| Citation: | ZHENG S F,ZHU Y C,LING J,et al. Experimental study on parallel control of axial dual-piezoelectric stack actuator[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(6):1460-1470 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0432

|
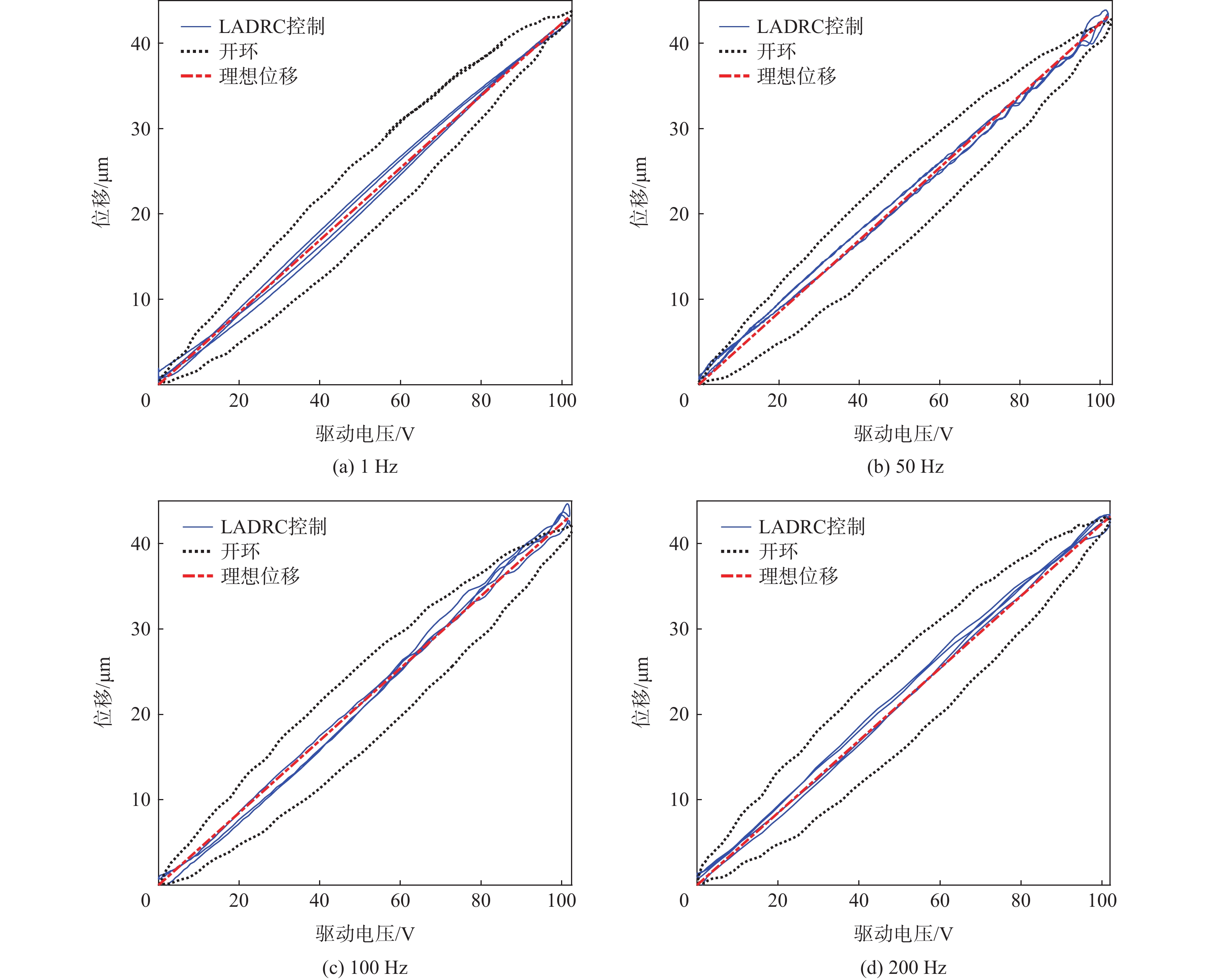
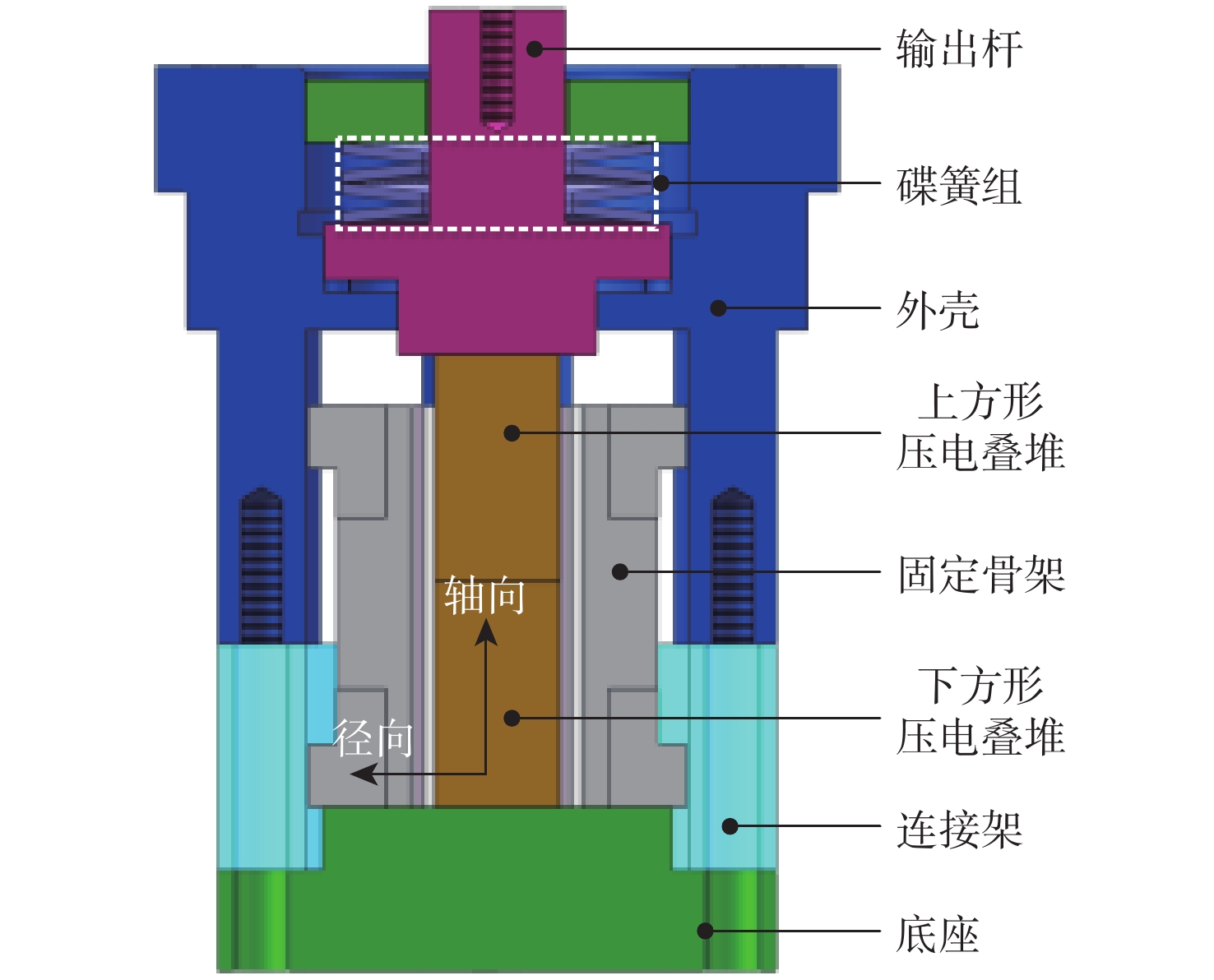
Compared with common piezoelectric stack actuators, the dual-piezoelectric stack actuator exhibits displacement amplification functionality, but suffers from poor positioning accuracy due to the inherent hysteresis nonlinearity of piezoelectric materials. To reduce the hysteresis nonlinearity of dual-piezoelectric stack actuators, an improved Prandtl-Ishlinskii(PI) dynamic hysteresis model is established and the related parameters are identified. Then, an output displacement allocation strategy and parallel control scheme of the dual-piezoelectric stack actuator are proposed. Based on the inverse hysteresis model, the feedforward-feedback compound control is examined by experiments, and compared with the linear active disturbance rejection control (LADRC) scheme which is independent on the inverse hysteresis model. The control algorithm is validated on the Links-RT real-time control system. Experimental results indicate that the feedforward-feedback compound control performs the best within the frequency range of 1~200 Hz. When the tracking signal frequency reaches 200 Hz, the root mean square error and maximum absolute error are 0.454 4 μm and 1.95 μm respectively, much lower than those of open loop control (4.369 6 μm and 6.08 μm).

| [1] |
李宇阳, 朱玉川, 李仁强, 等. 双压电叠堆驱动执行器率相关迟滞建模与分析[J]. 压电与声光, 2019, 41(2): 258-264.
LI Y Y, ZHU Y C, LI R Q, et al. Modeling and analysis of rate-dependent hysteresis for dual-piezoelectric stack driven actuator[J]. Piezoelectrics & Acoustooptics, 2019, 41(2): 258-264(in Chinese).
|
| [2] |
LIU Y F, LI J, HU X H, et al. Modeling and control of piezoelectric inertia-friction actuators: Review and future research directions[J]. Mechanical Sciences, 2015, 6(2): 95-107. doi: 10.5194/ms-6-95-2015
|
| [3] |
周淼磊, 杨志刚, 田彦涛, 等. 压电执行器非线性控制方法研究进展[J]. 压电与声光, 2007, 29(6): 656-659. doi: 10.3969/j.issn.1004-2474.2007.06.010
ZHOU M L, YANG Z G, TIAN Y T, et al. The development on the nonlinear control method of piezoelectric actuator[J]. Piezoelectrics & Acoustooptics, 2007, 29(6): 656-659(in Chinese). doi: 10.3969/j.issn.1004-2474.2007.06.010
|
| [4] |
GE P, JOUANEH M. Tracking control of a piezoceramic actuator[J]. IEEE Transactions on Control Systems Technology, 1996, 4(3): 209-216. doi: 10.1109/87.491195
|
| [5] |
LING J, RAKOTONDRABE M, FENG Z, et al. A robust resonant controller for high-speed scanning of nanopositioners: Design and implementation[J]. IEEE Transactions on Control Systems Technology, 2020, 28(3): 1116-1123. doi: 10.1109/TCST.2019.2899566
|
| [6] |
GU G Y, ZHU L M, SU C Y, et al. Modeling and control of piezo-actuated nanopositioning stages: A survey[J]. IEEE Transactions on Automation Science and Engineering, 2016, 13(1): 313-332. doi: 10.1109/TASE.2014.2352364
|
| [7] |
GAO X H, LIU Y G. Research on control strategy in giant magnetostrictive actuator based on Lyapunov stability[J]. IEEE Access, 2019, 7: 77254-77260. doi: 10.1109/ACCESS.2019.2920853
|
| [8] |
LEE S H, OZER M B, ROYSTON T J. Piezoceramic hysteresis in the adaptive structural vibration control problem[J]. Journal of Intelligent Material Systems and Structures, 2002, 13(2-3): 117-124. doi: 10.1177/104538902761402512
|
| [9] |
MING M, FENG Z, LING J, et al. Hysteresis modelling and feedforward compensation of piezoelectric nanopositioning stage with a modified Bouc-Wen model[J]. Micro & Nano Letters, 2018, 13(8): 1170-1174.
|
| [10] |
MAYERGOYZ I D, FRIEDMAN G. Generalized preisach model of hysteresis[J]. IEEE Transactions on Magnetics, 1988, 24(1): 212-217. doi: 10.1109/20.43892
|
| [11] |
SHEN J C, JYWE W Y, CHIANG H K, et al. Precision tracking control of a piezoelectric-actuated system[J]. Precision Engineering, 2008, 32(2): 71-78. doi: 10.1016/j.precisioneng.2007.04.002
|
| [12] |
LI Z, ZHANG X Y, SU C Y, et al. Nonlinear control of systems preceded by preisach hysteresis description: A prescribed adaptive control approach[J]. IEEE Transactions on Control Systems Technology, 2016, 24(2): 451-460.
|
| [13] |
AL JANAIDEH M, RAKOTONDRABE M. Precision motion control of a piezoelectric cantilever positioning system with rate-dependent hysteresis nonlinearities[J]. Nonlinear Dynamics, 2021, 104(4): 3385-3405. doi: 10.1007/s11071-021-06460-w
|
| [14] |
田雷, 陈俊杰, 崔玉国, 等. 基于PI迟滞模型的单压电变形镜开环控制[J]. 仪器仪表学报, 2017, 38(1): 136-142. doi: 10.3969/j.issn.0254-3087.2017.01.018
TIAN L, CHEN J J, CUI Y G, et al. Open-loop control of unimorph piezoelectric deformable mirror based on PI hysteresis model[J]. Chinese Journal of Scientific Instrument, 2017, 38(1): 136-142(in Chinese). doi: 10.3969/j.issn.0254-3087.2017.01.018
|
| [15] |
贾高欣, 王贞艳. 压电陶瓷作动器的率相关迟滞建模与内模控制[J]. 压电与声光, 2019, 41(1): 130-134. doi: 10.11977/j.issn.1004-2474.2019.01.030
JIA G X, WANG Z Y. Modeling of rate-dependent hysteresis and internal model control of piezoelectric ceramic actuators[J]. Piezoelectrics & Acoustooptics, 2019, 41(1): 130-134(in Chinese). doi: 10.11977/j.issn.1004-2474.2019.01.030
|
| [16] |
黄卫清, 史小庆, 王寅. 菱形压电微位移放大机构的设计[J]. 光学 精密工程, 2015, 23(3): 803-809. doi: 10.3788/OPE.20152303.0803
HUANG W Q, SHI X Q, WANG Y. Design of diamond piezoelectric micro displacement amplification mechanism[J]. Optics and Precision Engineering, 2015, 23(3): 803-809(in Chinese). doi: 10.3788/OPE.20152303.0803
|
| [17] |
邰明皓, 朱玉川, 江裕雷, 等. 双压电二维叠堆执行器控制实验研究[J]. 压电与声光, 2021, 43(2): 254-259.
TAI M H, ZHU Y C, JIANG Y L, et al. Experimental research on control of dual piezoelectric two-dimensional stack actuators[J]. Piezoelectrics & Acoustooptics, 2021, 43(2): 254-259(in Chinese).
|
| [18] |
江裕雷, 朱玉川, 陈龙, 等. 径向双压电叠堆执行器建模与实验研究[J]. 压电与声光, 2021, 43(1): 45-50.
JIANG Y L, ZHU Y C, CHEN L, et al. Modeling and experimental study on radial dual-piezoelectric stack actuator[J]. Piezoelectrics & Acoustooptics, 2021, 43(1): 45-50(in Chinese).
|
| [19] |
KUHNEN K. Modeling, identification and compensation of complex hysteretic nonlinearities: A modified Prandtl-Ishlinskii approach[J]. European Journal of Control, 2003, 9(4): 407-418. doi: 10.3166/ejc.9.407-418
|
| [20] |
田雷. 基于PI迟滞模型的压电变形镜控制技术研究[D]. 宁波: 宁波大学, 2017: 14-16.
TIAN L. Control of piezoelectric deformable mirror based on PI hysteresis model[D]. Ningbo: Ningbo University, 2017: 14-16 (in Chinese).
|
| [21] |
GAN J Q, ZHANG X M, WU H. A generalized Prandtl-Ishlinskii model for characterizing the rate-independent and rate-dependent hysteresis of piezoelectric actuators[J]. The Review of Scientific Instruments, 2016, 87(3): 035002. doi: 10.1063/1.4941941
|
| [22] |
GAN J Q, ZHANG X M. Modeling of rate-dependent hysteresis in piezoelectric actuators based on a modified Prandtl-Ishlinskii model[J]. International Journal of Applied Electromagnetics and Mechanics, 2015, 49(4): 557-565. doi: 10.3233/JAE-150070
|
| [23] |
郑军辉, 崔玉国, 蔡成波, 等. 串联死区算子的压电微夹钳PI迟滞模型[J]. 压电与声光, 2015, 37(4): 650-654.
ZHENG J H, CUI Y G, CAI C B, et al. Research on PI hysteresis model with dead-zero operator of piezoelectric micro-gripper[J]. Piezoelectrics & Acoustooptics, 2015, 37(4): 650-654(in Chinese).
|
| [24] |
雷军委, 晋玉强, 王宏. 基于Lyapunov与混沌激励的自适应参数辨识[M]. 成都: 西南交通大学出版社, 2016: 1-5.
LEI J W, JIN Y Q, WANG H. Adaptive parameters identification based on Lyapunov function and chaotic excitation[M]. Chengdu: Southwest Jiaotong University Press, 2016: 1-5 (in Chinese).
|
| [25] |
顾寒烈. 压电驱动型主动隔振技术研究[D]. 南京: 南京亚洲成人在线一二三四五六区, 2018: 41-49.
GU H L. Research on active vibration isolation with piezoelectric actuators[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018: 41-49 (in Chinese) .
|
Figures(14) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.




 DownLoad:
DownLoad: