| Citation: | FANG Hairong, WANG Li, ZHANG Haiqiang, et al. Design and analysis of a novel parallel mechanism with closed-loop limbs[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(3): 454-463. doi: 10.13700/j.bh.1001-5965.2018.0411(in Chinese)

|
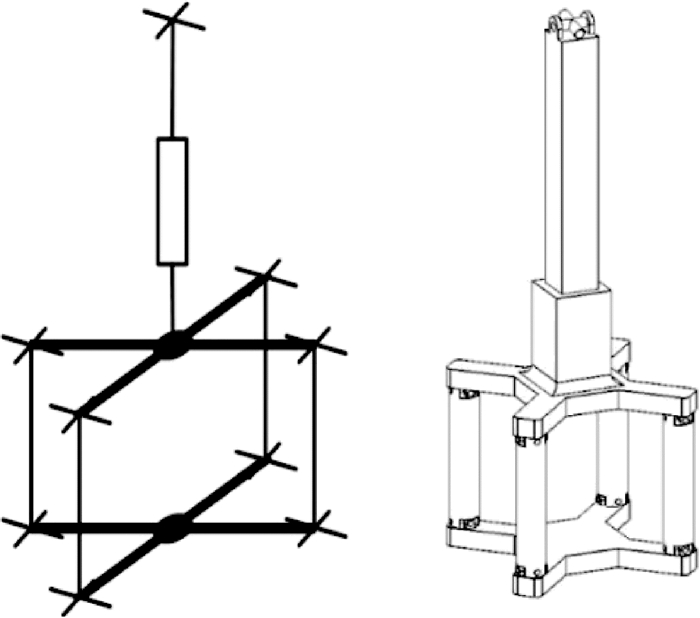
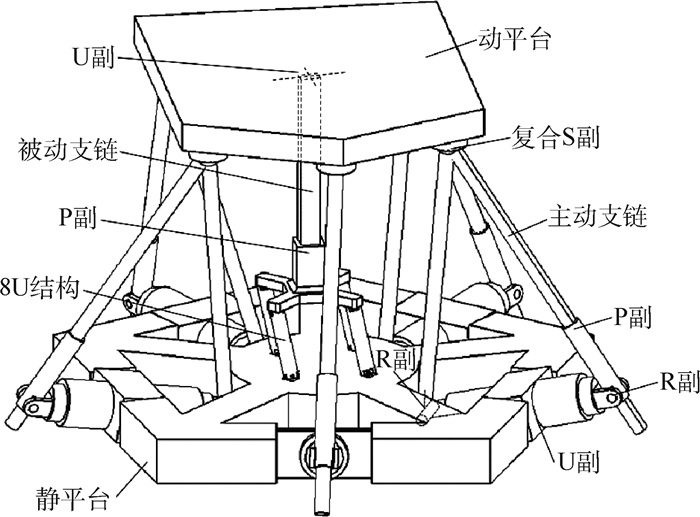
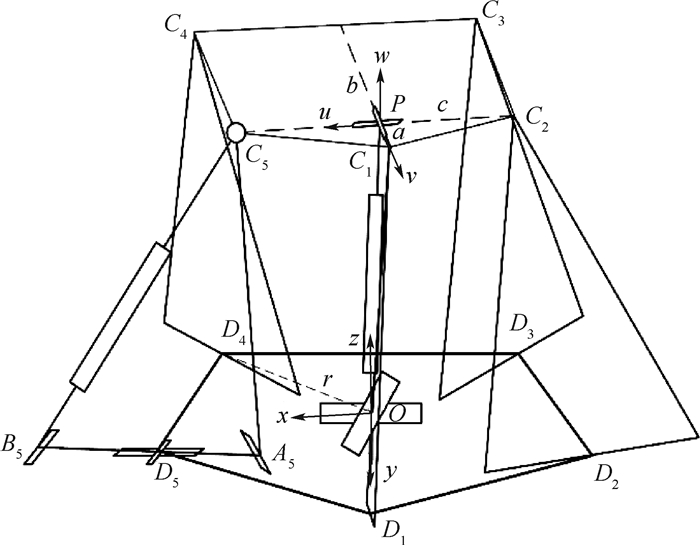
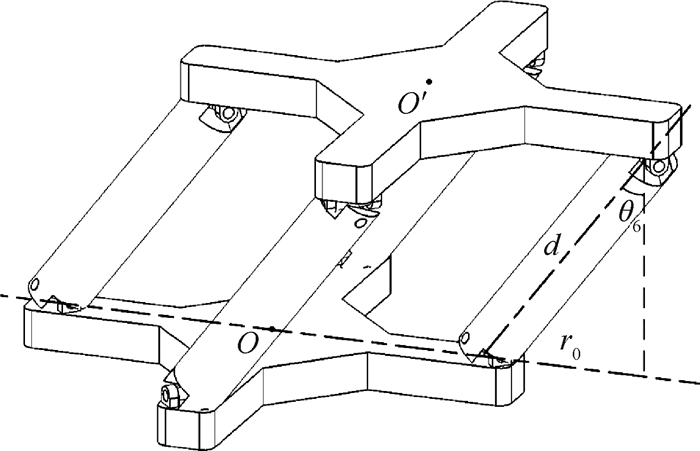
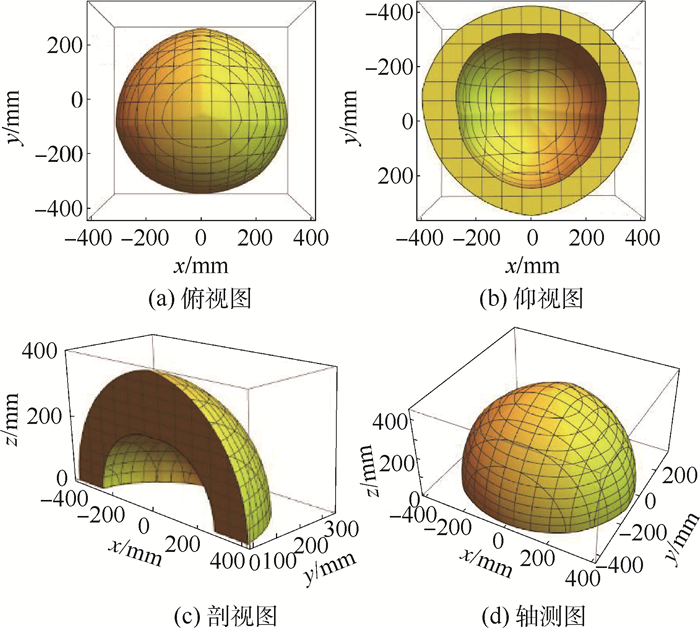
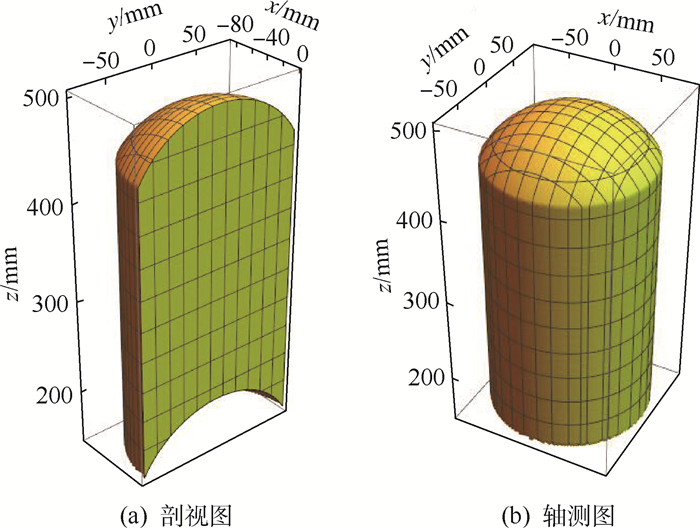
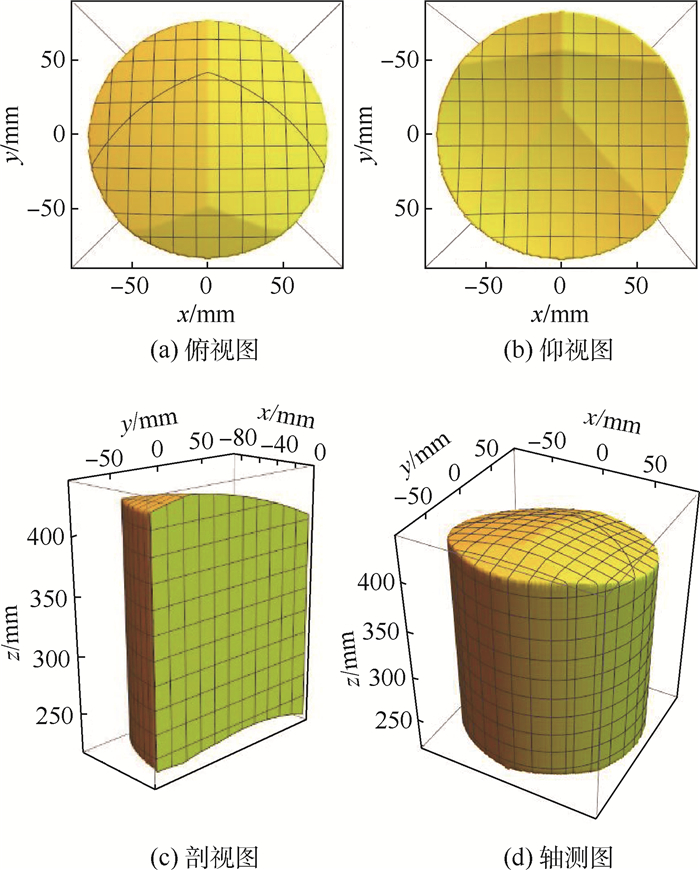
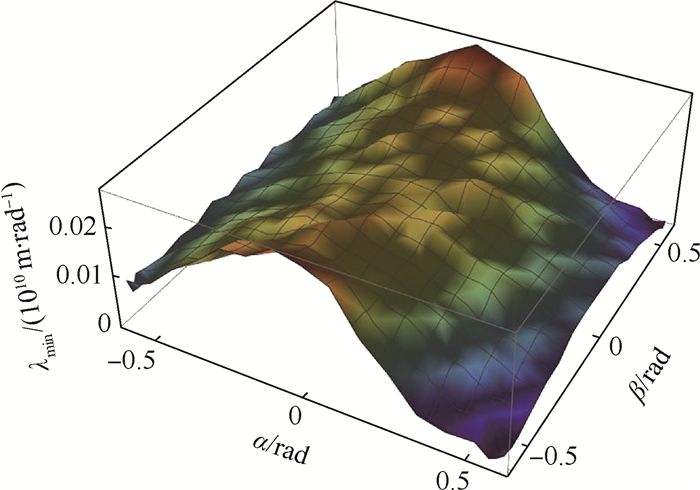
In order to meet the requirements of high stiffness and accuracy of the position and posture adjusting mechanism in the assembly process of spacecraft shell, a novel 5-U(RRP)S/(8U)PU parallel mechanism with closed-loop limbs, which are improved from conventional limb structure, is proposed and analyzed. The degree of freedom of the mechanism is calculated by screw theory. The positional positive and negative solutions are figured out through establishing the seal vector constraints equation. The complete Jacobian matrix is calculated by screw theory. The fixed posture workspace is drawn by the restrained link length. The changes of mechanism stiffness with the position and posture are analyzed by solving the static stiffness matrix. The software is used to simulate and compare with the general mechanism. Through the above analysis, the feasibility and practical application value are verified, which lays the foundation for the automatic assembly process of spacecraft shell.

| [1] |
谷良贤, 龚春林.航天飞行器设计[M].西安:西北工业大学出版社, 2016:37-40.
GU L X, GONG C L.Design of aerospace vehicle[M].Xi'an:Northwestern Polytechnical University Press, 2016:37-40(in Chinese).
|
| [2] |
刘鹏程, 杜毅民.导弹总体测试工程化的几个问题[J].航空兵器, 2006(4):50-53. doi: 10.3969/j.issn.1673-5048.2006.04.013
LIU P C, DU Y M.Problems of engineering design for missile system test[J].Aero Weaponry, 2006(4):50-53(in Chinese). doi: 10.3969/j.issn.1673-5048.2006.04.013
|
| [3] |
马政伟, 李卫东, 万敏, 等.飞机侧壁部件装配调姿机构的设计与分析[J].北京亚洲成人在线一二三四五六区学报, 2014, 40(2):280-284.
MA Z W, LI W D, WAN M, et al.Design and analysis of flexible fixture for aircraft side panels[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(2):280-284(in Chinese).
|
| [4] |
文福安, 杨光.并联机器人机构概述[J].机械科学与技术, 2000, 19(1):69-72. doi: 10.3321/j.issn:1003-8728.2000.01.026
WEN F A, YANG G.Summary of parallel robot mechanism[J].Mechanical Science and Technology, 2000, 19(1):69-72(in Chinese). doi: 10.3321/j.issn:1003-8728.2000.01.026
|
| [5] |
KONG X.Type synthesis of 5-DOF parallel manipulators based on screw theory[M].New York:John Wiley & Sons, 2005.
|
| [6] |
LI Q C, HUANG Z, HERV J M.Displacement manifold method for type synthesis of lower-mobility parallel mechanisms[J].Science in China, 2004, 47(6):641-650. doi: 10.1360/03ye0352
|
| [7] |
杨廷力.机器人机构拓扑结构学[M].北京:机械工业出版社, 2004:12-16.
YANG T L.Topology structure design of robot mechanisms[M].Beijing:China Machine Press, 2004:12-16(in Chinese).
|
| [8] |
唐卫星, 马履中, 石奇端, 等.3T-2R五自由度并联机构的型综合[J].中国机械工程, 2007, 18(20):2460-2463. doi: 10.3321/j.issn:1004-132x.2007.20.016
TANG W X, MA L Z, SHI Q D, et al.Type synthesis of 3T-2R parallel mechanism[J].China Mechanical Engineering, 2007, 18(20):2460-2463(in Chinese). doi: 10.3321/j.issn:1004-132x.2007.20.016
|
| [9] |
李秦川.对称少自由度并联机器人型综合理论及新机型综合[D].秦皇岛: 燕山大学, 2003: 57-68.
LI Q C.Type synthesis theory of lower-mobility parallel mechanisms and synthesis of new architectures[D].Qinhuangdao: Yanshan University, 2003: 57-68(in Chinese).
|
| [10] |
SONG Y M, LIAN B B, SUN T, et al.A novel five-degree-of-freedom parallel manipulator and its kinematic optimization[J].Journal of Mechanisms and Robotics, 2014, 6(4):041008. doi: 10.1115/1.4027742
|
| [11] |
DONG C, LIU H, YUE W, et al.Stiffness modeling and analysis of a novel 5-DOF hybrid robot[J].Mechanism and Machine Theory, 2018, 125:80-93. doi: 10.1016/j.mechmachtheory.2017.12.009
|
| [12] |
XU P, CHEUNG C F, LI B, et al.Kinematics analysis of a hybrid manipulator for computer controlled ultra-precision freeform polishing[J].Robotics and Computer-Integrated Manufacturing, 2017, 44:44-56. doi: 10.1016/j.rcim.2016.08.003
|
| [13] |
刘建坤.基于五自由度并联机构的隔振平台研究[D].哈尔滨: 哈尔滨工业大学, 2013: 7-19.
LIU J K.Research of a vibration isolation platform based on 5-DOF parallel mechanism[D].Harbin: Harbin Institute of Technology, 2013: 7-19(in Chinese).
|
| [14] |
SUN T, SONG Y M, DONG G, et al.Optimal design of a parallel mechanism with three rotational degrees of freedom[J].Robotics and Computer-Integrated Manufacturing, 2012, 28:500-508. doi: 10.1016/j.rcim.2012.02.002
|
| [15] |
杨会, 房海蓉, 李典, 等.一种新型并联灌注机器人运动学分析和多目标优化[J].北京亚洲成人在线一二三四五六区学报, 2018, 44(3):568-575.
YANG H, FANG H R, LI D, et al.Kinematics analysis and multi-objective optimization of a novel parallel perfusion robot[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3):568-575(in Chinese).
|
| [16] |
XIE F, LIU X J, WANG J, et al.Kinematic optimization of a five degrees-of-freedom spatial parallel mechanism with large orien-tational workspace[J].Journal of Mechanisms and Robotics, 2017, 9(5):051005. doi: 10.1115/1.4037254
|
| [17] |
LIU C H, LI R M, YAO Y A.An omnidirectional rolling 8U parallel mechanism[J].Journal of Mechanisms and Robotics, 2012, 4(3):034501. doi: 10.1115/1.4006657
|
| [18] |
KONG X, GOSSELIN C M.Type synthesis of parallel mechanisms[M].Berlin:Springer, 2007.
|
| [19] |
JOSHI S A, TSAI L W.Jacobian analysis of limited-DOF parallel manipulators[J].Journal of Mechanical Design, 2002, 124(2):254-258. doi: 10.1115/1.1469549
|
| [20] |
TSAI L W.Robot analysis and design:The mechanics of serial and parallel manipulators[M].New York:John Wiley & Sons, 1999.
|
| [21] |
赵永生, 郑魁敬, 李秦川, 等.5-UPS/PRPU 5自由度并联机床运动学分析[J].机械工程学报, 2004, 40(2):12-16.
ZHAO Y S, ZHENG K J, LI Q C, et al.Kinematic analysis of 5-UPS/PRPU 5-DOF parallel machine tool[J].Journal of Mechanical Engineering, 2004, 40(2):12-16(in Chinese).
|

Figures(15) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: