| Citation: | JIA X X,ZHAO D Q,XIAO G R,et al. A GNSS/IMU/vision multi-source fusion localization method based on refined pre-integration[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):2026-2032 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0567

|
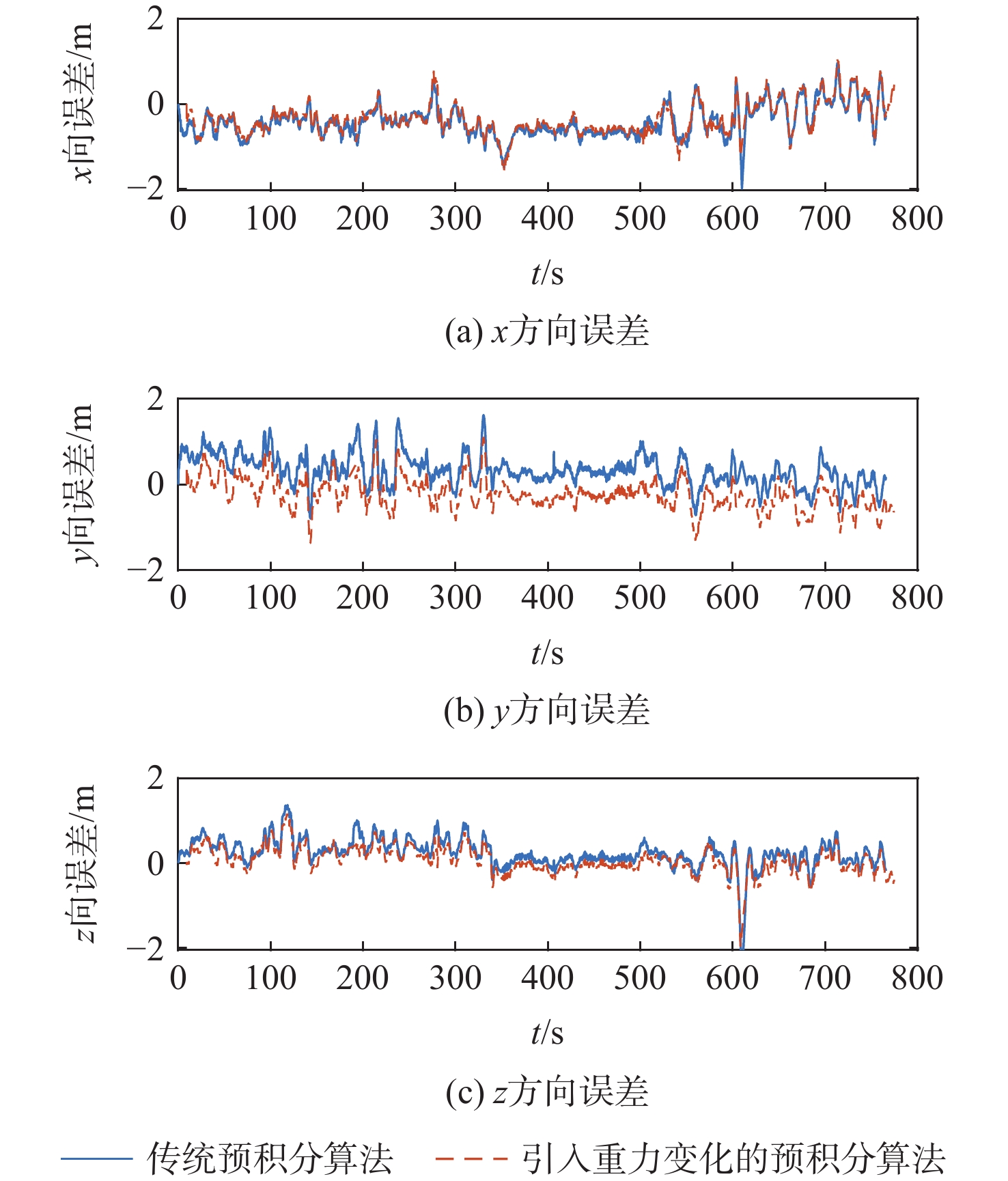
A pre-integration algorithm taking into account the earth's rotation and gravity change is developed in order to address the issue that the conventional pre-integration algorithm fixes the value of the earth's gravity and ignores the Earth's rotation. Referring to the dynamic model of high-precision strapdown inertial navigation, the earth rotation angle rate is introduced in the attitude update of the pre-integral dynamic model, and the Coriolis acceleration caused by the earth rotation is introduced in the velocity and position update. Simultaneously, the traditional pre-integral model is improved, taking into account that the carrier's position can feed back the gravity change to the pre-integral algorithm in time. All the process of the pre-integral algorithm are derived in detail after the Earth's rotation and the gravity change are introduced. The refined pre-integration algorithm is applied to a multi-source fusion system based on tightly coupled GNSS/INS/vision. The experimental results show that the model error of the system pre-integration can be effectively reduced by using the refined pre-integration model, and the positioning and attitude accuracy of the multi-source fusion system is improved by 32.41% and 4.23%, respectively.

| [1] |
李团. 单频多模GNSS/INS/视觉紧组合高精度位姿估计方法研究[D]. 武汉: 武汉大学, 2019: 1-5.
LI T. Research on the tightly coupled single-frequency multi-GNSS/INS/vision integration for precise position and orientation estimation[D]. Wuhan: Wuhan University, 2019: 1-5 (in Chinese).
|
| [2] |
GAO Z Z, GE M R, SHEN W B, et al. Evaluation on the impact of IMU grades on BDS + GPS PPP/INS tightly coupled integration[J]. Advances in Space Research, 2017, 60(6): 1283-1299. doi: 10.1016/j.asr.2017.06.022
|
| [3] |
朱锋. GNSS/SINS/视觉多传感器融合的精密定位定姿方法与关键技术[D]. 武汉: 武汉大学, 2020: 3-5.
ZHU F. GNSS/SINS/Vision multi-sensors integration for precise positioning and orientation determination[D]. Wuhan: Wuhan University, 2020: 3-5 (in Chinese).
|
| [4] |
HUANG G Q. Visual-inertial navigation: a concise review[C]// 2019 International Conference on Robotics and Automation (ICRA). New York: ACM, 2019: 9572-9582.
|
| [5] |
MASCARO R, TEIXEIRA L, HINZMANN T, et al. GOMSF: graph-optimization based multi-sensor fusion for robust UAV pose estimation[C]// 2018 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2018: 1421-1428.
|
| [6] |
QIN T, CAO S Z, PAN J, et al. A general optimization-based framework for global pose estimation with multiple sensors[EB/OL]. (2019-01-11) [2022-09-30].
|
| [7] |
CIOFFI G, SCARAMUZZA D. Tightly-coupled fusion of global positional measurements in optimization-based visual-inertial odometry[C]// 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2020: 5089-5095.
|
| [8] |
GONG Z, LIU P L, WEN F, et al. Graph-based adaptive fusion of GNSS and VIO under intermittent GNSS-degraded environment[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 70: 8501116.
|
| [9] |
LIU J X, GAO W, HU Z Y. Optimization-based visual-inertial SLAM tightly coupled with raw GNSS measurements[C]// 2021 IEEE International Conference on Robotics and Automation (ICRA). New York: ACM, 2021: 11612–11618.
|
| [10] |
CAO S Z, LU X Y, SHEN S J. GVINS: tightly coupled GNSS-visual-inertial fusion for smooth and consistent state estimation[J]. IEEE Transactions on Robotics, 2022, 38(4): 2004-2021. doi: 10.1109/TRO.2021.3133730
|
| [11] |
QIN T, LI P L, SHEN S J. VINS-mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. doi: 10.1109/TRO.2018.2853729
|
| [12] |
白师宇, 赖际舟, 吕品, 等. 基于IMU/ODO预积分的多传感器即插即用因子图融合方法[J]. 中国惯性技术学报, 2020, 28(5): 624-628.
BAI S Y, LAI J Z, LV P, et al. Multisensory plug-and-play factor graph fusion method based on IMU/odometer preintegration[J]. Journal of Chinese Inertial Technology, 2020, 28(5): 624-628 (in Chinese).
|
| [13] |
徐晓苏, 吴贤. 基于IMU预积分封闭解的单目视觉惯性里程计算法[J]. 中国惯性技术学报, 2020, 28(4): 440-447.
XU X S, WU X. Monocular visual-inertial odometry method based on IMU pre-integrated closed solution[J]. Journal of Chinese Inertial Technology, 2020, 28(4): 440-447 (in Chinese).
|
| [14] |
LUPTON T, SUKKARIEH S. Visual-inertial-aided navigation for high-dynamic motion in built environments without initial conditions[J]. IEEE Transactions on Robotics, 2012, 28(1): 61-76. doi: 10.1109/TRO.2011.2170332
|
| [15] |
FORSTER C, CARLONE L, DELLAERT F, et al. On-manifold preintegration for real-time visual: inertial odometry[J]. IEEE Transactions on Robotics, 2017, 33(1): 1-21. doi: 10.1109/TRO.2016.2597321
|
| [16] |
BARRAU A, BONNABEL S. A mathematical framework for IMU error propagation with applications to preintegration[C]// 2020 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2020: 5732-5738.
|
| [17] |
TANG H L, NIU X J, ZHANG T S, et al. Exploring the accuracy potential of IMU preintegration in factor graph optimization[EB/OL]. (2021-09-07)[2022-09-30].
|
| [18] |
JIANG J X, NIU X J, LIU J N. Improved IMU preintegration with gravity change and earth rotation for optimization-based GNSS/VINS[J]. Remote Sensing, 2020, 12(18): 3048. doi: 10.3390/rs12183048
|
| [19] |
BUDIYONO A. Principles of GNSS, inertial, and multi-sensor integrated navigation systems[J]. Industrial Robot, 2013, 67(3):191-192.
|

Figures(5) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: