| Citation: | ZHOU Guozhe, FU Yongling, QI Haitao, et al. Force based impedance control of electro-hydrostatic actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(1): 93-99. doi: 10.13700/j.bh.1001-5965.2016.0094(in Chinese)

|
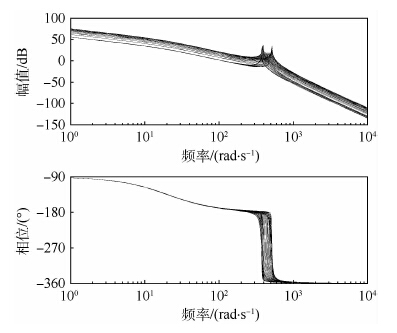
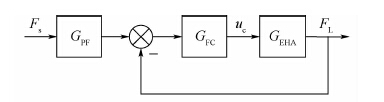
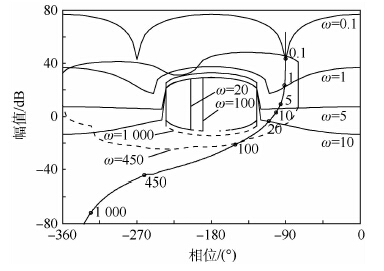
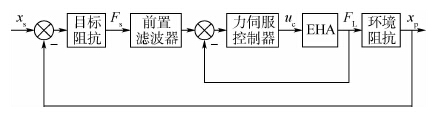
As a kind of compliance control method, impedance control can realize force and position coordination control. So it has obvious advantages in the applications that the actuating systems are required to interact with the environments. Because of high energy efficiency and compact structure, electro-hydrostatic actuator (EHA) with force based impedance control has an extensive prospect. The force controller of EHA is the foundation of the impedance control. Due to the uncertain external load characteristics in impedance control and the time-invariant parameters of EHA, the quantitative feedback theory (QFT) was employed to design the force controller. The mathematical model of EHA was analyzed first. Then the uncertainty range of the controlled plant was combined with the performance specifications of the system to quantitatively plot the boundaries on the Nichols chart. The open-loop frequency characteristic curve of the nominal element was adjusted to satisfy the limitations of boundaries and the force controller was completed simultaneously. The force control and static/dynamic impedance control experiments under various load characteristics were conducted to examine the efficacy of the system. The experimental results demonstrate that the force controller designed by QFT method has sufficient robustness and the impedance control of EHA is achieved successfully.

| [1] |
HOGAN N.Impedance control:An approach to manipulation,Parts Ⅰ,Ⅱ,Ⅲ[J].Journal of Dynamic Systems,Measurement,and Control,1985,107(1):1-24. doi: 10.1115/1.3140702
|
| [2] |
KAZEROONI H.Automated robotic deburring using impedance control[J].Control Systems Magazine,1988,8(1):21-25. doi: 10.1109/37.464
|
| [3] |
ERHAN A G,MEHMET A A.The design and control of a therapeutic exercise robot for lower limb rehabilitation:Physiotherabot[J].Mechatronics,2011,21(3):509-522. doi: 10.1016/j.mechatronics.2011.01.005
|
| [4] |
RICHARDSON R,BROWN M,BHAKTA B,et al.Design and control of a three degree of freedom pneumatic physiotherapy robot[J].Robotica,2003,21(6):589-604. doi: 10.1017/S0263574703005320
|
| [5] |
OTT C,ALBU-SCHAFFER A,KUGI A,et al.On the passivity-based impedance control of flexible joint robots[J].IEEE Transactions on Robotics,2008,24(2):416-429. doi: 10.1109/TRO.2008.915438
|
| [6] |
IRAWAN A,NONAMI K.Optimal impedance control based on body inertia for a hydraulically driven hexapod robot walking on uneven and extremely soft terrain[J].Journal of Field Robotics,2011,28(5):690-713. doi: 10.1002/rob.20404
|
| [7] |
HA Q P,NGUYEN Q H,RYE D C,et al.Impedance control of a hydraulically actuated robotic excavator[J].Automation in Construction,2000,9(5):421-435.
|
| [8] |
TAFAZOLI S,SALCUDEAN S E,HASHTRUDI-ZAAD K,et al.Impedance control of a teleoperated excavator[J].IEEE Transactions on Control Systems Technology,2002,10(3):355-367. doi: 10.1109/87.998021
|
| [9] |
FATEH M M,ALAVI S S.Impedance control of an active suspension system[J].Mechatronics,2009,19(1):134-140. doi: 10.1016/j.mechatronics.2008.05.005
|
| [10] |
FATEH M M.Robust impedance control of a hydraulic suspension system[J].International Journal of Robust and Nonlinear Control,2010,20(8):858-872.
|
| [11] |
FATEH M M,ZIRKOHI M M.Adaptive impedance control of a hydraulic suspension system using particle swarm optimization[J].Vehicle System Dynamics,2011,49(12):1951-1965. doi: 10.1080/00423114.2011.564289
|
| [12] |
KAMINAGA H,ONO J,NAKASHIMA Y,et al.Development of backdrivable hydraulic joint mechanism for knee joint of humanoid robots[C]//Robotics and Automation.Piscataway,NJ:IEEE Press,2009:1577-1582.
|
| [13] |
KAMINAGA H, AMARI T,KATAYAMA Y,et al.Backdrivability analysis of electro-hydrostatic actuator and series dissipative actuation model[C]//Robotics and Automation.Piscataway,NJ:IEEE Press,2010:4204-4211.
|
| [14] |
KAMINAGA H,AMARI T,NIWA Y,et al.Development of knee power assist using backdrivable electro-hydrostatic actuator[C]//Intelligent Robots and Systems.Piscataway,NJ:IEEE Press,2010:5517-5524.
|
| [15] |
YANIV O.Quantitative feedback design of linear and nonlinear control systems[M].Massachusetts:Kluwer Academic Publishers,1999:17-18.
|
| [16] |
马纪明,付永领,高波.基于定量反馈理论的EHA控制器设计[J].北京亚洲成人在线一二三四五六区学报,2006,32(5):553-557.
MA J M,FU Y L,GAO B.EHA controller design based quantitative feedback theory[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(5):553-557(in Chinese).
|
| [17] |
郭彦青,付永领,张朋,等.电液负载模拟器摩擦参数辨识及补偿[J].北京亚洲成人在线一二三四五六区学报,2014,40(9):1256-1262.
GUO Y Q,FU Y L,ZHANG P,et al.Friction parameter identification and compensation for electro-hydraulic load simulator[J].Journal of Beijing University of Aeronautics and Astronautics,2014,40(9):1256-1262(in Chinese).
|

Figures(9) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: