



Ground risk quantitative assessment for UAV operations in urban low-altitude scenarios
-
摘要:
为保证无人机(UAV)在城市低空安全运行,构建UAV运行的地面风险量化评估模型,提出使用考虑多因素多层次的对地风险地图,来定义与UAV相关的对地风险,量化风险程度。分析城市低空典型特征和UAV坠地事故因果链,建立多因素影响下的地面风险量化评估模型;考虑UAV的下降行为和风参数的不确定性,计算UAV坠地的影响区域概率密度函数;通过结合城市区域地图、人口密度、遮蔽效应、障碍物和禁飞区多个图层,计算每个地理参考单元的风险值,生成大区域范围的地面风险地图。基于真实算例对所建模型进行验证分析,结果表明:不同城市区域的风险分布区别明显,风险程度与人口密度分布、地表遮蔽效果、地面障碍物高度分布、城市禁飞区的划设及UAV飞行高度密切相关;UAV在运行中应用地面风险地图,有利于识别所飞越区域的风险程度,避开高风险区域,提高在城市低空运行的安全性。
Abstract:A ground risk assessment model for unmanned aerial vehicle (UAV) operation was developed in order to guarantee the safe operation of UAVs in low-altitude urban areas. It was proposed that a ground risk map that considered multi-factors and multi-levels be used to define the ground risk associated with UAVs and quantify the degree of risk to the ground from flight operations over different areas. First, the typical characteristics of urban low-altitude and the causal chain of UAV crash-landing accidents were analyzed to establish a quantitative ground risk assessment model under the influence of multiple factors, and analyze in detail the mechanism of the influence of each factor on the ground risk. Second, to determine the chance of the danger happening at various locations, the probability density function of the impact region of a UAV crash-landing was computed while accounting for the UAV’s descending behavior and the uncertainty of the wind parameter. Then, the risk value of each geographic reference unit was calculated by combining multiple layers such as urban area map, population density, shelter effect, obstacles and no-fly zones; then the ground risk map of a large regional scale was generated, which can intuitively show the risk level of different areas of the city. Finally, the proposed method was validated and analyzed based on real examples. The findings demonstrate that there are clear differences in the risk distribution across different urban areas, and that the risk level is strongly correlated with the distribution of population density, the impact of surface shelter, the distribution of ground-level obstacle heights, the designation of the city’s no-fly zones, and the UAV’s flight height. The application of ground-based risk maps in the operation of UAVs will help to identify the level of danger of the areas flown over, avoid high-risk areas, and enhance operational safety in urban low-altitude.
-
Key words:
- urban low-altitude /
- ground risk /
- multiple factors /
- risk assessment /
- risk map /
- operational safety
-
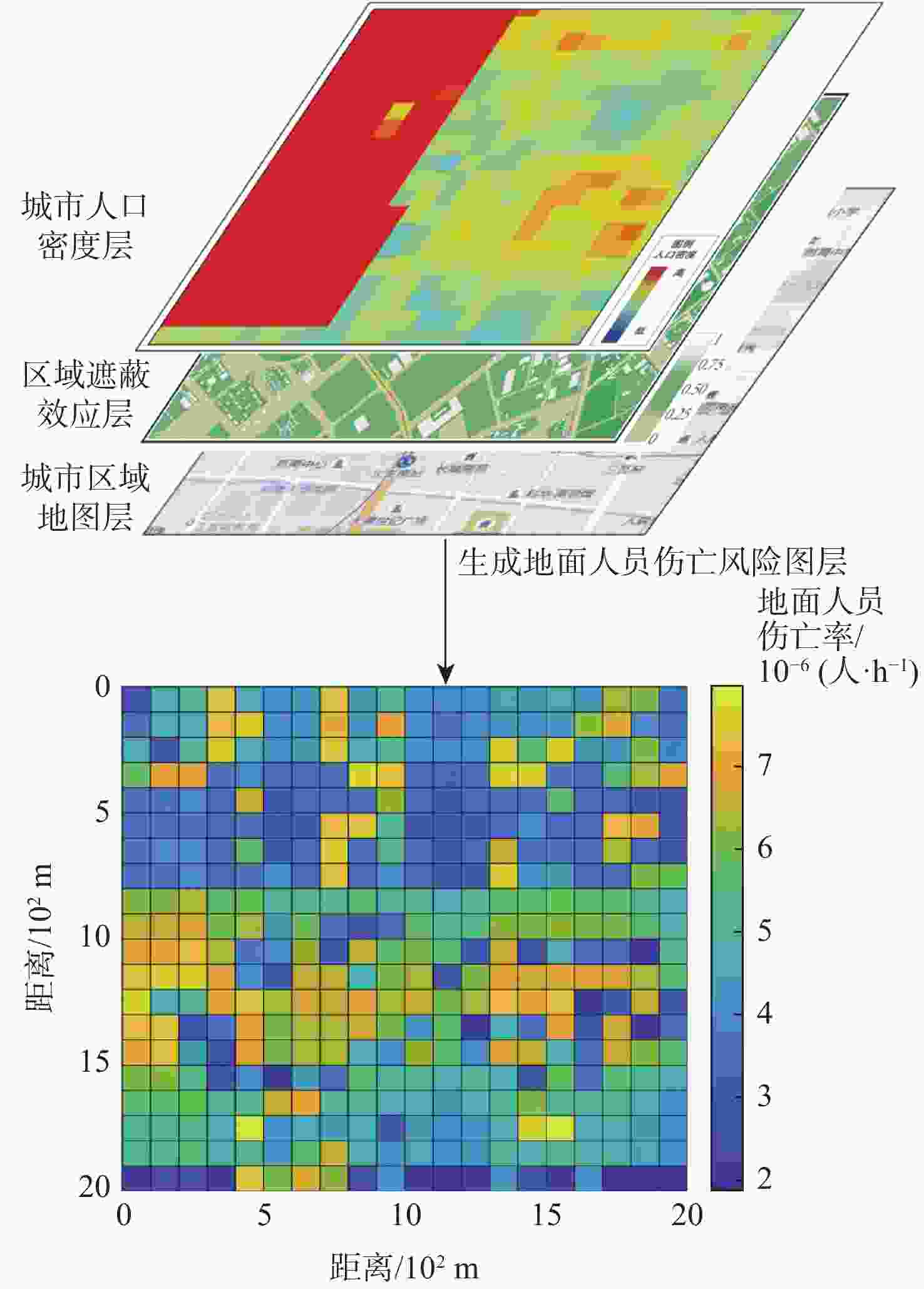
图 12 地面人员伤亡风险层生成过程框架
Figure 12. Framework of the process of generating the ground fatality risk layer
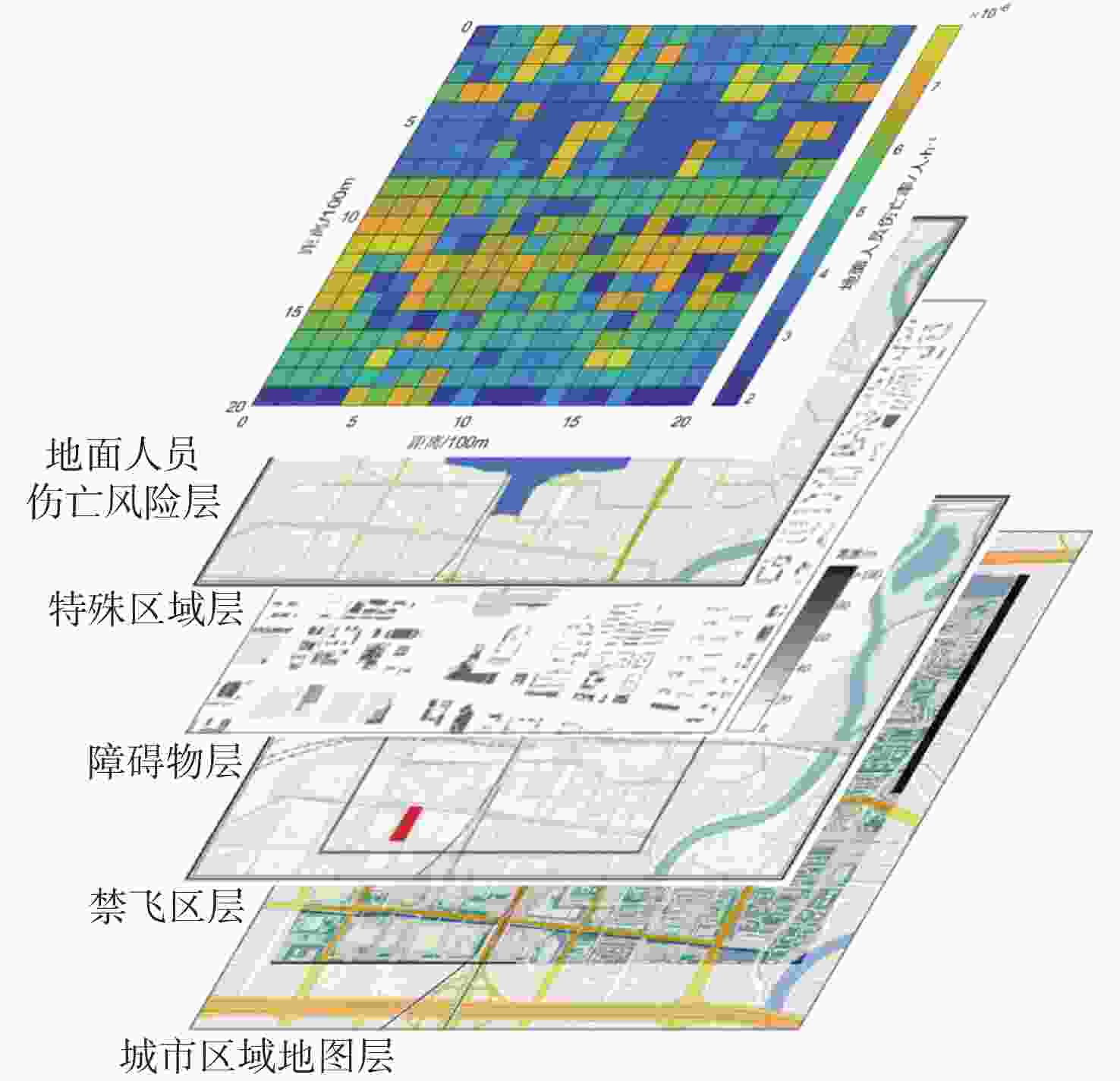
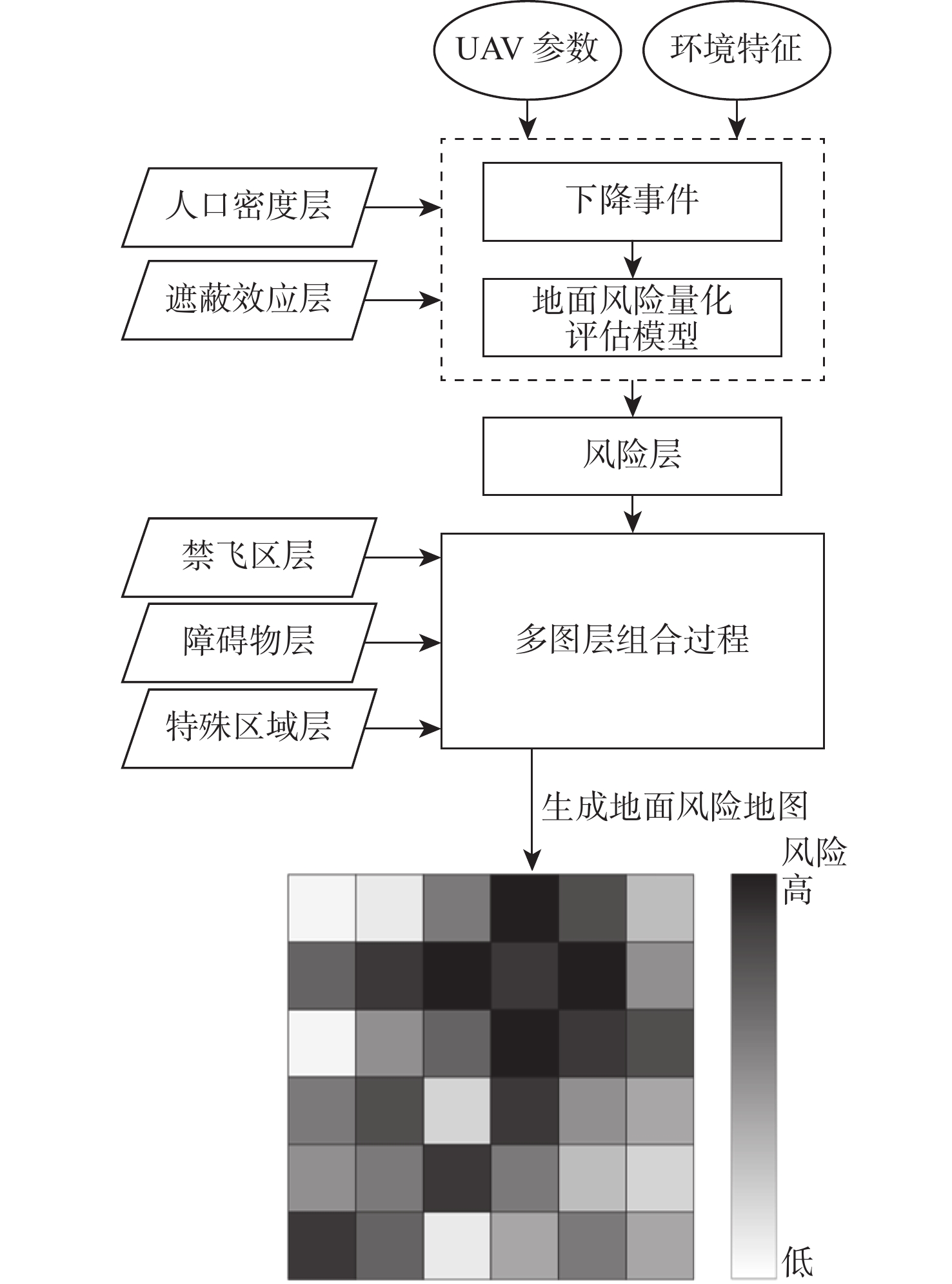
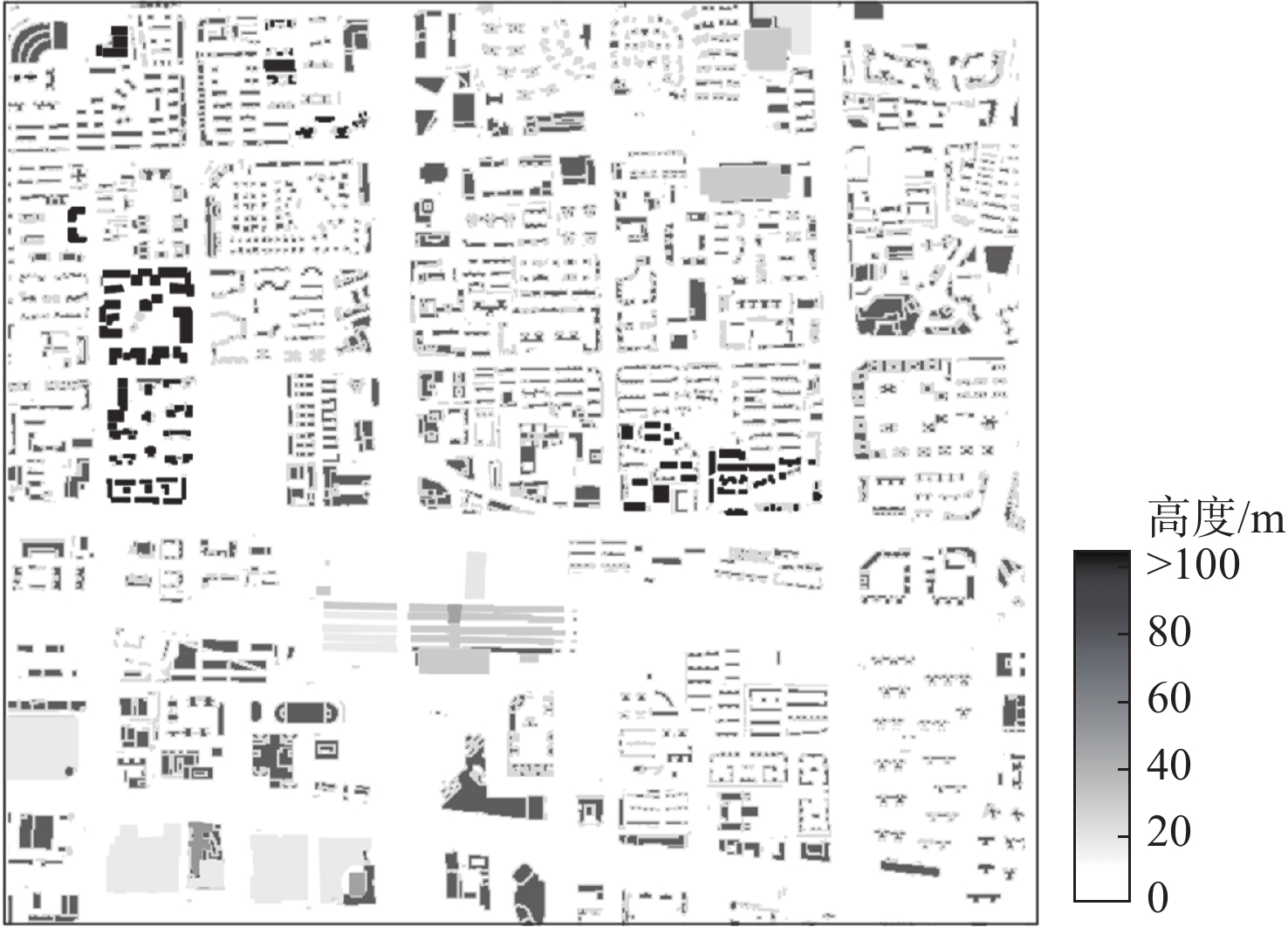
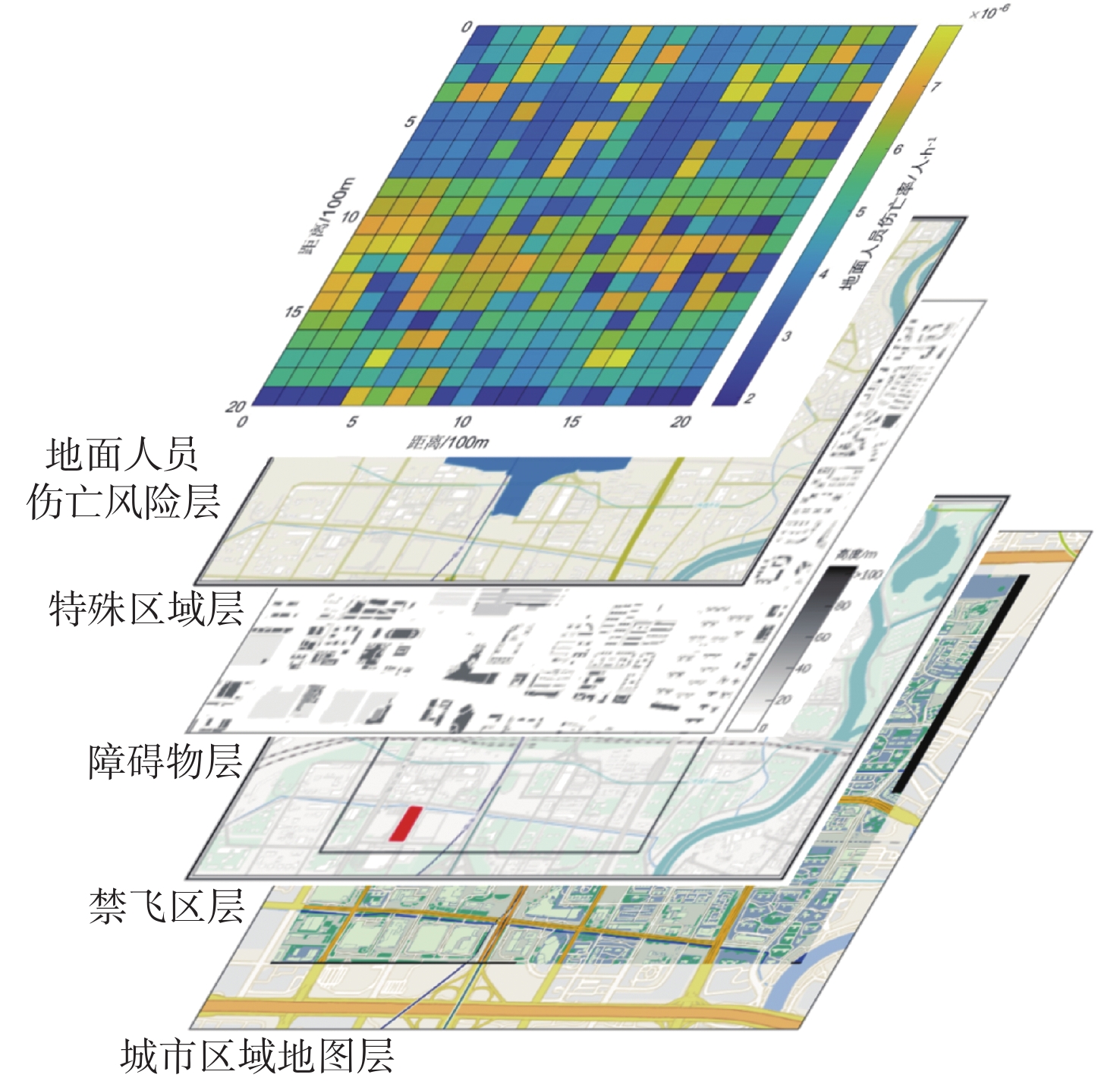
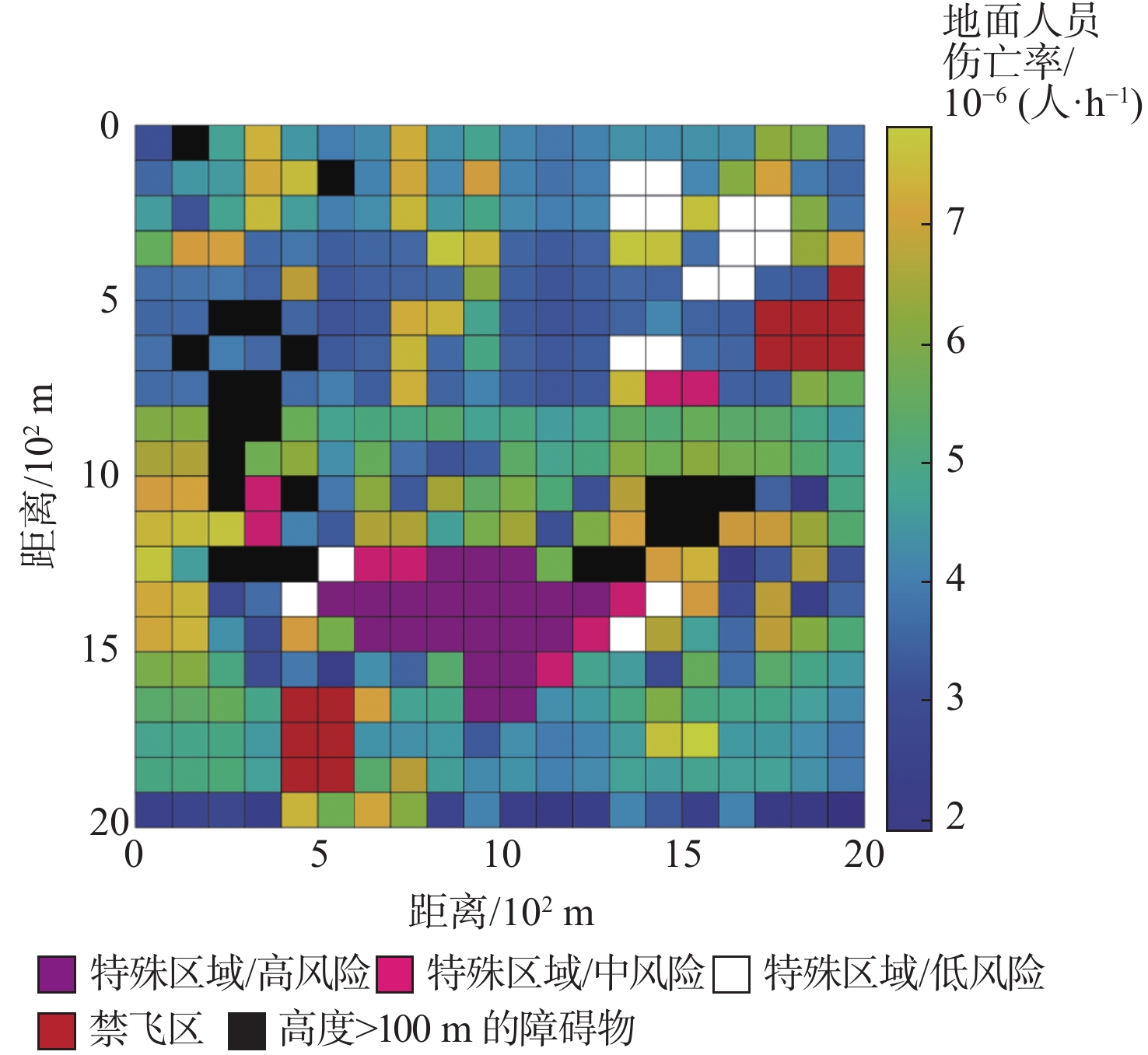
图 13 多层叠加式的地面风险地图生成过程
Figure 13. Process of generating ground risk map with multiple layers
表 1 特殊区域风险等级分类
Table 1. Classification of risk levels in special areas
特殊区域 风险等级 发电厂、大型车站、易燃易爆仓库、易发生
火灾和水污染的区域高风险 大型加油站、中型车站、中型码头和港口区域 中风险 医院、学校等人群聚集区 低风险 其他正常区域 安全  下载: 导出CSV
下载: 导出CSV
表 2 风险等级评定指标
Table 2. Risk levels rating indicators
风险值 风险等级 <1 高风险 <10−4 中风险 <10−5 低风险 <10−6 安全或无风险
下载: 导出CSV
表 3 模型参数
Table 3. Model parameters
λevent m/kg v0/(m·s−1) h0/m g/(m·s−1) 空气阻力
系数Cd6.71×10−6 6.14 20 N (100, 2) 9.8 0.4 |vwind|/(m·s−1) rp/m RUAV/m hp/m |vmax|/(m·s−1) β/J N (10, 2) 0.25 0.44 1.65 23 34
下载: 导出CSV
-
[1] 陈志杰. 依法助推低空经济发展[EB/OL]. (2023-06-29)[2024-03-24]. http://www.gov.cn/zhengce/202306/content_6888958.htm.CHEN Z J. Promoting low-altitude economic development in accordance with the law[EB/OL]. (2023-06-29)[2024-03-24]. http://www.gov.cn/zhengce/202306/content_6888958.htm(in Chinese). [2] XIA C Y, YANG C R, XUE K, et al. A conflict risk analysis of MAV\UAV flight in shared airspace[J]. International Journal of Aerospace Engineering, 2021, 2021: 1692896. [3] 韩鹏, 赵嶷飞, 刘宏. 无人机地面撞击风险评估体系构建及趋势展望[J]. 中国民航大学学报, 2021, 39(1): 40-47. doi: 10.3969/j.issn.1674-5590.2021.01.008HAN P, ZHAO Y F, LIU H. Assessment system construction and trend foresight of UAV ground impact risk[J]. Journal of Civil Aviation University of China, 2021, 39(1): 40-47(in Chinese). doi: 10.3969/j.issn.1674-5590.2021.01.008 [4] MELNYK R, SCHRAGE D, VOLOVOI V, et al. A third-party casualty risk model for unmanned aircraft system operations[J]. Reliability Engineering & System Safety, 2014, 124: 105-116. [5] DENNEY E, PAI G, JOHNSON M. Towards a rigorous basis for specific operations risk assessment of UAS[C]//Proceedings of the IEEE/AIAA 37th Digital Avionics Systems Conference. Piscataway: IEEE Press, 2018: 1-10. [6] MARTINEZ C, SANCHEZ-CUEVAS P J, GERASIMOU S, et al. SORA methodology for multi-UAS airframe inspections in an airport[J]. Drones, 2021, 5(4): 141. doi: 10.3390/drones5040141 [7] WYSZYWACZ W. Easy risk assessment for unmanned aircraft systems: outline of the method[J]. Transactions on Aerospace Research, 2022, 22(3): 32-47. doi: 10.2478/tar-2022-0015 [8] HAN P, YANG X Y, ZHAO Y F, et al. Quantitative ground risk assessment for urban logistical unmanned aerial vehicle (UAV) based on Bayesian network[J]. Sustainability, 2022, 14(9): 5733. doi: 10.3390/su14095733 [9] 王文涛, 甘旭升, 吴亚荣, 等. 考虑不确定性的低空无人机运行风险评估方法[J]. 现代防御技术, 2022, 50(5): 14-21.WANG W T, GAN X S, WU Y R, et al. Low-altitude UAV operation risk assessment method considering the uncertainty[J]. Modern Defence Technology, 2022, 50(5): 14-21(in Chinese). [10] JIAO Q Y, LIU Y S, ZHENG Z G, et al. Ground risk assessment for unmanned aircraft systems based on dynamic model[J]. Drones, 2022, 6(11): 324. doi: 10.3390/drones6110324 [11] 韩鹏, 张冰玉. 航迹误差对无人机坠地伤人风险评估的影响[J]. 中国安全科学学报, 2021, 31(2): 106-111.HAN P, ZHANG B Y. Effect of track error on safety risk assessment of UAV ground impact[J]. China Safety Science Journal, 2021, 31(2): 106-111(in Chinese). [12] SHAO P C. Risk assessment for UAS logistic delivery under UAS traffic management environment[J]. Aerospace, 2020, 7(10): 140. doi: 10.3390/aerospace7100140 [13] LA COUR-HARBO A. Quantifying risk of ground impact fatalities for small unmanned aircraft[J]. Journal of Intelligent & Robotic Systems, 2019, 93(1): 367-384. [14] LA COUR-HARBO A. Ground impact probability distribution for small unmanned aircraft in ballistic descent[C]//Proceedings of the International Conference on Unmanned Aircraft Systems. Piscataway: IEEE Press, 2020: 1442-1451. [15] KIN H L.Framework for urban traffic management of unmanned aircraft system (u TM-UAS)[EB/OL]. (2017-09-22)[2024-03-28]. http://www.icao.int/Meetings/UAS2017/Documents/Kim%20Huat%2OLo_Singapore_UTM_%20Day%201.pdf. [16] PANG B Z, HU X T, DAI W, et al. UAV path optimization with an integrated cost assessment model considering third-party risks in metropolitan environments[J]. Reliability Engineering & System Safety, 2022, 222: 108399. [17] PRIMATESTA S, RIZZO A, LA COUR-HARBO A. Ground risk map for unmanned aircraft in urban environments[J]. Journal of Intelligent & Robotic Systems, 2020, 97: 489-509. [18] 胡莘婷, 戴福青. 基于城区行人安全的无人机运行风险评估[J]. 中国安全科学学报, 2020, 30(8): 137-142.HU X T, DAI F Q. Risk assessment model for UAV operation considering safety of ground pedestrians in urban areas[J]. China Safety Science Journal, 2020, 30(8): 137-142(in Chinese). [19] HU X T, PANG B Z, DAI F Q, et al. Risk assessment model for UAV cost-effective path planning in urban environments[J]. IEEE Access, 2020, 8: 150162-150173. [20] 曲欣宇, 叶博嘉, 王华中, 等. 基于风险地图的城市物流无人机路径规划研究[J]. 航空计算技术, 2024, 54(1): 87-91.QU X Y, YE B J, WANG H Z, et al. Research on global path planning method for urban logistics UAV based on risk maps[J]. Aeronautical Computing Technique, 2024, 54(1): 87-91(in Chinese). [21] LI Q Y, WU Q G, TU H Y, et al. Ground risk assessment for unmanned aircraft focusing on multiple risk sources in urban environments[J]. Processes, 2023, 11(2): 542. doi: 10.3390/pr11020542 [22] LIU Y, ZHANG X J, WANG Z, et al. Ground risk assessment of UAV operations based on horizontal distance estimation under uncertain conditions[J]. Mathematical Problems in Engineering, 2021, 2021: 3384870. [23] 中国民用航空局航空器适航审定司. 城市场景轻小型无人驾驶航空器物流航线划设规范[EB/OL]. (2022-07-29)[2024-03-28]. http://www.caac.gov.cn/big5/www.caac.gov.cn/XXGK/XXGK/BZGF/HYBZ/202208/P020220811600885528858.pdf.Aircraft Airworthiness Certification Department, Civil Ariation Administration of China. Route design specification of the light-small unmanned aircraft system for urban logistics[EB/OL]. (2022-07-29)[2024-03-28]. http://www.caac.gov.cn/big5/www.caac.gov.cn/XXGK/XXGK/BZGF/HYBZ/202208/P020220811600885528858.pdf(in Chinese). [24] 朱元军, 李妍, 高子昂. 可接受风险水平下城市空域无人机路径规划方法研究综述[J]. 西华大学学报 (自然科学版), 2022, 41(1): 7-12.ZHU Y J, LI Y, GAO Z A. A review of UAS route planning in urban airspace with acceptable risk levels[J]. Journal of Xihua University (Natural Science Edition), 2022, 41(1): 7-12(in Chinese). [25] Joint Authorities for Rulemaking of Unmanned Systems. JARUS guidelines on specific operations risk assessment (SORA) V2.0[EB/OL]. (2019-01-30)[2024-03-28]. http://jarus-rpas.org/wp-content/uploads/2024/06/SORA-v2.5-Main-Body-Release-JAR_doc_25.pdf. [26] 中国民用航空局航空器适航审定司. 民用无人驾驶航空器系统适航审定分级分类和系统安全性分析指南[EB/OL]. (2022-11-21)[2024-03-28]. http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/202302/P020230213505366854054.pdf.Aircraft Airworthiness Certification Department, Civil Ariation Administration of China. Guidelines for civil unmanned aerial vehicle system airworthiness validation classification and system safety analysis [EB/OL]. (2022-11-21)[2024-03-28]. http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/202302/P020230213505366854054.pdf.(in Chinese). -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 1101
- HTML全文浏览量: 252
- PDF下载量: 133
- 被引次数: 0
