| Citation: | ZHANG Haoyue, CHENG Xiaoqi, LIU Chang, et al. Visual localization technology of AGV based on global sparse map[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(1): 218-226. doi: 10.13700/j.bh.1001-5965.2018.0272(in Chinese)

|
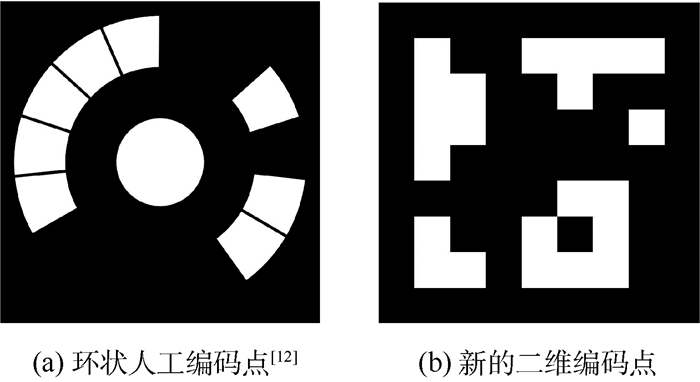
In order to realize the high-precision localization of automated guided vehicle (AGV) in complex industrial environment and overcome the influence of environment change, a vision localization method based on a global sparse map was proposed. First, a large-capacity two-dimensional coded point was designed, which was set on the ground as an artificial landmark. Based on a quad recognition algorithm, the coded points were accurately segmented and identified in complex industrial environment. The feature points from different images were properly matched by using the coded information provided by coded points. Then, a block-optimization three-dimensional reconstruction algorithm was designed to build a map for a large-scale industrial environment, which provided a sparse electronic map for AGV visual localization. The visual localization of AGV was realized by matching the feature points from the visual sensor and sparse electronic maps. The repeated precision of AGV is less than 0.5 mm, the angle deviation is less than 0.5°, and the average displacement error of trajectory is less than 0.1%. The practical application shows that the method can realize the visual localization of AGV in complex industrial environment. The speed and precision of localization both meet the requirements of industrial application, which provides a new way for vision-based localization of AGV.

| [1] |
张建鹏, 楼佩煌, 钱晓明, 等.多窗口实时测距的视觉导引AGV精确定位技术研究[J].仪器仪表学报, 2016, 37(6):1356-1365. doi: 10.3969/j.issn.0254-3087.2016.06.020
ZHANG J P, LOU P H, QIAN X M, et al.Research on precise positioning technology by multi-window and real-time measurement for visual navigation AGV[J].Chinese Journal of Scientific Instrument, 2016, 37(6):1356-1365(in Chinese). doi: 10.3969/j.issn.0254-3087.2016.06.020
|
| [2] |
KIM J, CHUNG W.Localization of a mobile robot using a laser range finder in a glass-walled environment[J].IEEE Transactions on Industrial Electronics, 2016, 63(6):3616-3627. doi: 10.1109/TIE.2016.2523460
|
| [3] |
CESAR C, LUCA C, HENRY C, et al.Past, present, and future of simultaneous localization and mapping:Toward the robust-perception age[J].IEEE Transactions on Robotics, 2016, 32(6):1309-1332. doi: 10.1109/TRO.2016.2624754
|
| [4] |
RUBLEE E, RABAUD V, KONOLIG K, et al.ORB: An efficient alternative to SIFT or SURF[C]//International Conference on Computer Vision.Piscataway, NJ: IEEE Press, 2012: 2564-2571.
|
| [5] |
LOWE D G.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision, 2004, 60(2):91-110. doi: 10.1023/B:VISI.0000029664.99615.94
|
| [6] |
LU Y, SONG D.Visual navigation using heterogeneous landmarks and unsupervised geometric constraints[J].IEEE Transactions on Robotics, 2017, 31(3):736-749.
|
| [7] |
ROLAND S, ILLAH R N, DAVIDE S, et al.Introduction to sutonomous mobile robots[M].Cambridge:MIT Press, 2010:345-346.
|
| [8] |
曹天扬, 蔡元浩, 东方明, 等.结合图像内容匹配的机器人视觉导航定位与全局地图构建系统[J].光学精密工程, 2017, 25(8):2222-2232.
CAO T Y, CAI Y H, DONG F M, et al.Robot vision system for keyframe global map establishment and robot localization based on graphic content mathing[J].Optics and Precision Engineering, 2017, 25(8):2222-2232(in Chinese).
|
| [9] |
WULF O, LECKING D, WAGNER B.Robust self-localization in industrial environments based on 3D ceiling structures[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway, NJ: IEEE Press, 2007: 1530-1534.
|
| [10] |
DAVIDE R, ROBERTO O, CRISTIAN S, et al.AGV global localization using indistinguishable artificial landmarks[C]//IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2011: 287-292.
|
| [11] |
杨剑, 韩建栋, 秦品乐.视觉测量中可纠错的编码点识别及提取[J].光学精密工程, 2012, 20(10):2293-2299.
YANG J, HAN J D, QIN P L.Correcting error on recognition of coded points for photogrammetry[J].Optics and Precision Engineering, 2012, 20(10):2293-2299(in Chinese).
|
| [12] |
段康容, 刘先勇.摄影测量中编码标记点检测算法研究[J].传感器与微系统, 2010, 29(8):74-77. doi: 10.3969/j.issn.1000-9787.2010.08.024
DUAN K R, LIU X Y.Detection algorithm on circular encoded point in photogrammetry[J].Transducer and Microsystem Technologies, 2010, 29(8):74-77(in Chinese). doi: 10.3969/j.issn.1000-9787.2010.08.024
|
| [13] |
CANNY J.A computational approach to edge detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, PAMI-8(6):679-698. doi: 10.1109/TPAMI.1986.4767851
|
| [14] |
HARRIS C, STEPHENS M.A combined corner and edge detector[C]//Proceedings of the 4th Alvey Vision Conference, 1988: 147-151.
|
| [15] |
ANDERSON K R.A reevaluation of an efficient algorithm for determining the convex hull of a finite planar set[J].Information Processing Letters, 1978, 7(1):53-55. doi: 10.1016/0020-0190(78)90041-8
|
| [16] |
RICHARD H, ANDREW Z.Multiple view geometry in computer vision[M].Cambridge:Cambridge University Press, 2004:159-173.
|
| [17] |
ANDREAS G, PHILIP L, RAQUEL U.Are we ready for autonomous driving The KITTI vision benchmark suite[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ: IEEE Press, 2012: 3354-3361.
|
Figures(10) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad:








