| Citation: | MA Z W,BAI H,CHEN H B,et al. RBF neural network robust adaptive control of quadrotor aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1620-1628 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0595

|
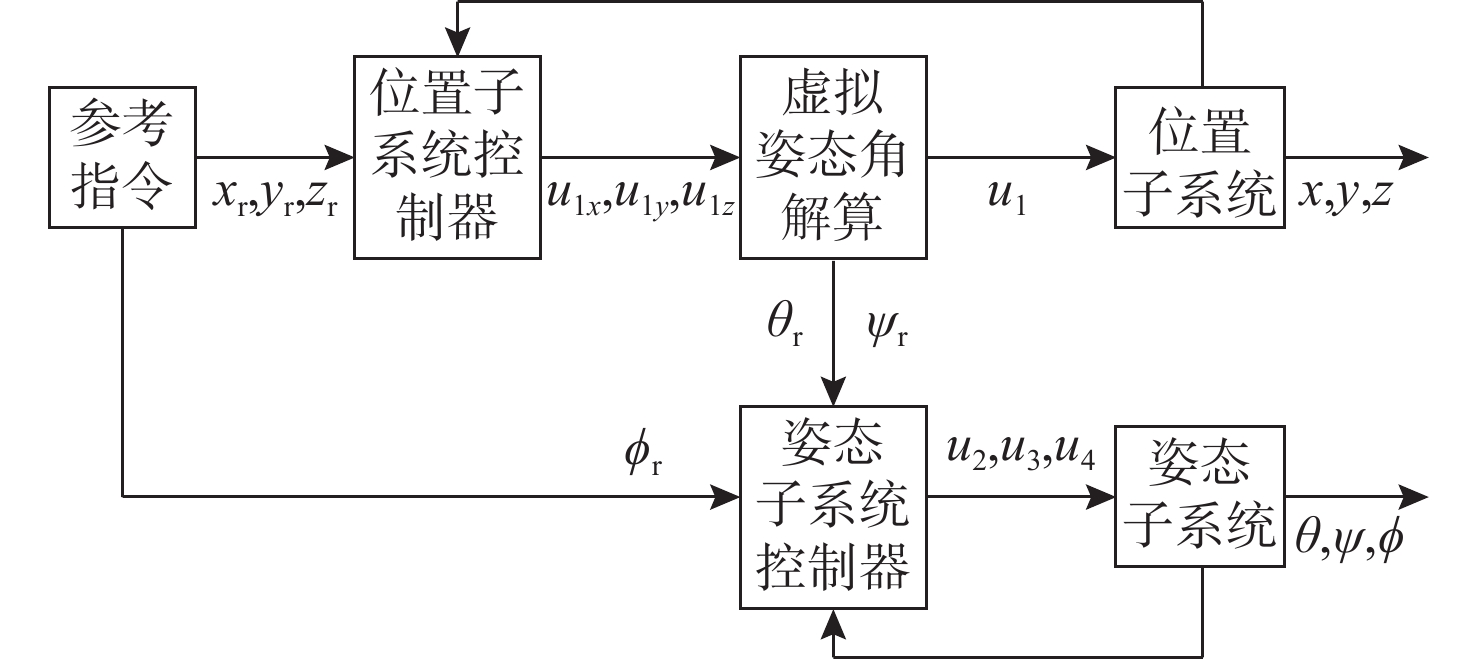
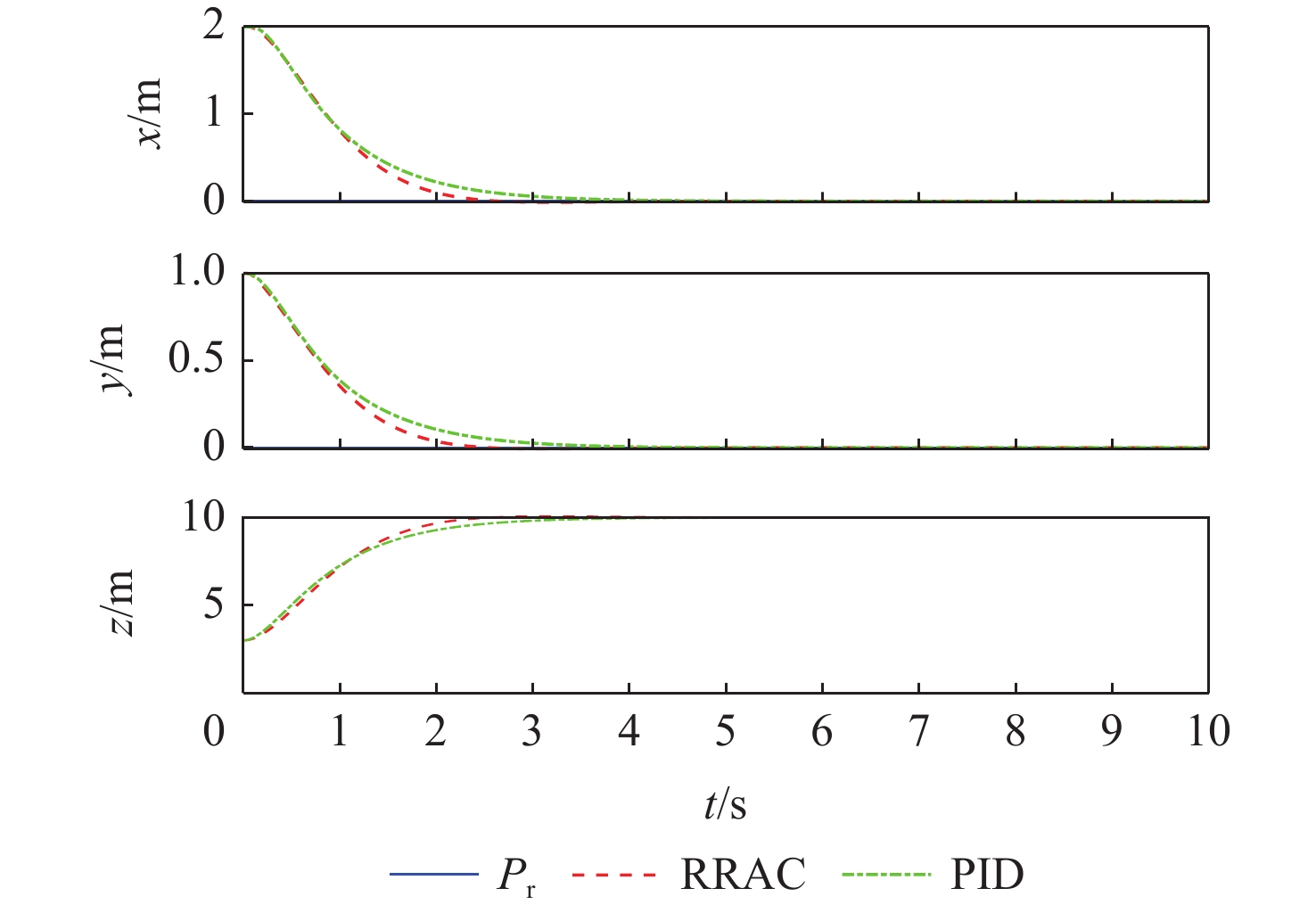
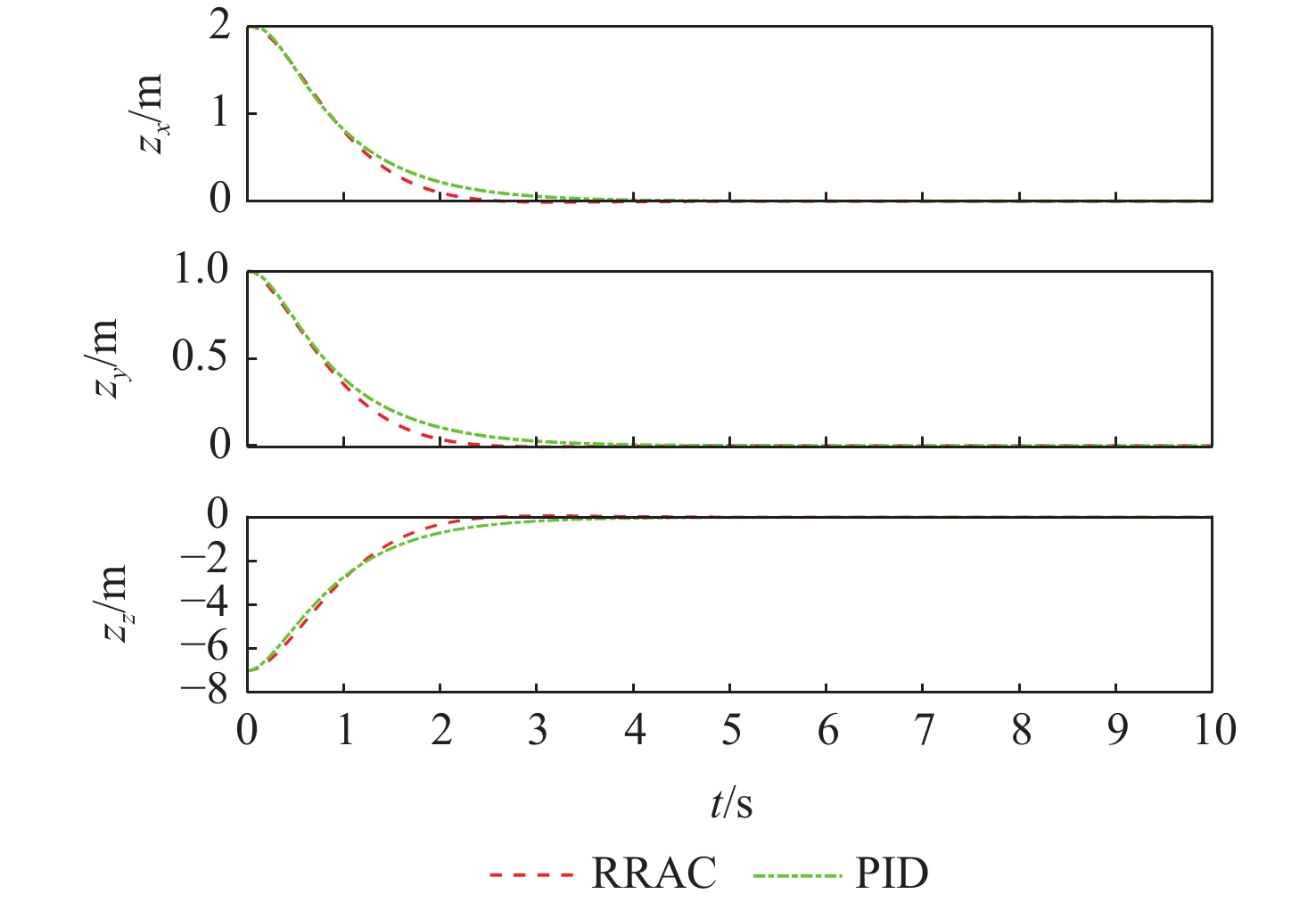
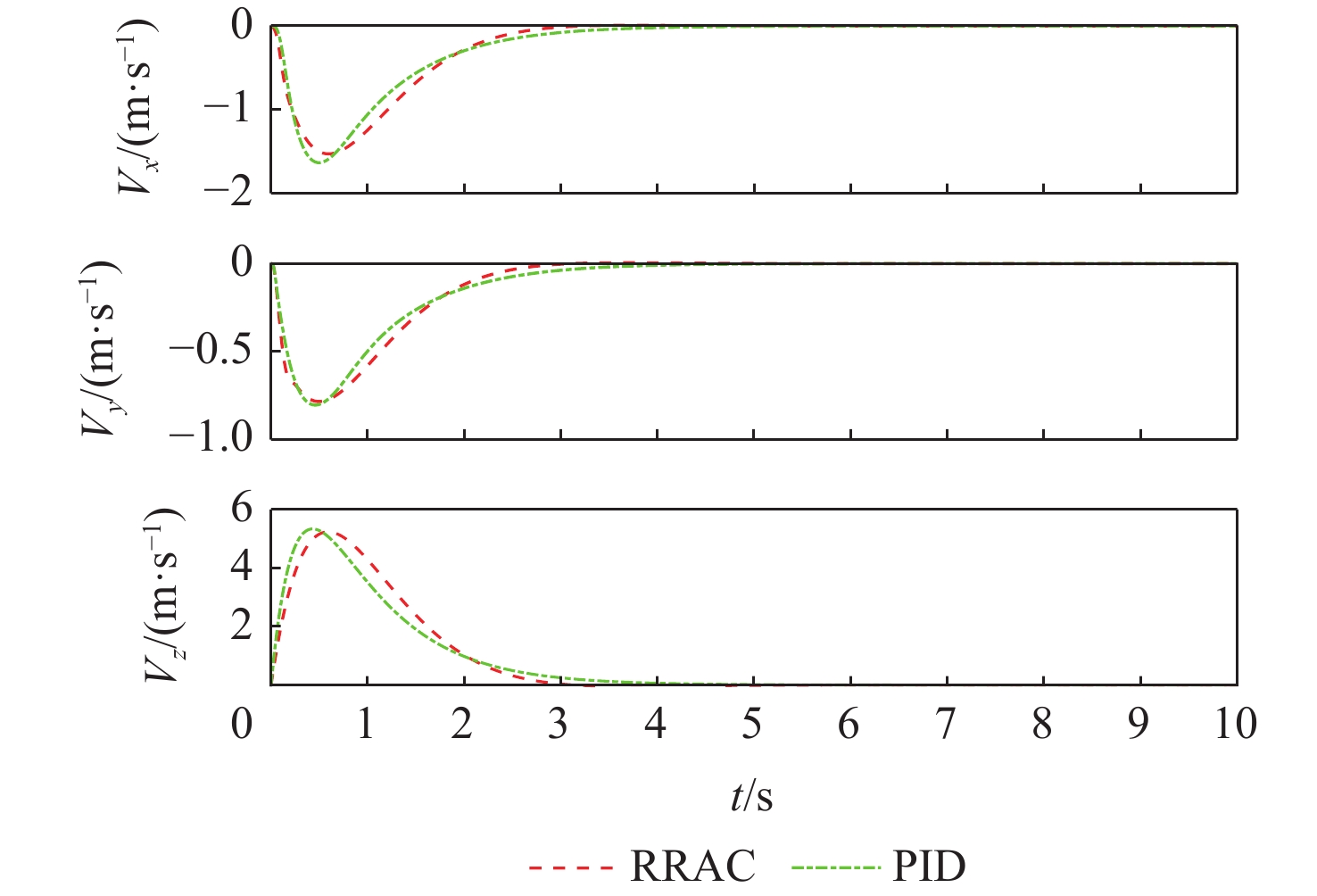
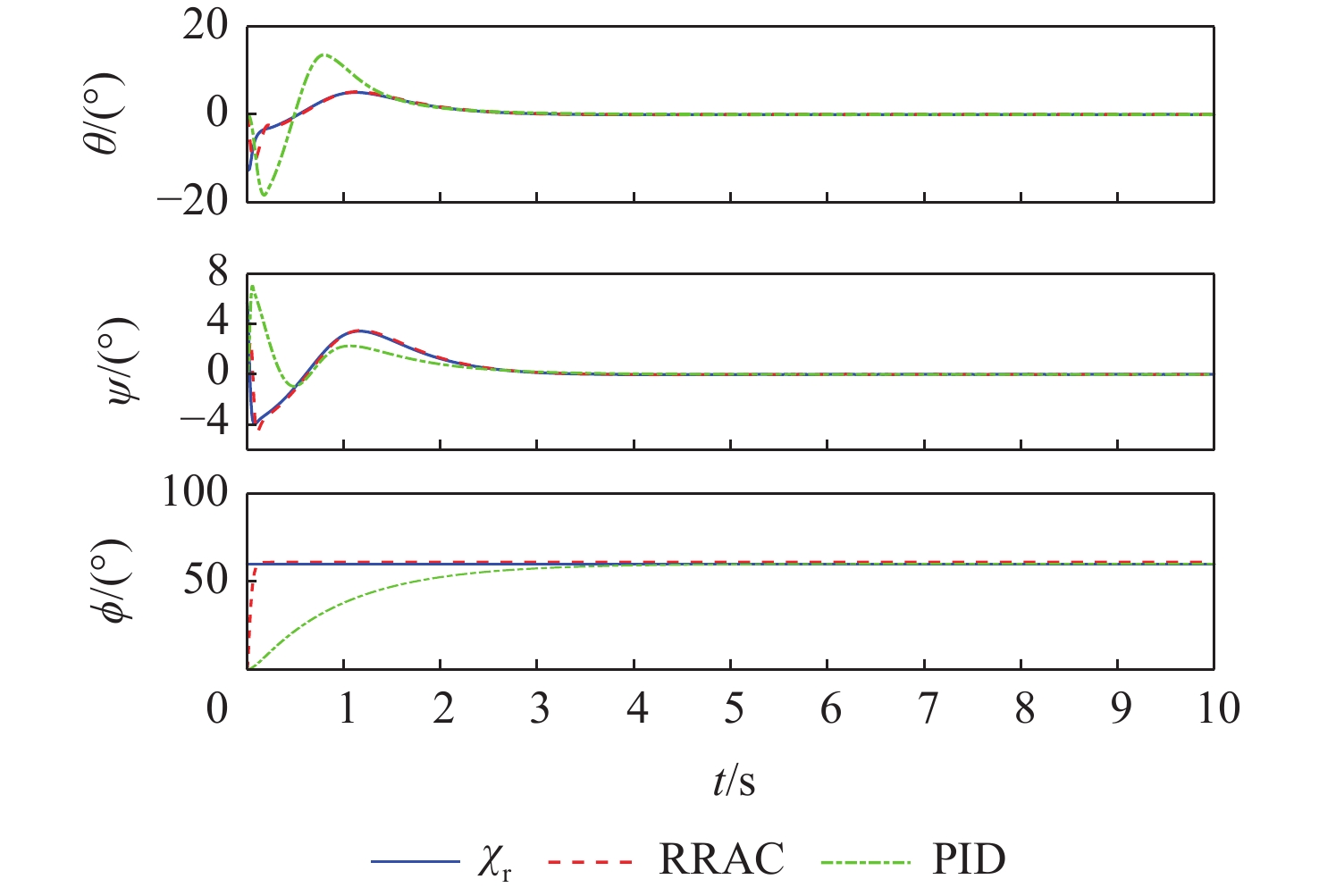
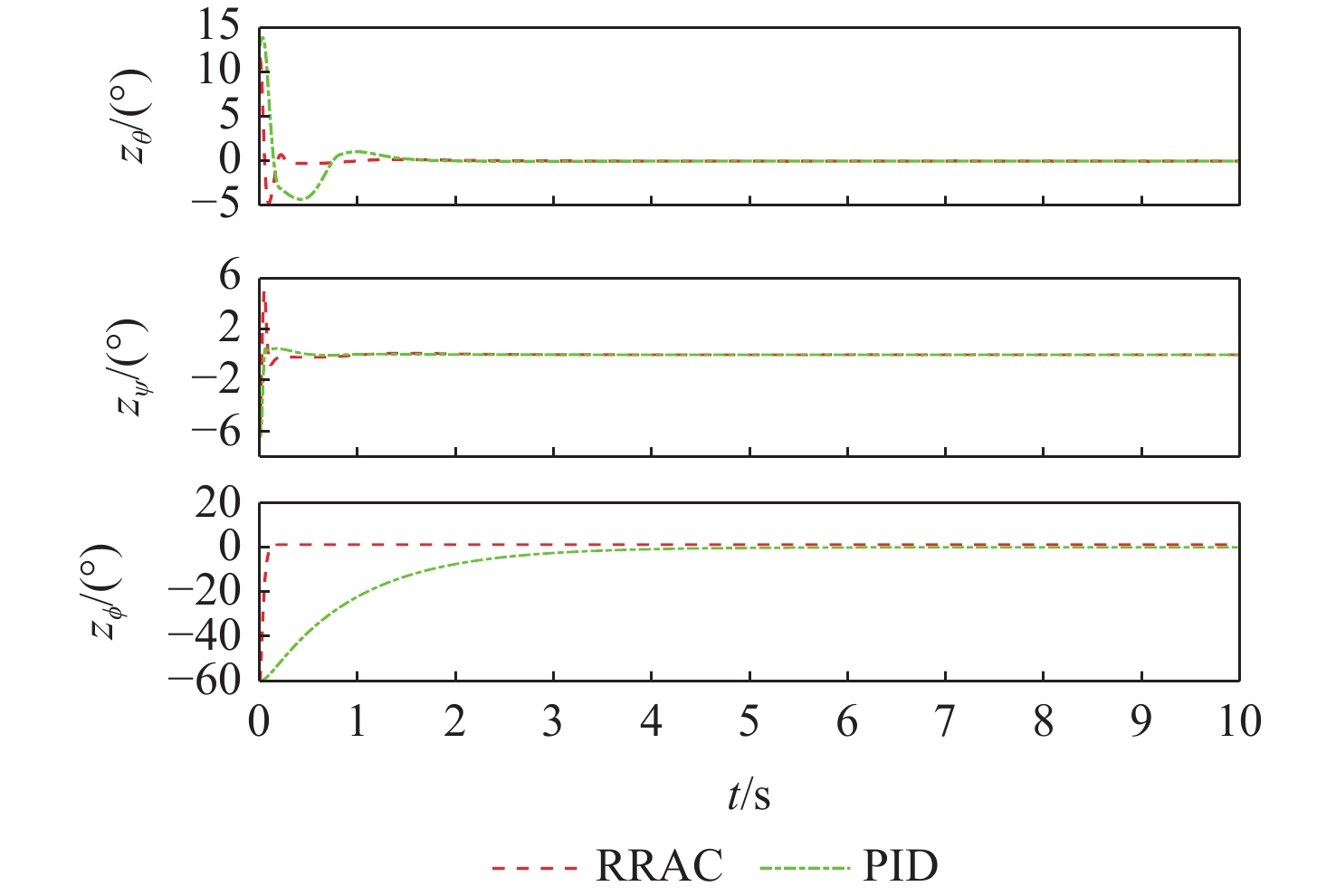
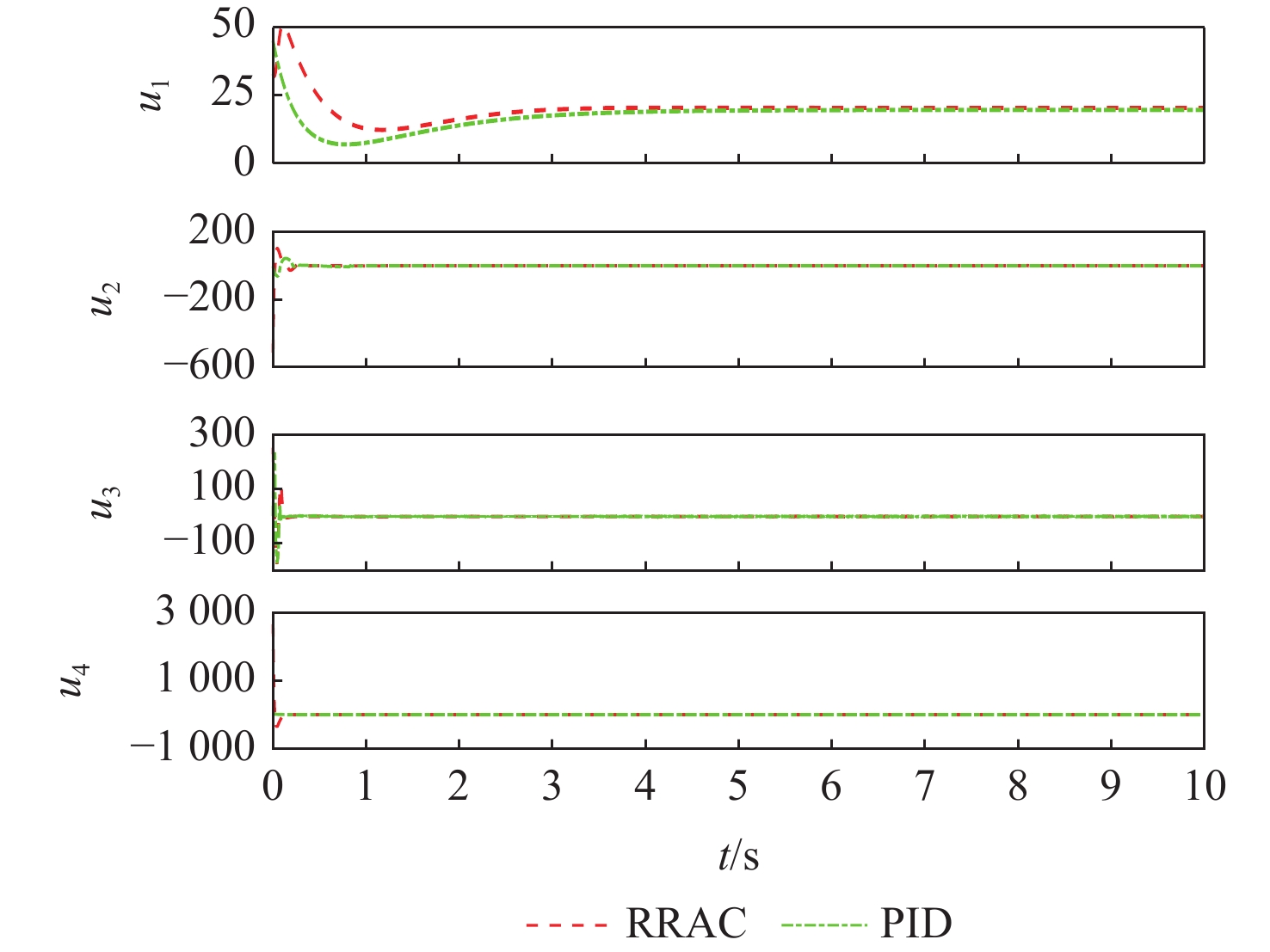
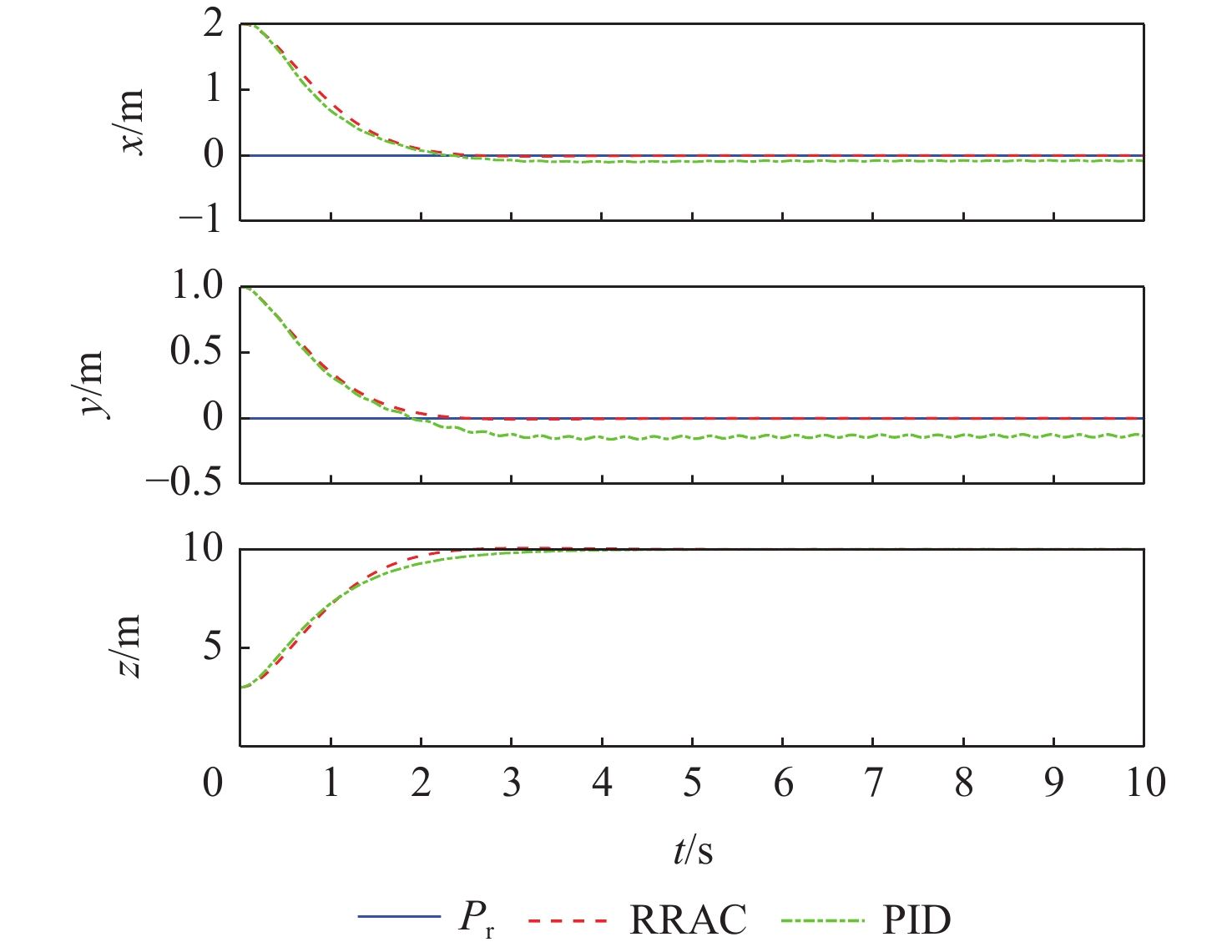
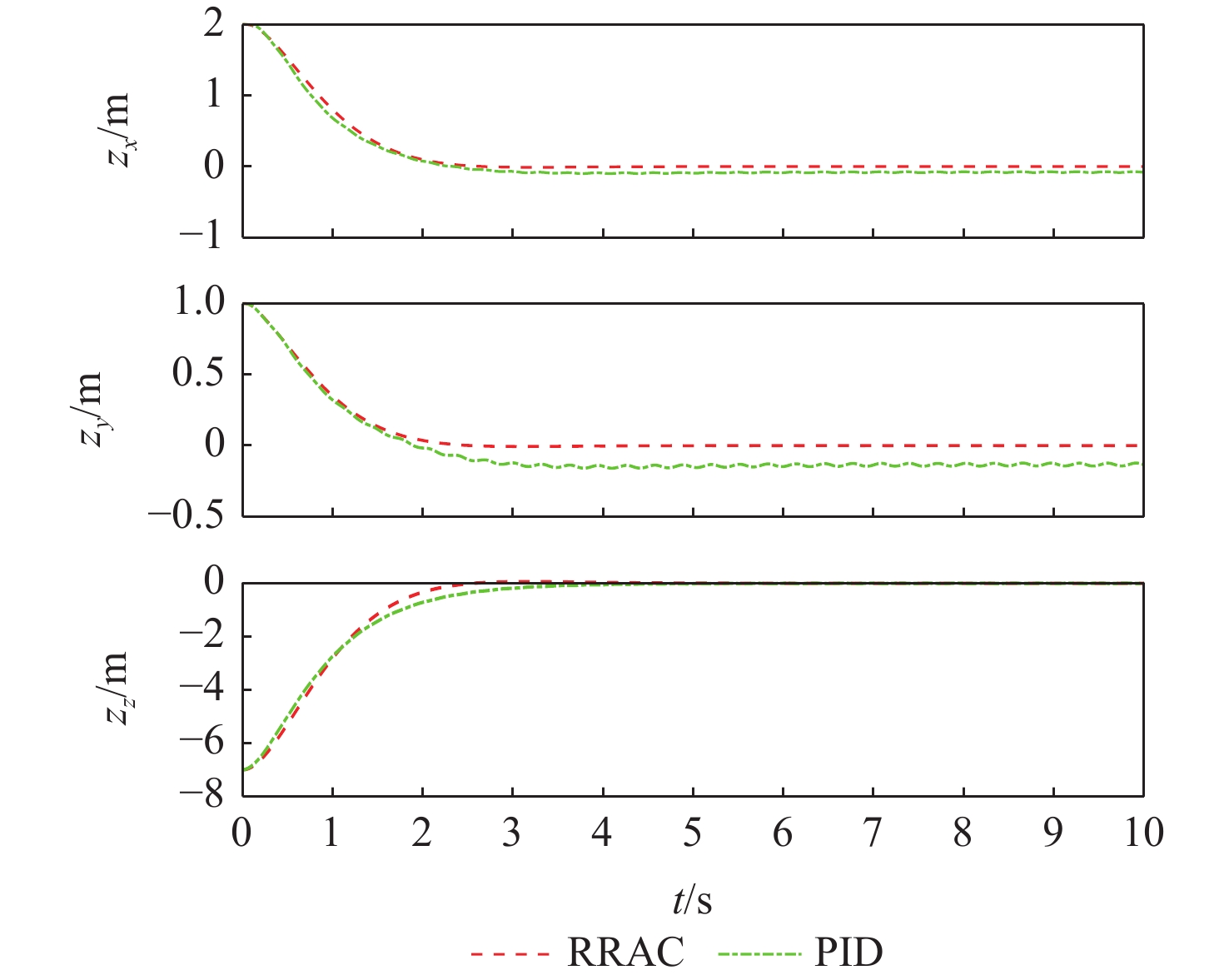
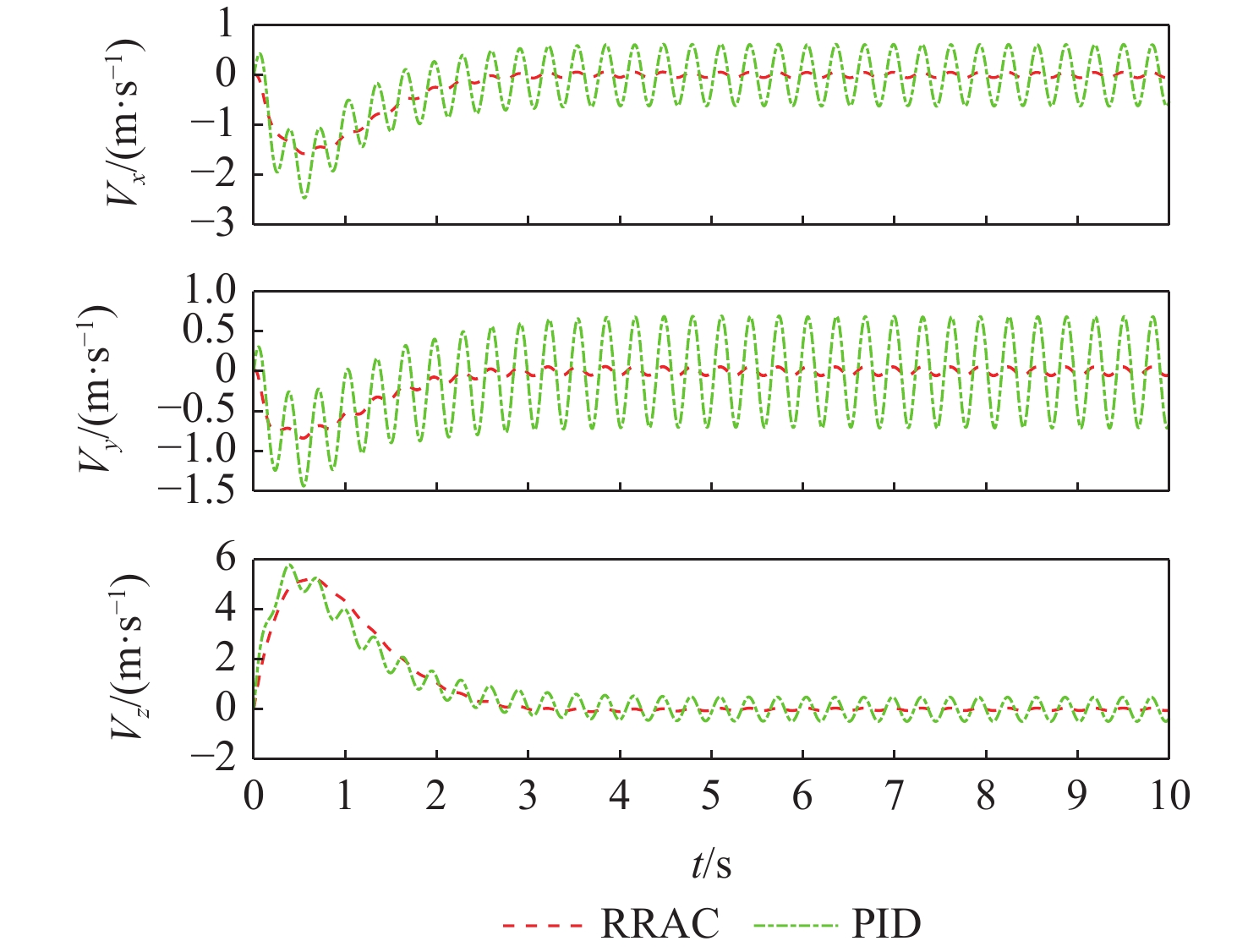
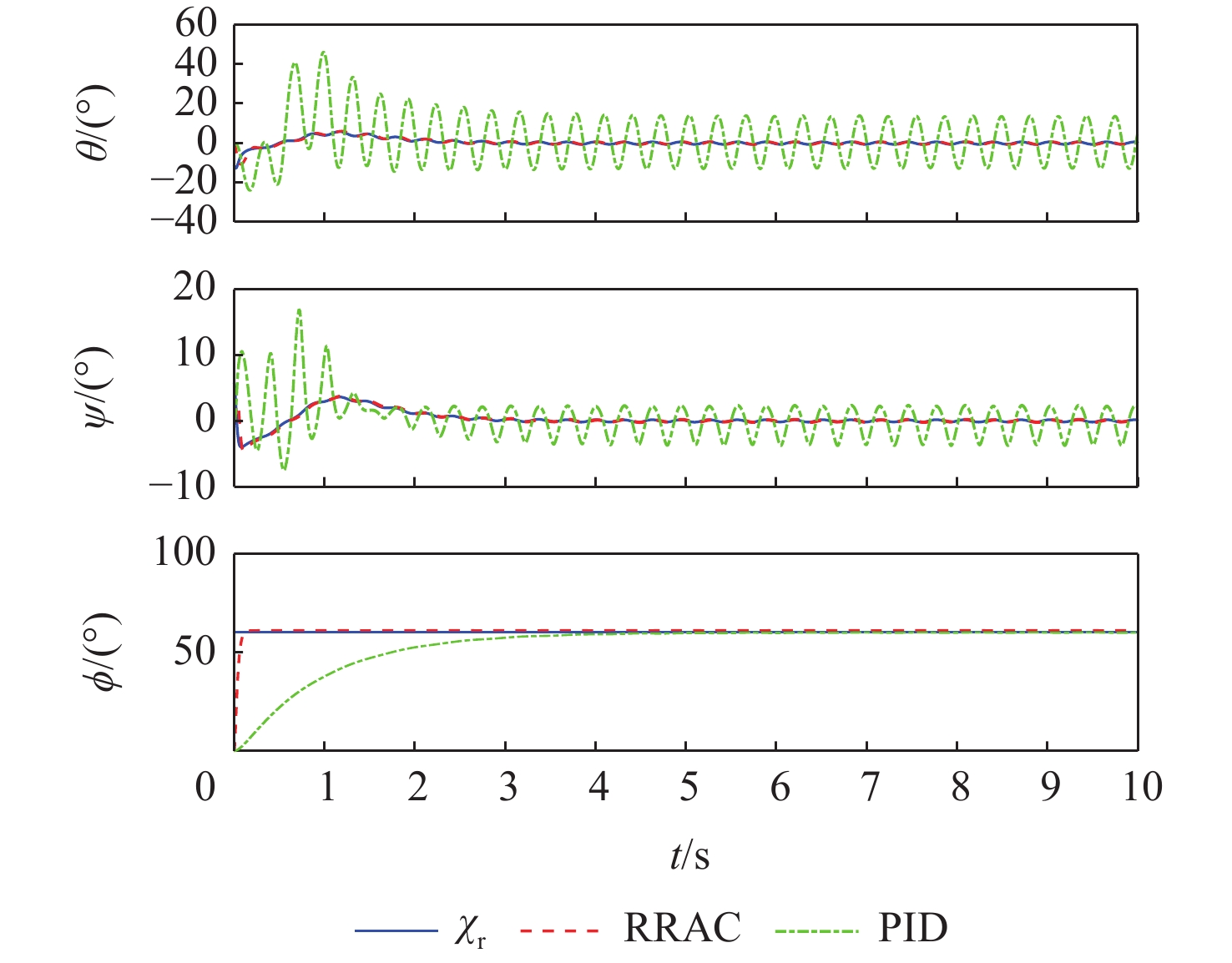
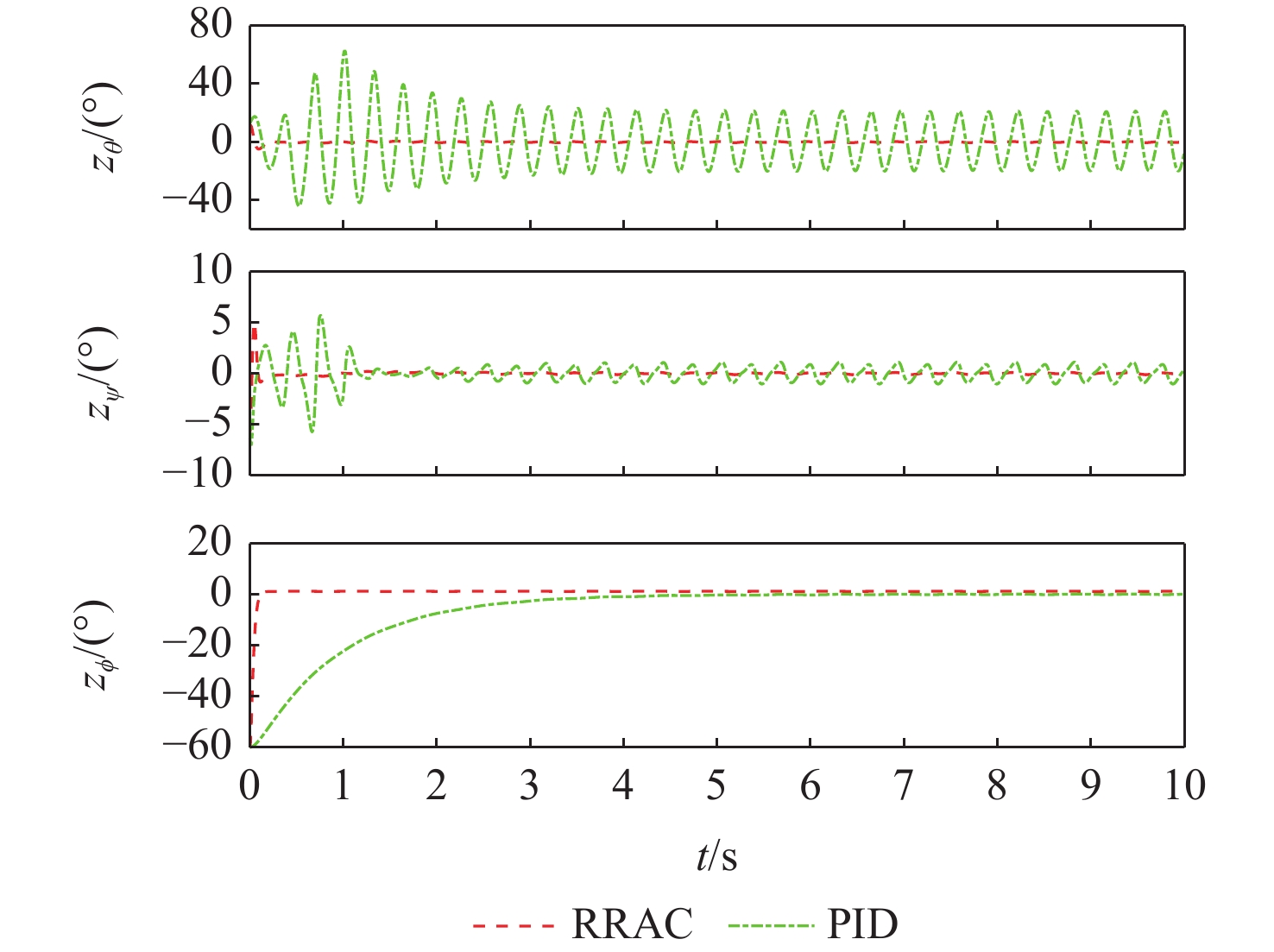
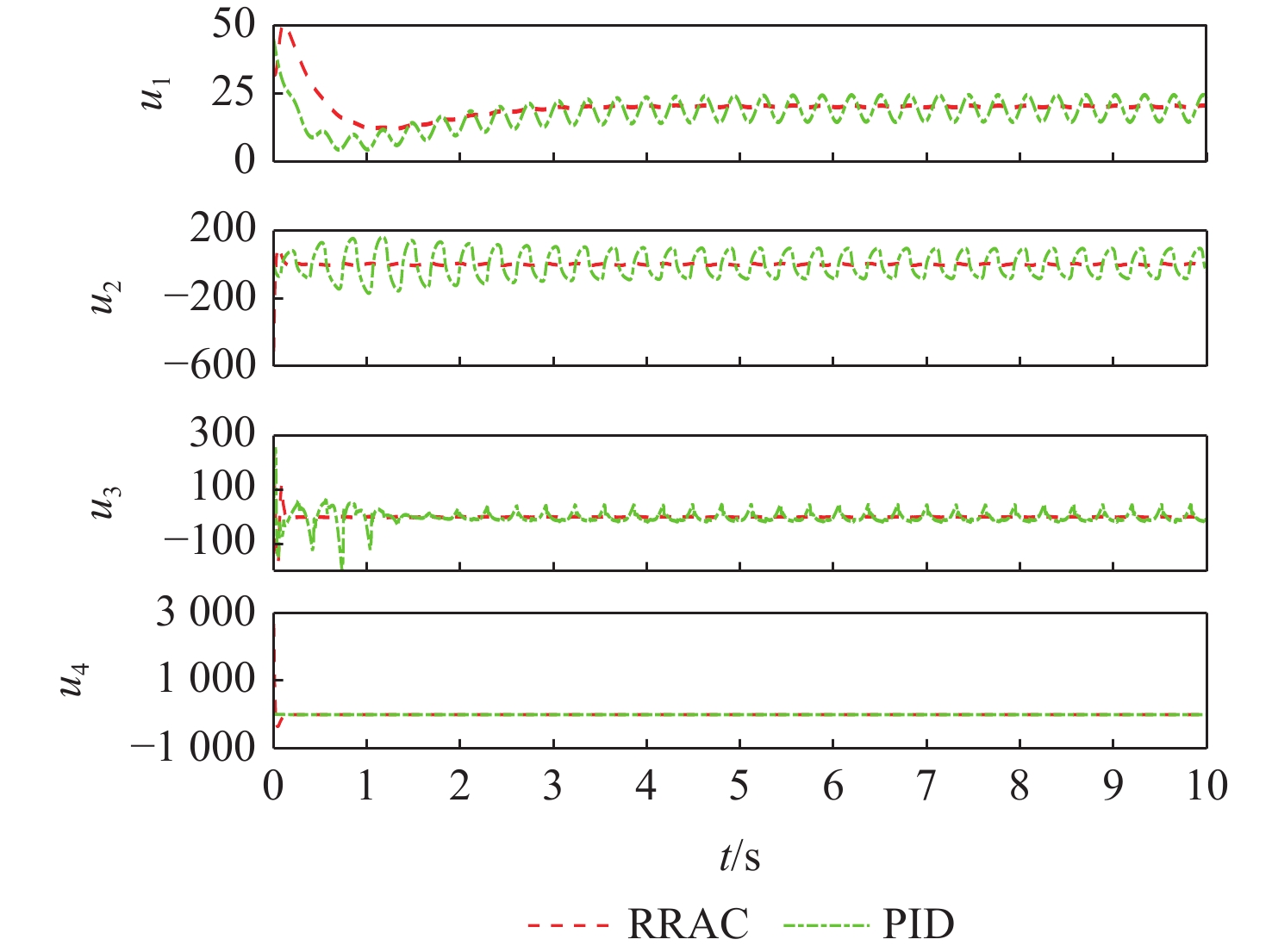
The paper presents a robust adaptive global control method based on radial basis function (RBF) neural network for quadrotors with model uncertainties and bounded external disturbances. The method combines the strong fitting ability of neural network control to unknown nonlinearities and the global stability of robust control, which solves the problem that neural network control is only semi-globally uniformity ultimately bounded, and achieves the double improvement of control accuracy and robustness. A robust controller that operates outside of the approximation domain and a neural network controller that operates within it make up the planned controller. A smooth switching function is introduced to achieve smooth switching between the two to ensure that all signals of the closed-loop system are globally uniform and ultimately bounded. Using the Lyapunov function and Barbalat's lemma, the stability of the nonlinear quadrotor aircraft system is strictly proved. Under model uncertainty and constrained external disturbance, simulations demonstrate that the suggested controller still maintains a good tracking performance for the reference trajectory, and the tracking error approaches zero.

| [1] |
陈梅香, 张瑞瑞, 陈立平, 等. 无人机农林业应用全球研究态势分析[J]. 智慧农业(中英文), 2021, 3(3): 22-37.
CHEN M X, ZHANG R R, CHEN L P, et al. Investigation on advances of unmanned aerial vehicle application research in agriculture and forestry[J]. Smart Agriculture, 2021, 3(3): 22-37(in Chinese).
|
| [2] |
MU B X, ZHANG K W, SHI Y. Integral sliding mode flight controller design for a quadrotor and the application in a heterogeneous multi-agent system[J]. IEEE Transactions on Industrial Electronics, 2017, 64(12): 9389-9398. doi: 10.1109/TIE.2017.2711575
|
| [3] |
闫超, 涂良辉, 王聿豪, 等. 无人机在我国民用领域应用综述[J]. 飞行力学, 2022, 40(3): 1-6,12.
YAN C, TU L H, WANG Y H, et al. Application of unmanned aerial vehicle in civil field in China[J]. Flight Dynamics, 2022, 40(3): 1-6,12(in Chinese).
|
| [4] |
ZUO Z Y, RU P K. Augmented L1 adaptive tracking control of quad-rotor unmanned aircrafts[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 3090-3101. doi: 10.1109/TAES.2014.120705
|
| [5] |
LIU H, LI D J, ZUO Z Y, et al. Robust three-loop trajectory tracking control for quadrotors with multiple uncertainties[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2263-2274.
|
| [6] |
ZHAO B, XIAN B, ZHANG Y, et al. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology[J]. IEEE Transactions on Industrial Electronics, 2015, 62(5): 2891-2902. doi: 10.1109/TIE.2014.2364982
|
| [7] |
姚博誉, 路平, 杨森, 等. 四旋翼飞行器飞行控制技术综述[J]. 航空兵器, 2020, 27(1): 9-16. doi: 10.12132/ISSN.1673-5048.2019.0046
YAO B Y, LU P, YANG S, et al. An overview of flight control technology for quadrotor aircrafts[J]. Aero Weaponry, 2020, 27(1): 9-16(in Chinese). doi: 10.12132/ISSN.1673-5048.2019.0046
|
| [8] |
YU W W, WEN G H, CHEN G R, et al. Distributed cooperative control of multi-agent systems[M]. Singapore: Wiley, 2016.
|
| [9] |
李佳琪, 刘晨, 黄明, 等. 四旋翼无人机位置与姿态控制研究发展综述[J]. 南方农机, 2021, 52(12): 25-27. doi: 10.3969/j.issn.1672-3872.2021.12.008
LI J Q, LIU C, HUANG M, et al. Overview of research and development on position and attitude control of quadrotor UAV[J]. China Southern Agricultural Machinery, 2021, 52(12): 25-27(in Chinese). doi: 10.3969/j.issn.1672-3872.2021.12.008
|
| [10] |
DYDEK Z T, ANNASWAMY A M, LAVRETSKY E. Adaptive control of quadrotor UAVs: a design trade study with flight evaluations[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1400-1406. doi: 10.1109/TCST.2012.2200104
|
| [11] |
MU B X, CHEN J C, SHI Y, et al. Design and implementation of nonuniform sampling cooperative control on a group of two-wheeled mobile robots[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5035-5044. doi: 10.1109/TIE.2016.2638398
|
| [12] |
WEN G H, ZHAO Y, DUAN Z S, et al. Containment of higher-order multi-leader multi-agent systems: a dynamic output approach[J]. IEEE Transactions on Automatic Control, 2016, 61(4): 1135-1140. doi: 10.1109/TAC.2015.2465071
|
| [13] |
MU B X, LI H X, DING J, et al. Consensus in second-order multiple flying vehicles with random delays governed by a Markov chain[J]. Journal of the Franklin Institute, 2015, 352(9): 3628-3644. doi: 10.1016/j.jfranklin.2015.01.034
|
| [14] |
ZHAO E J, CHAO T, WANG S Y, et al. Finite-time formation control for multiple flight vehicles with accurate linearization model[J]. Aerospace Science and Technology, 2017, 71: 90-98. doi: 10.1016/j.ast.2017.08.018
|
| [15] |
HUA C C, CHEN J N, LI Y F. Leader-follower finite-time formation control of multiple quadrotors with prescribed performance[J]. International Journal of Systems Science, 2017, 48(12): 2499-2508. doi: 10.1080/00207721.2017.1323135
|
| [16] |
ZHU Z C, PAN Y N, ZHOU Q, et al. Event-triggered adaptive fuzzy control for stochastic nonlinear systems with unmeasured states and unknown backlash-like hysteresis[J]. IEEE Transactions on Fuzzy Systems, 2021, 29(5): 1273-1283. doi: 10.1109/TFUZZ.2020.2973950
|
| [17] |
LIN X L, WU C F, CHEN B S. Robust H∞ adaptive fuzzy tracking control for MIMO nonlinear stochastic Poisson jump diffusion systems[J]. IEEE Transactions on Cybernetics, 2019, 49(8): 3116-3130. doi: 10.1109/TCYB.2018.2839364
|
| [18] |
RODRÍGUEZ-MATA A E, GONZÁLEZ-HERNÁNDEZ I, RANGEL-PERAZA J G, et al. Wind-gust compensation algorithm based on high-gain residual observer to control a quadrotor aircraft: real-time verification task at fixed point[J]. International Journal of Control, Automation and Systems, 2018, 16(2): 856-866. doi: 10.1007/s12555-016-0771-6
|
| [19] |
LABBADI M, BOUKAL Y, CHERKAOUI M, et al. Fractional-order global sliding mode controller for an uncertain quadrotor UAVs subjected to external disturbances[J]. Journal of the Franklin Institute, 2021, 358(9): 4822-4847. doi: 10.1016/j.jfranklin.2021.04.032
|
| [20] |
WANG L, JIA H M. The trajectory tracking problem of quadrotor UAV: global stability analysis and control design based on the cascade theory[J]. Asian Journal of Control, 2014, 16(2): 574-588. doi: 10.1002/asjc.746
|
| [21] |
SHENG S Z, SUN C W. An adaptive attitude tracking control approach for an unmanned helicopter with parametric uncertainties and measurement noises[J]. International Journal of Control, Automation and Systems, 2016, 14(1): 217-228. doi: 10.1007/s12555-014-0244-8
|
| [22] |
LIU J, GAI W D, ZHANG J, et al. Nonlinear adaptive backstepping with ESO for the quadrotor trajectory tracking control in the multiple disturbances[J]. International Journal of Control, Automation and Systems, 2019, 17(11): 2754-2768. doi: 10.1007/s12555-018-0909-9
|
| [23] |
DAS A, LEWIS F, SUBBARAO K. Dynamic neural network-based robust backstepping control approach for quadrotors[C]// Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit. Reston: AIAA, 2008: 1-17.
|
| [24] |
DIERKS T, JAGANNATHAN S. Output feedback control of a quadrotor UAV using neural networks[J]. IEEE Transactions on Neural Networks, 2010, 21(1): 50-66. doi: 10.1109/TNN.2009.2034145
|
| [25] |
XU R, ÖZGÜNER Ü. Sliding mode control of a class of underactuated systems[J]. Automatica, 2008, 44(1): 233-241. doi: 10.1016/j.automatica.2007.05.014
|

Figures(16)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.




 DownLoad:
DownLoad: