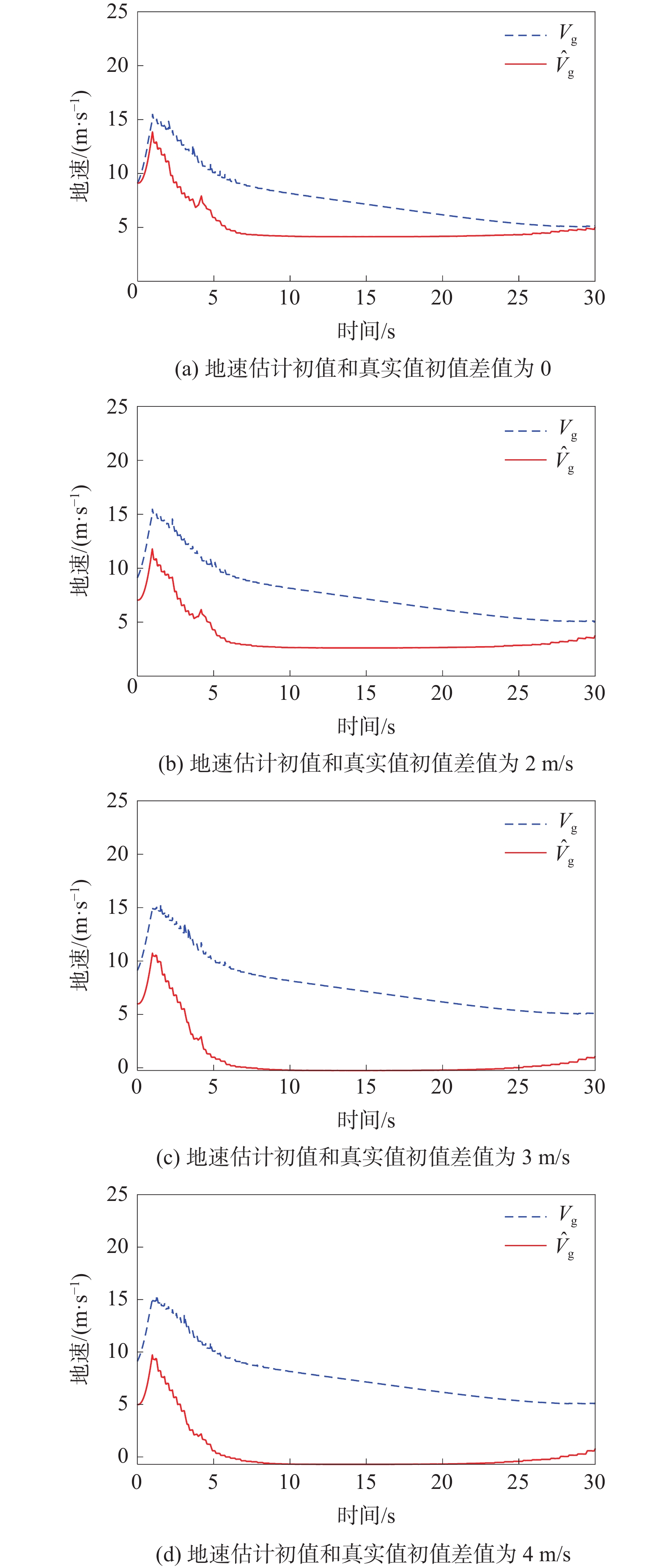
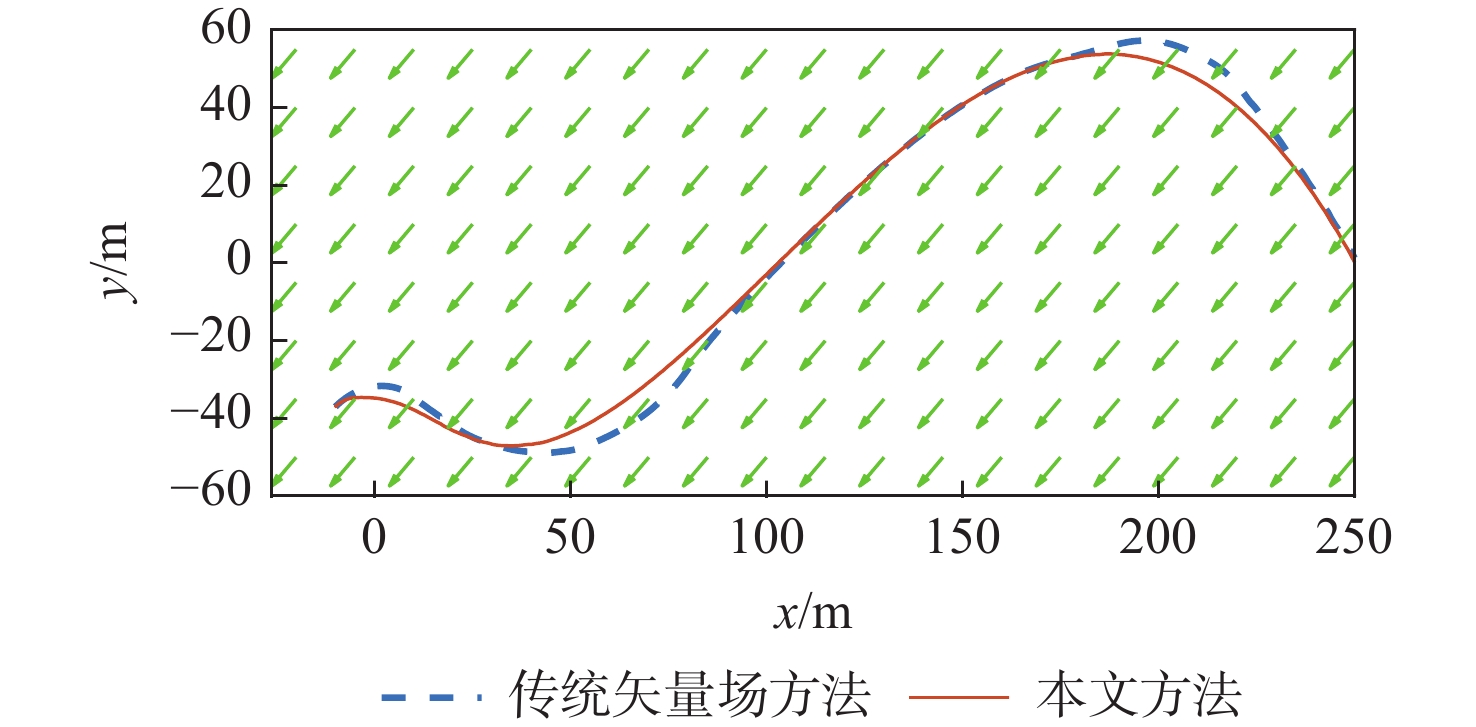
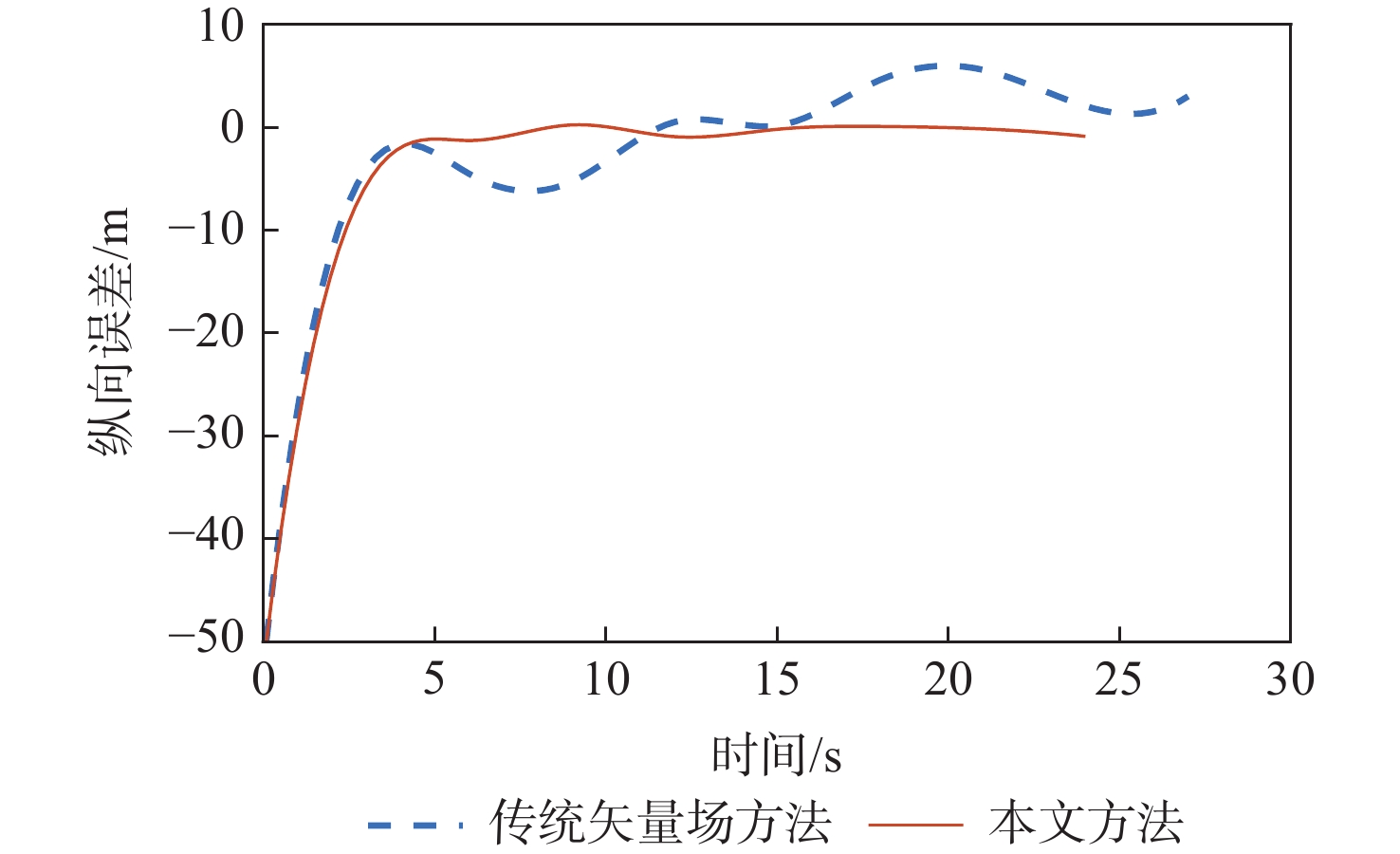
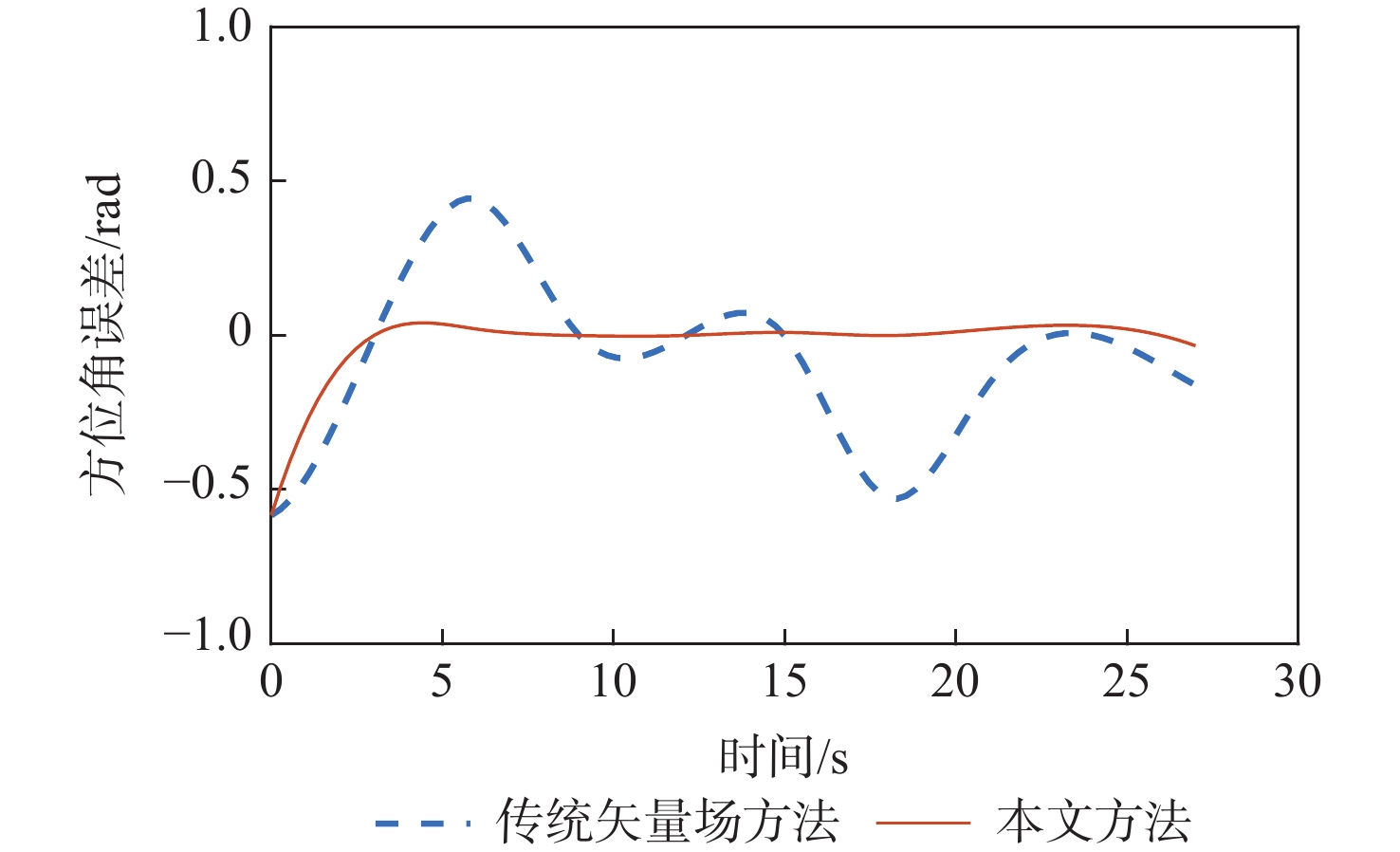
An unmanned aerial vehicle path-following method under unknown time-varying wind disturbance was designed to solve the problem of unmanned aerial vehicle obstacle avoidance path-following at low altitudes. Firstly, a kinematic model of the unmanned aerial vehicle in the two-dimensional plane was given to complete the mathematical modeling of the obstacle avoidance path-following; secondly, a vector field method was used to design the tracking control law for the desired path of the Bessel curve under the unknown time-varying wind disturbance condition, and a ground speed estimator was designed for measuring the ground speed of the unmanned aerial vehicle under the unknown time-varying wind disturbance, and the Liapunov stability of the path-following was analyzed. Finally, a simulation was carried out to verify the Bessel curve’s expected path-following under unknown time-varying wind disturbance. The simulation experiments demonstrate that the designed unmanned aerial vehicle path-following method can achieve stable path-following under the unknown time-varying wind disturbance.

| [1] |
SUJIT P B, SARIPALLI S, SOUSA J B. Unmanned aerial vehicle path following: A survey and analysis of algorithms for fixed-wing unmanned aerial vehicles[J]. IEEE Control Systems Magazine, 2014, 34(1): 42-59.
|
| [2] |
YAMAGUCHI T, FEINGOLD G, KAZIL J. Aerosol cloud inter-actions in trade wind cumulus clouds and the role of vertical wind shear[J]. Journal of Geophysical Research: Atmospheres, 2019, 124(22): 12244-12261. doi: 10.1029/2019JD031073
|
| [3] |
ZHOU B Y, SATYAVADA H, BALDI S. Adaptive path following for unmanned aerial vehicles in time-varying unknown wind environments[C]//Proceedings of the American Control Conference. Piscataway: IEEE Press, 2017: 1127-1132.
|
| [4] |
PALOMAKI R T, ROSE N T, VAN DEN BOSSCHE M, et al. Wind estimation in the lower atmosphere using multirotor aircraft[J]. Journal of Atmospheric and Oceanic Technology, 2017, 34(5): 1183-1191. doi: 10.1175/JTECH-D-16-0177.1
|
| [5] |
O'CONNOR A, KEARNEY D. Low level turbulence detection for airports[J]. International Journal of Aviation, Aeronautics, and Aerospace, 2019, 6(1): 3.
|
| [6] |
CHEN Q Y, LU Y F. An improved nonlinear path following method with on-line transition trajectory generation for fixed-wing unmanned aerial vehicles[J]. International Journal of Advanced Robotic Systems, 2022, 19(3): 1-16.
|
| [7] |
WANG Y J, WANG X K, SHEN L C. Approximate optimal curve path tracking control for nonlinear systems with asymmetric input constraints[J]. Drones, 2022, 6(11): 319.
|
| [8] |
SILVA G B, PAIVA L T, FONTES F A C C. A path-following guidance method for airborne wind energy systems with large domain of attraction[C]//Proceedings of the American Control Conference. Piscataway: IEEE Press, 2019: 2771-2776.
|
| [9] |
BACK S, CHO G, OH J, et al. Autonomous UAV trail navigation with obstacle avoidance using deep neural networks[J]. Journal of Intelligent & Robotic Systems, 2020, 100(3): 1195-1211.
|
| [10] |
ZHANG Y T, ZHANG Y M, YU Z Q. Path following control for UAV using deep reinforcement learning approach[J]. Guidance, Navigation and Control, 2021, 1(1): 2150005. doi: 10.1142/S2737480721500059
|
| [11] |
YANG J, LIU C J, COOMBES M, et al. Optimal path following for small fixed-wing UAVs under wind disturbances[J]. IEEE Transactions on Control Systems Technology, 2021, 29(3): 996-1008. doi: 10.1109/TCST.2020.2980727
|
| [12] |
WILHELM J P, CLEM G. Vector field UAV guidance for path following and obstacle avoidance with minimal deviation[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(8): 1848-1856. doi: 10.2514/1.G004053
|
| [13] |
ZHANG Z, LIU X, FENG B. Research on obstacle avoidance path planning of UAV in complex environments based on improved Bézier curve[J]. Scientific Reports, 2023, 13(1): 16453.
|
| [14] |
CHOI J, CURRY R, ELKAIM G. Path planning based on bézier curve for autonomous ground vehicles[C]//Proceedings of the Advances in Electrical and Electronics Engineering-IAENG Special Edition of the World Congress on Engineering and Computer Science. Piscataway: IEEE Press, 2008: 158-166.
|
| [15] |
NELSON D R, BARBER D B, MCLAIN T W, et al. Vector field path following for miniature air vehicles[J]. IEEE Transactions on Robotics, 2007, 23(3): 519-529.
|

Figures(11) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: