| Citation: | GUO J J,QI J T,WANG M M,et al. A cooperative search and encirclement algorithm for quadrotors in unknown areas[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(8):2001-2010 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0606

|
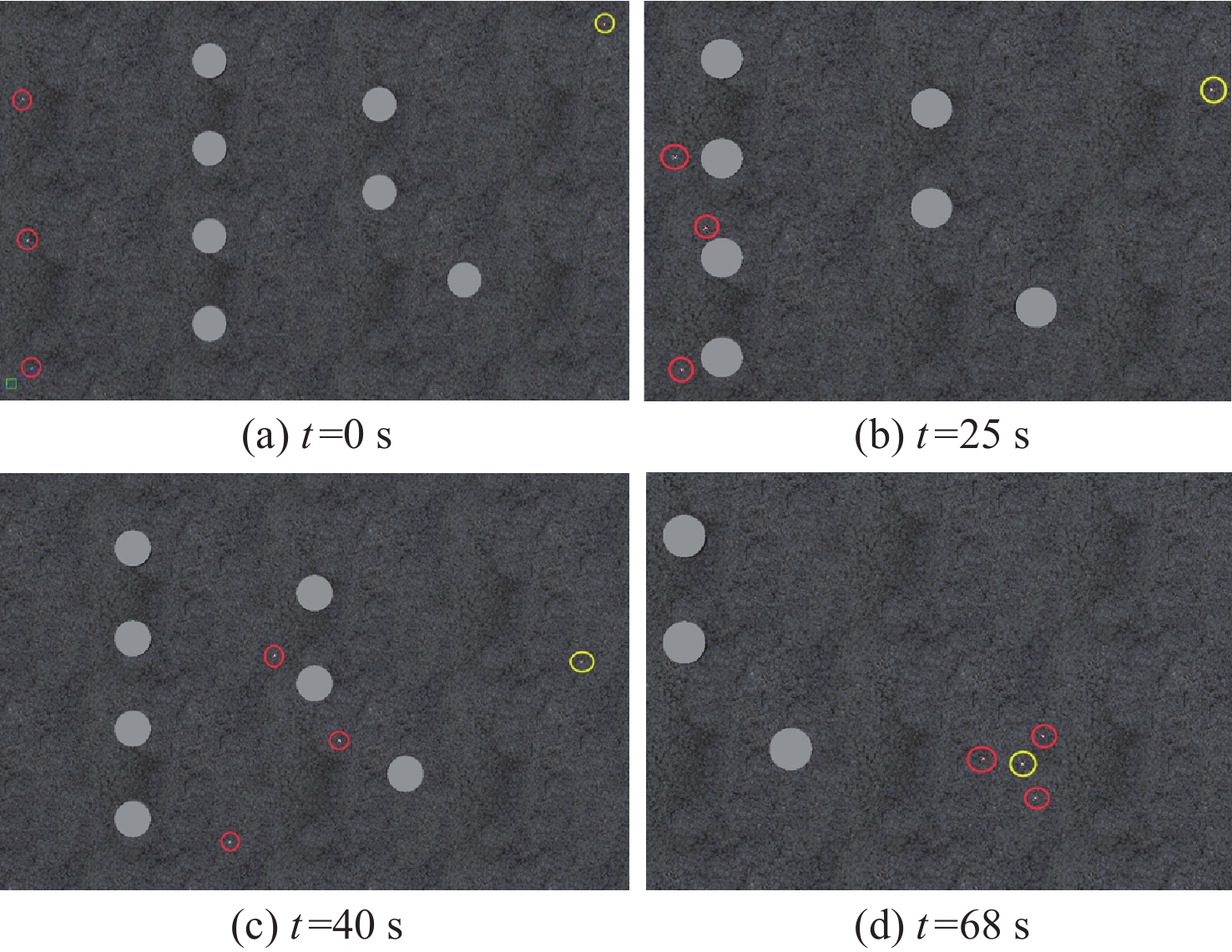
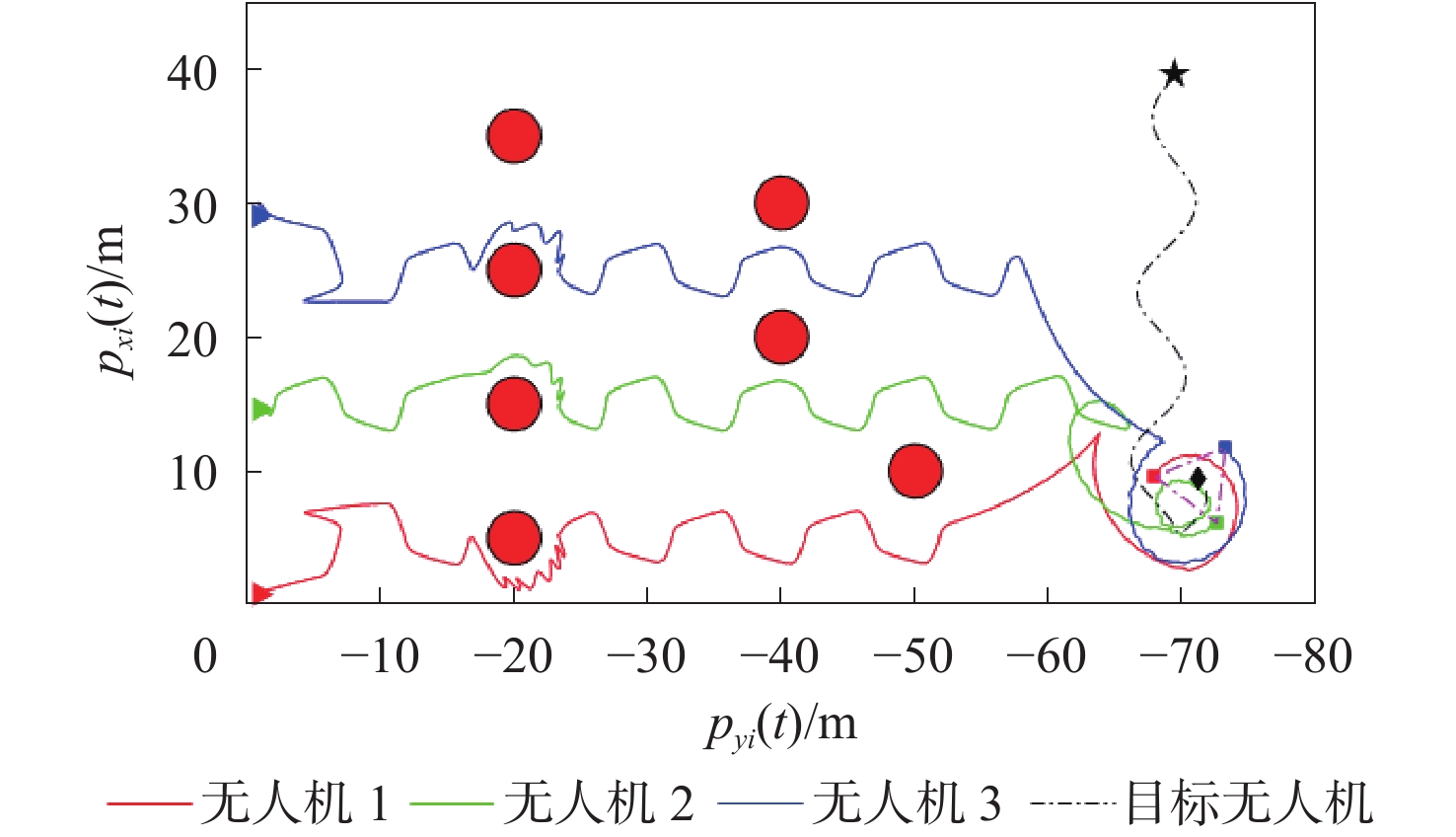
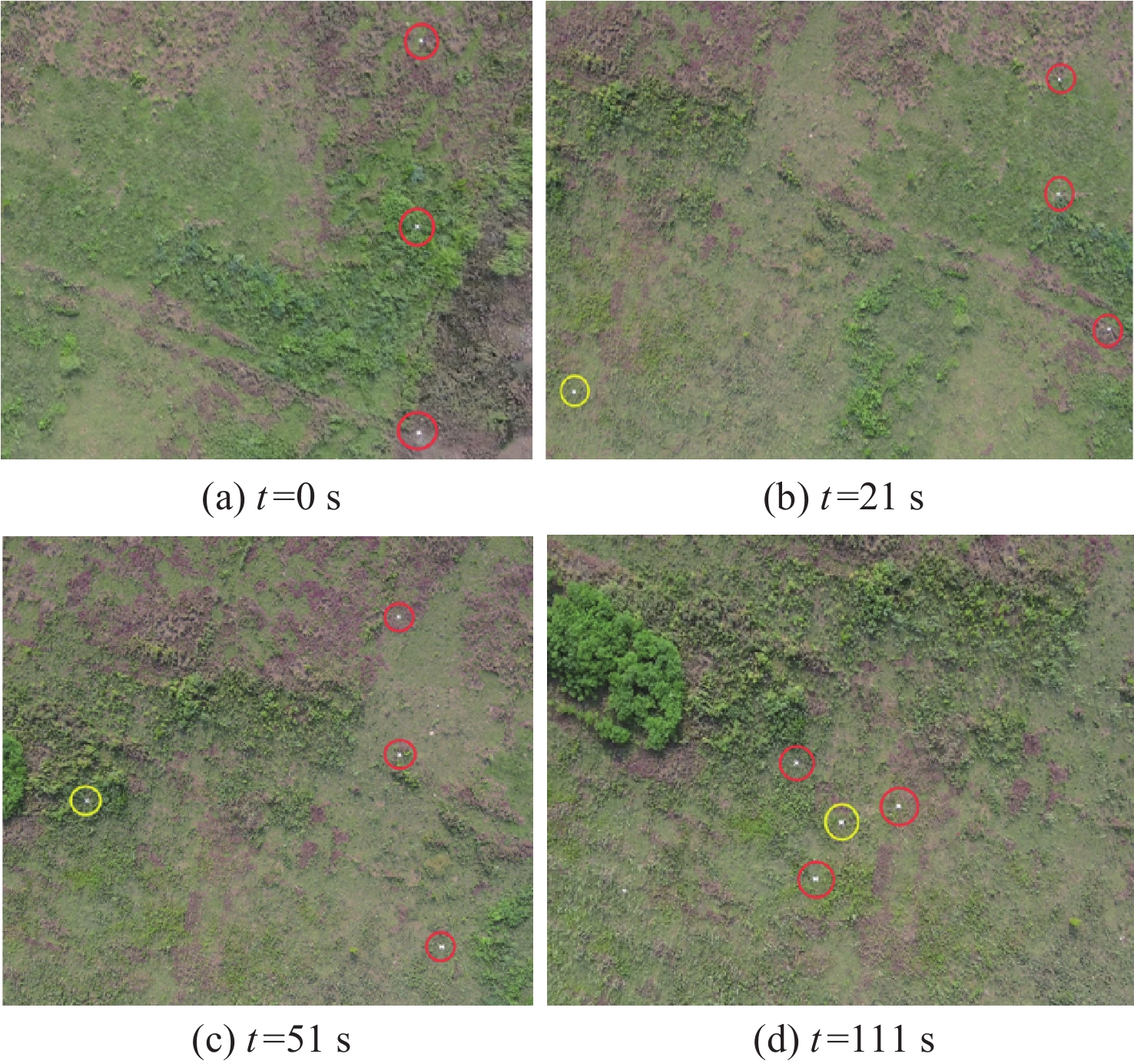
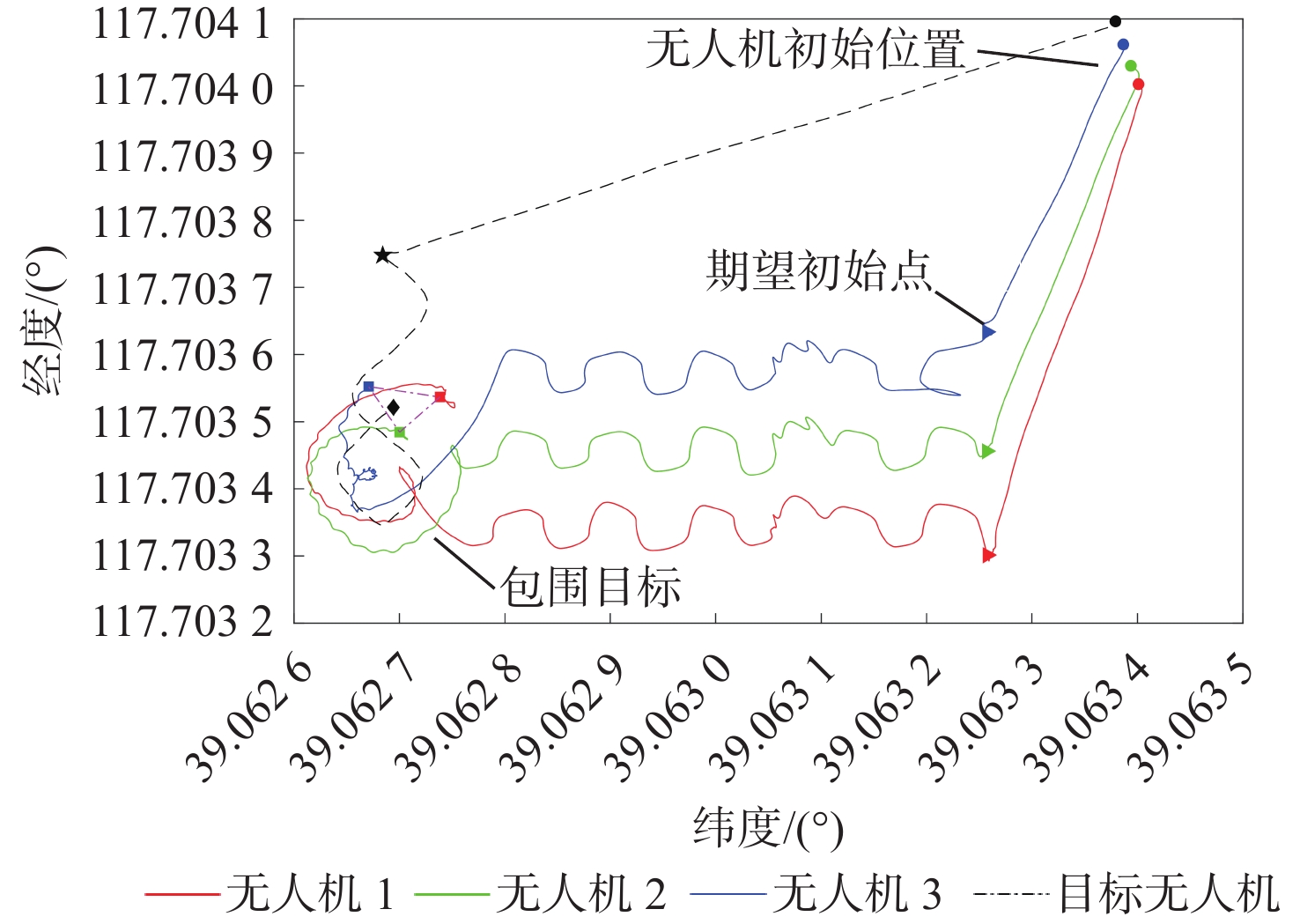
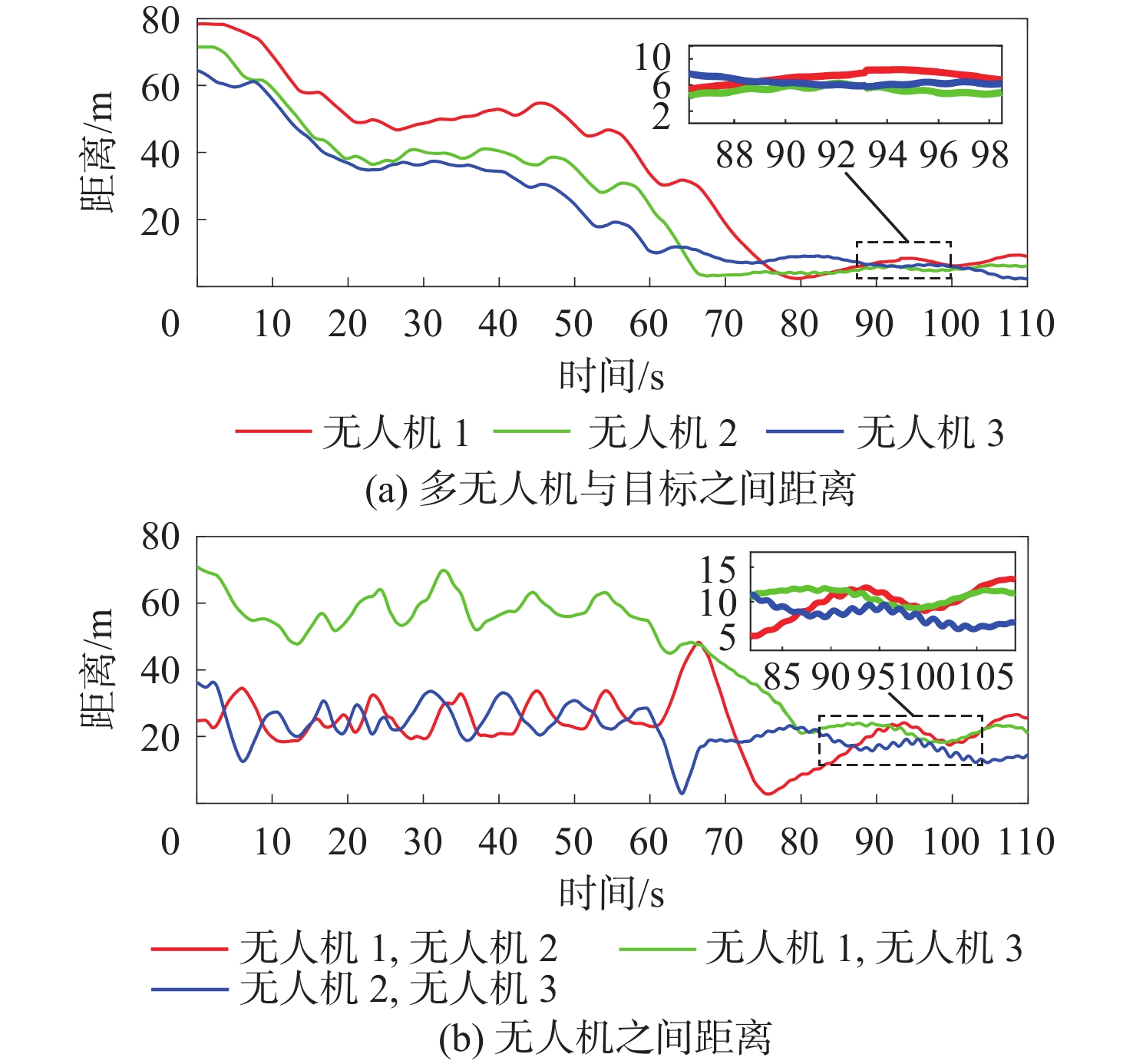
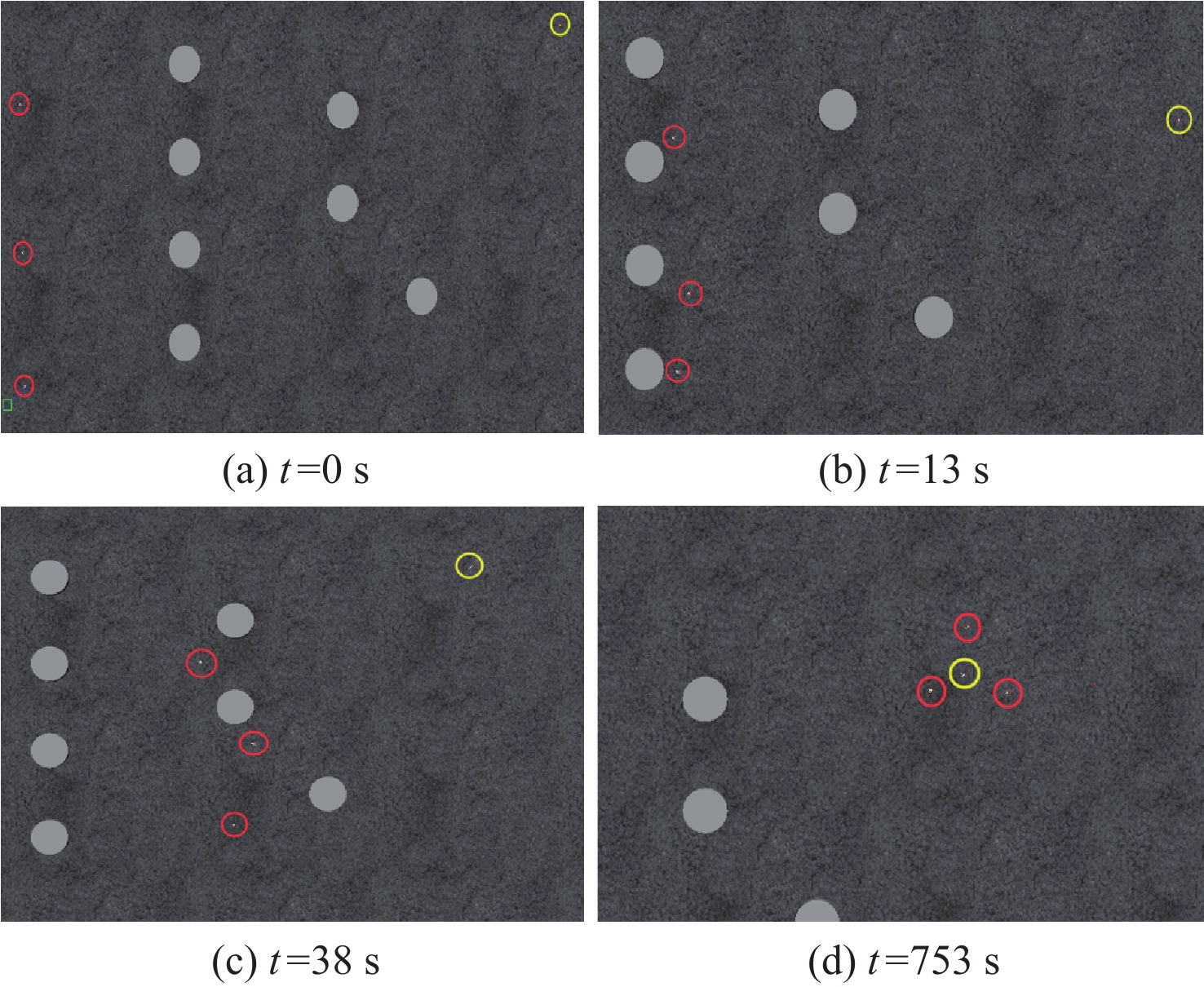
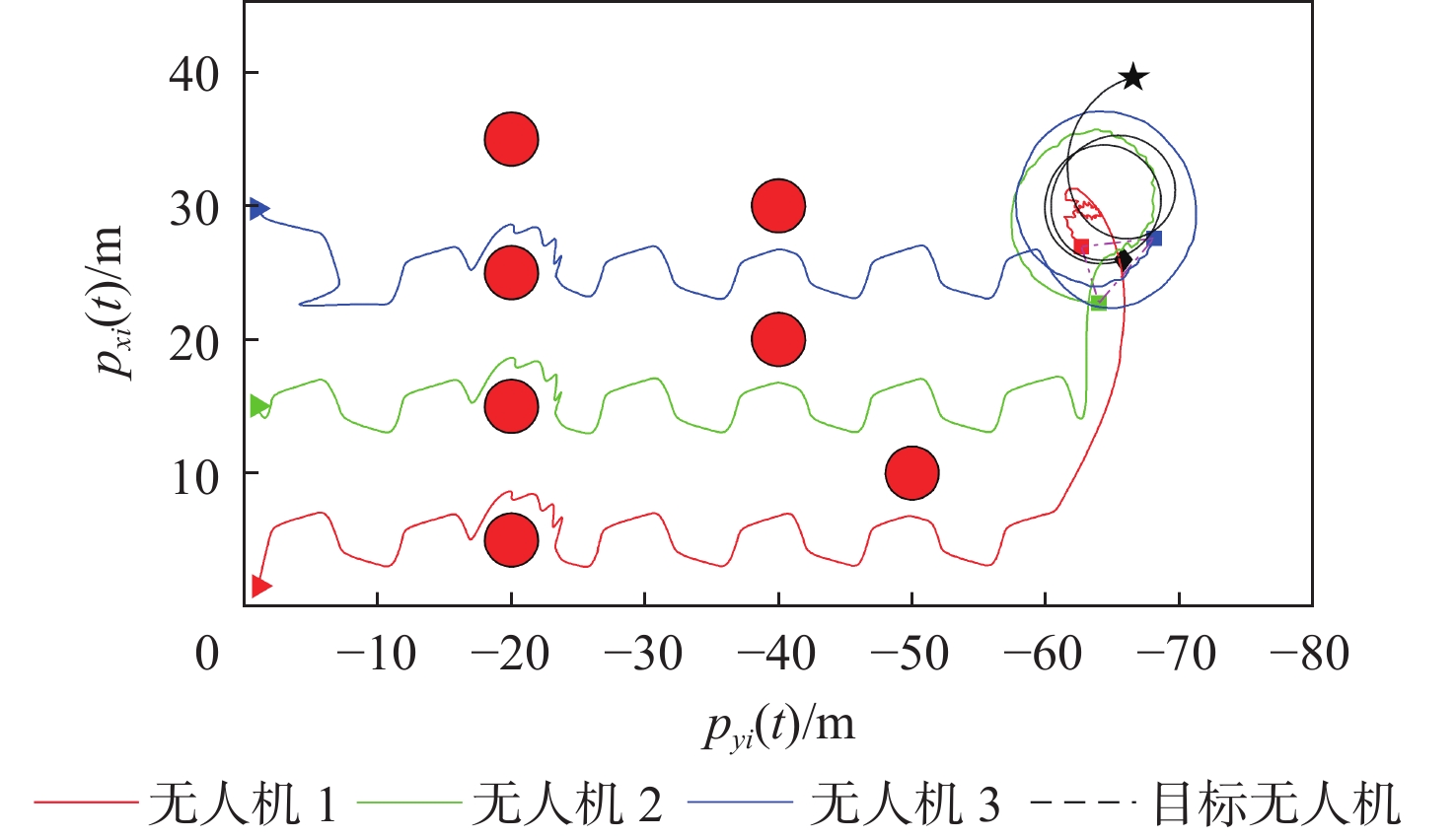
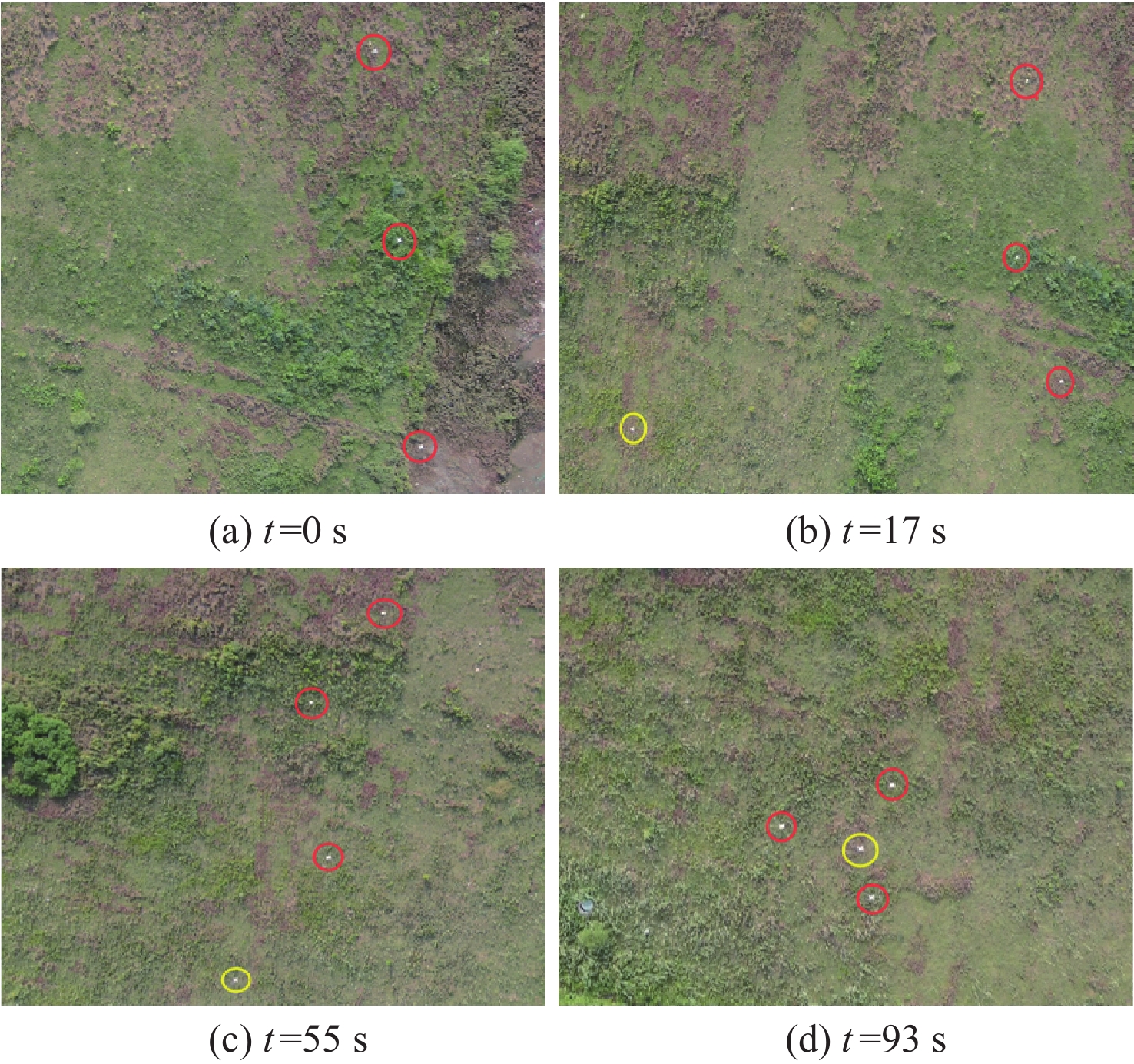
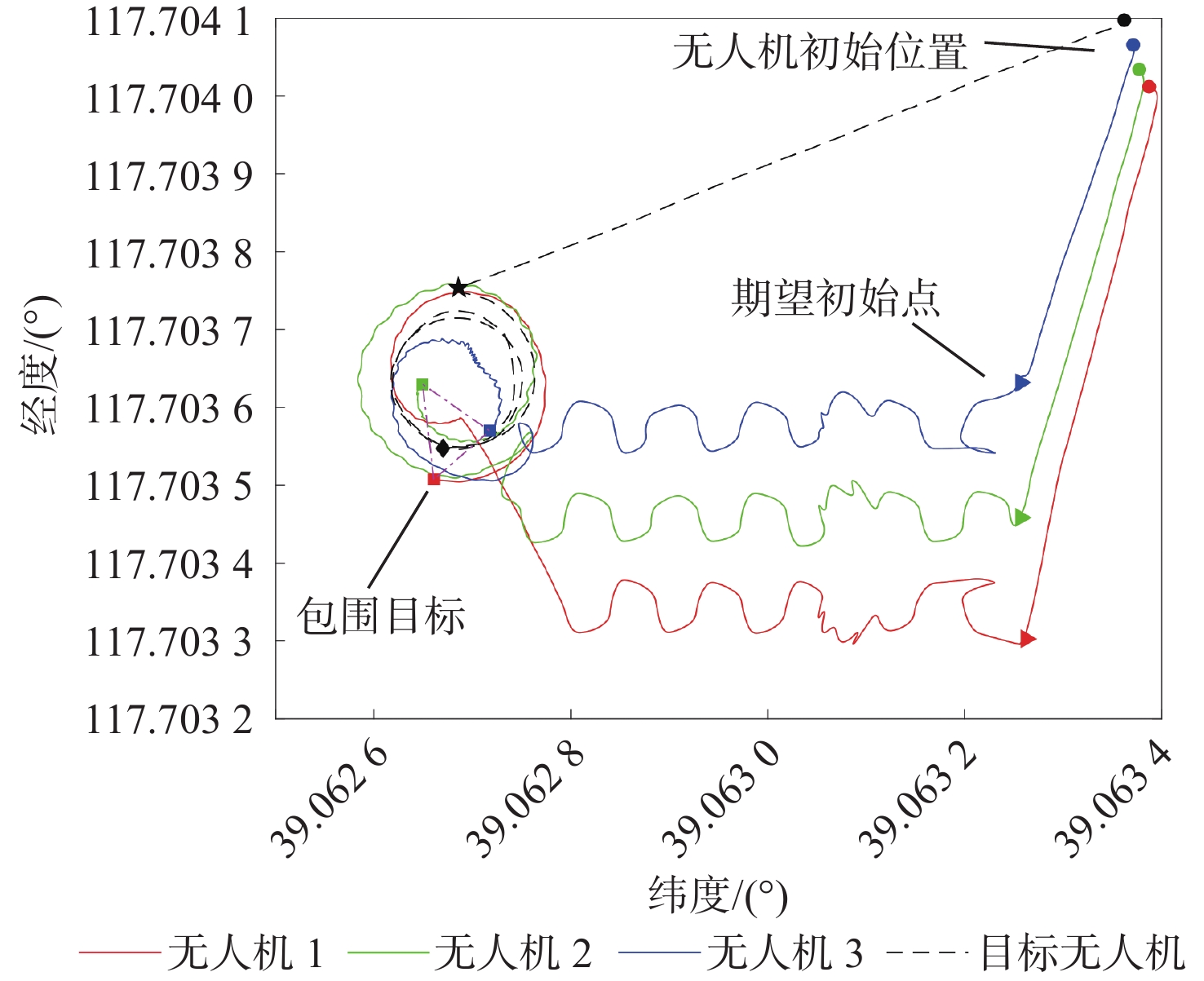
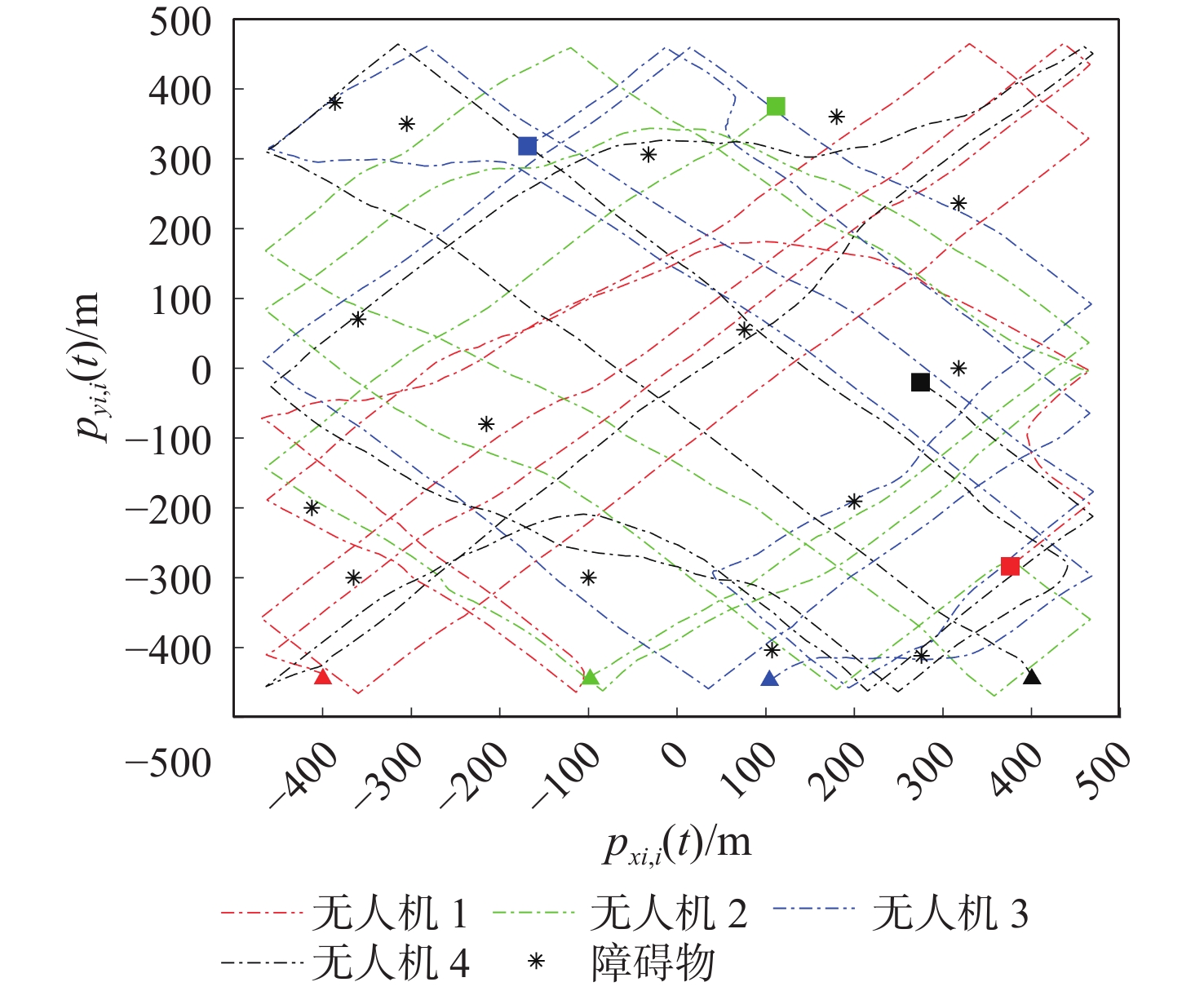
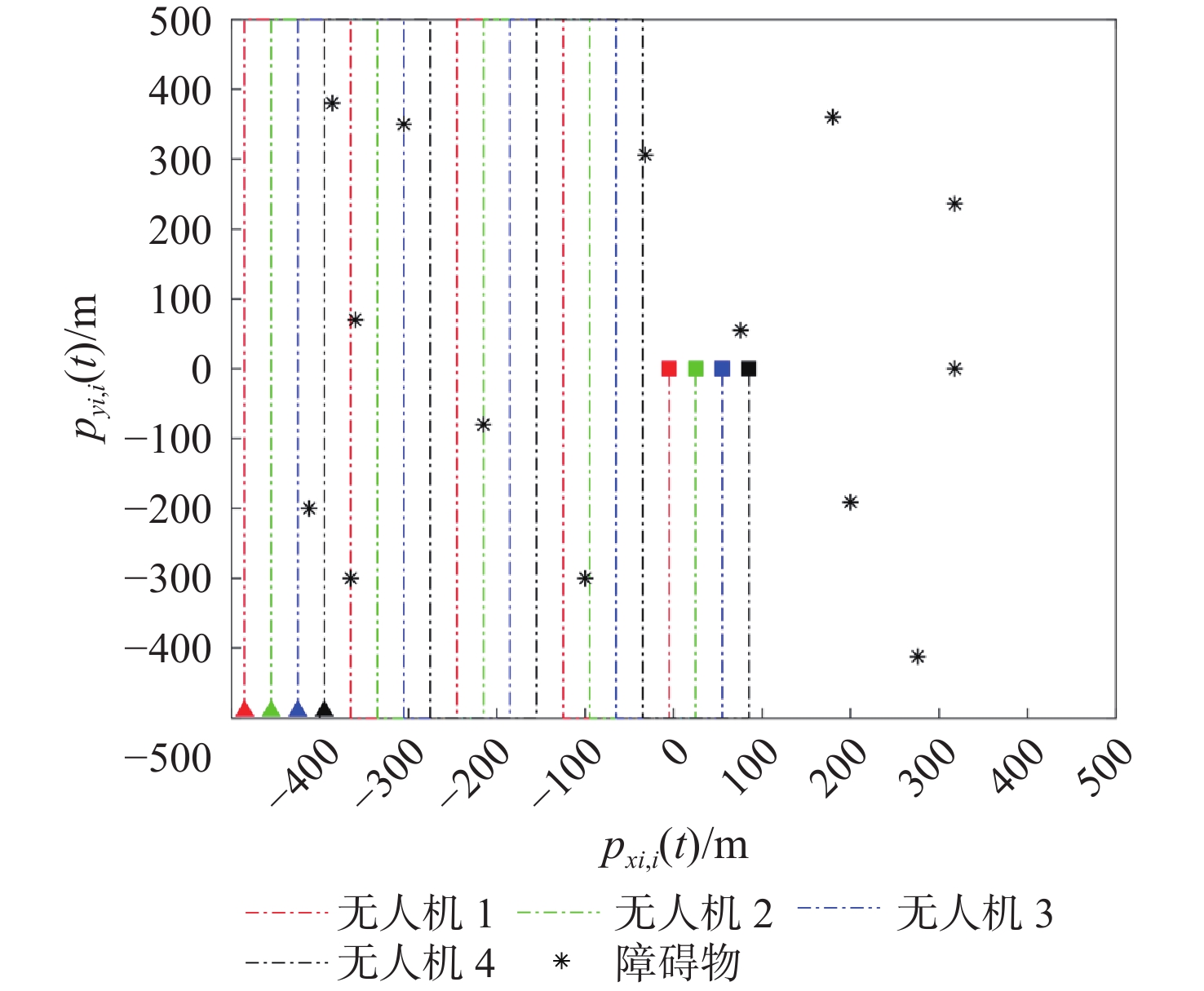
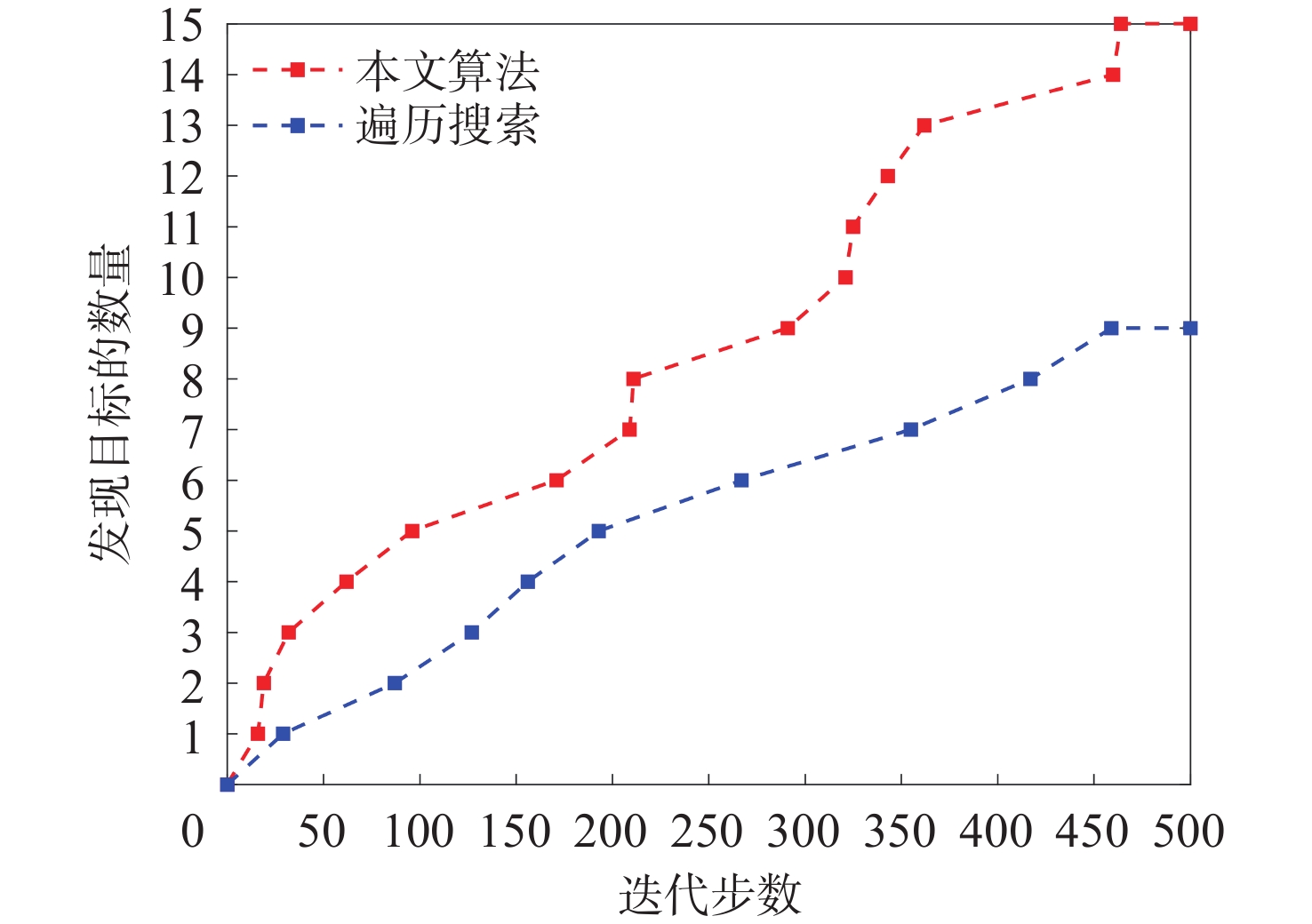
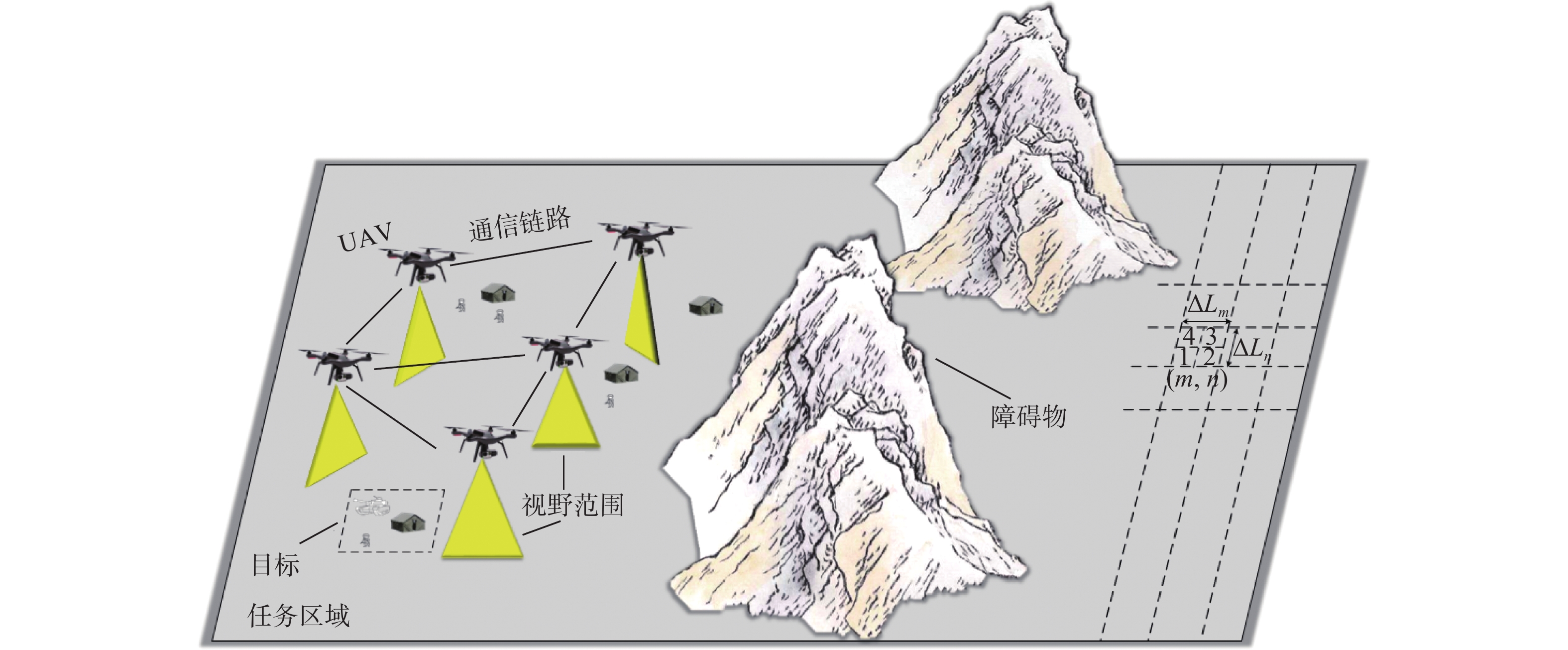
Quadrotor swarms can be used for regional reconnaissance to establish the cognition of the environment and targets. This study offers a distributed cooperative search algorithm and a dynamic target surrounding technique for quadrotor swarm to solve the challenge of locating and monitoring targets in unexplored areas. To reduce the complexity of the search algorithm, the area is divided into two-level grid subareas by the grid division method. Considering the randomness of dynamic targets, a digital pheromone is designed to guide quadrotors to perform a second search in the mission area. Taking the fast search target as the reward function, the optimal solution is obtained through rolling optimization as the input of quadrotors. The consensus protocol is then used as the foundation for a cooperative tracking and surrounding procedure to gather real-time data on dynamic targets. Several simulation results and outdoor flight experiments verify that the proposed algorithm can effectively search and dynamically monitor dynamic targets in unknown areas.

| [1] |
HAN J L, CHEN Y Q. Multiple UAV formations for cooperative source seeking and contour mapping of a radiative signal field[J]. Journal of Intelligent and Robotic Systems, 2014, 74(1-2): 323-332. doi: 10.1007/s10846-013-9897-4
|
| [2] |
PETRLÍK M, BÁČA T, HEŘT D, et al. A robust UAV system for operations in a constrained environment[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2169-2176. doi: 10.1109/LRA.2020.2970980
|
| [3] |
吴傲, 杨任农, 梁晓龙, 等. 基于信息素决策的无人机集群协同搜索算法[J]. 北京亚洲成人在线一二三四五六区学报, 2021, 47(4): 814-827. doi: 10.13700/j.bh.1001-5965.2020.0026
WU A, YANG R N, LIANG X L, et al. Cooperative search algorithm based on pheromone decision for UAV swarm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(4): 814-827(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0026
|
| [4] |
SHIN G, YOOUN H, SHIN D, et al. Incremental learning method for cyber intelligence, surveillance, and reconnaissance in closed military network using converged IT techniques[J]. Soft Computing, 2018, 22(20): 6835-6844. doi: 10.1007/s00500-018-3433-1
|
| [5] |
ZOHDI T I. Multiple UAVs for mapping: A review of basic modeling, simulation, and applications[J]. Annual Review of Environment and Resources, 2018, 43: 523-543. doi: 10.1146/annurev-environ-102017-025912
|
| [6] |
曹翔, 孙长银. 栅格地图中多机器人协作搜索目标[J]. 控制理论与应用, 2018, 35(3): 273-282. doi: 10.7641/CTA.2017.70242
CAO X, SUN C Y. Cooperative target search of multi-robot in grid map[J]. Control Theory & Applications, 2018, 35(3): 273-282(in Chinese). doi: 10.7641/CTA.2017.70242
|
| [7] |
ALFEO A, CIMINO M, VAGLINI G. Enhancing biologically inspired swarm behavior: Metaheuristics to foster the optimization of UAVs coordination in target search[J]. Computers & Operations Research, 2019, 110: 34-47.
|
| [8] |
GUASTELLA D C, CANTELLI L, GIAMMELLO G, et al. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments[J]. Computers & Electrical Engineering, 2019, 75: 189-201.
|
| [9] |
TORRES M, PELTA D A, VERDEGAY J L, et al. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction[J]. Expert Systems with Applications, 2016, 55: 441-451. doi: 10.1016/j.eswa.2016.02.007
|
| [10] |
KHAN A, YANMAZ E, RINNER B. Information exchange and decision making in micro aerial vehicle networks for cooperative search[J]. IEEE Transactions on Control of Network Systems, 2015, 2(4): 335-347. doi: 10.1109/TCNS.2015.2426771
|
| [11] |
AGGARWAL S, KUMAR N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges[J]. Computer Communications, 2020, 149: 270-299. doi: 10.1016/j.comcom.2019.10.014
|
| [12] |
SUN X X, CAI C, PAN S, et al. A cooperative target search method based on intelligent water drops algorithm[J]. Computers & Electrical Engineering, 2019, 80: 106494.
|
| [13] |
ZHEN Z Y, XING D J, GAO C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm[J]. Aerospace Science and Technology, 2018, 76: 402-411. doi: 10.1016/j.ast.2018.01.035
|
| [14] |
ZHEN Z Y, ZHU P, XUE Y X, et al. Distributed intelligent self-organized mission planning of multi-UAV for dynamic targets cooperative search-attack[J]. Chinese Journal of Aeronautics, 2019, 32(12): 2706-2716. doi: 10.1016/j.cja.2019.05.012
|
| [15] |
LI L, ZHANG X, YUE W, et al. Cooperative search for dynamic targets by multiple UAVs with communication data losses[J]. ISA Transactions, 2021, 114: 230-241. doi: 10.1016/j.isatra.2020.12.055
|
| [16] |
OH H, RAMEZAN SHIRAZI A, SUN C L, et al. Bio-inspired self-organising multi-robot pattern formation: A review[J]. Robotics and Autonomous Systems, 2017, 91: 83-100. doi: 10.1016/j.robot.2016.12.006
|
| [17] |
PETRÁČEK P, WALTER V, BÁČA T, et al. Bio-inspired compact swarms of unmanned aerial vehicles without communication and external localization[J]. Bioinspiration & Biomimetics, 2021, 16(2): 026009.
|
| [18] |
LUO D L, SHAO J A, XU Y, et al. Coevolution pigeon-inspired optimization with cooperation-competition mechanism for multi-UAV cooperative region search[J]. Applied Sciences, 2019, 9(5): 827. doi: 10.3390/app9050827
|
| [19] |
KURDI H, AL MEGREN S, YOUCEF TOUMI K, et al. Bee-inspired task allocation algorithm for multi-UAV search and rescue missions[J]. International Journal of Bio-Inspired Computation, 2020, 16(4): 252-263. doi: 10.1504/IJBIC.2020.112339
|
| [20] |
VAN PARUNAK H, PURCELL M, O'CONNELL R. Digital pheromones for autonomous coordination of swarming UAV's[C]//Proceedings of the 1st UAV Conference. Reston: AIAA, 2002: 1-9.
|
| [21] |
DONG X W, ZHOU Y, REN Z, et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5014-5024. doi: 10.1109/TIE.2016.2593656
|
| [22] |
XIA Y Q, NA X T, SUN Z Q, et al. Formation control and collision avoidance for multi-agent systems based on position estimation[J]. ISA Transactions, 2016, 61: 287-296. doi: 10.1016/j.isatra.2015.12.010
|
| [23] |
TIAN B L, LIU L H, LU H C, et al. Multivariable finite time attitude control for quadrotor UAV: Theory and experimentation[J]. IEEE Transactions on Industrial Electronics, 2018, 65(3): 2567-2577. doi: 10.1109/TIE.2017.2739700
|
| [24] |
DU H B, ZHU W W, WEN G H, et al. Distributed formation control of multiple quadrotor aircraft based on nonsmooth consensus algorithms[J]. IEEE Transactions on Cybernetics, 2019, 49(1): 342-353. doi: 10.1109/TCYB.2017.2777463
|
Figures(16)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.




 DownLoad:
DownLoad: