



Optimization method of transition trajectory for tail-sitter unmanned aerial vehicles
-
摘要:
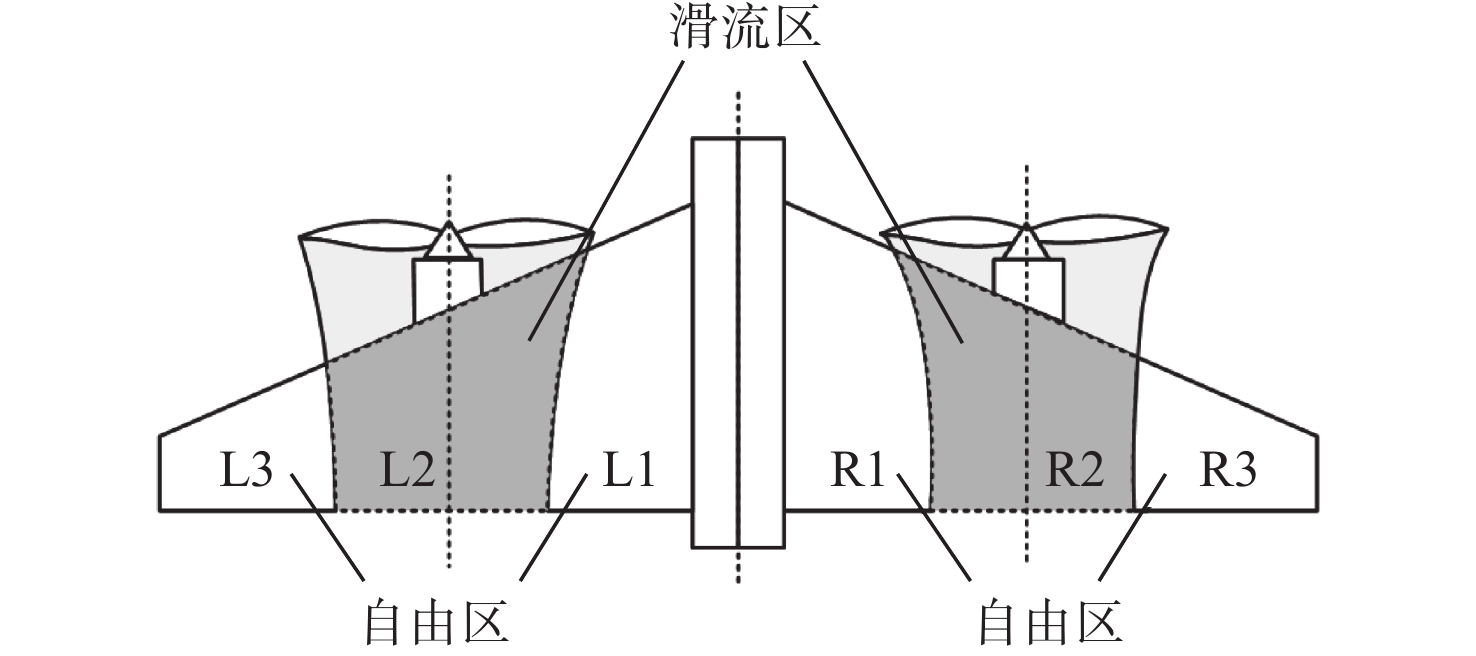
针对目前基于传统最优化方法得到的过渡轨迹在尾座式垂直起降无人机实际飞行过程中可行性低和鲁棒性差的问题,提出一种基于过渡走廊的过渡轨迹优化方法。以一种双发尾座式垂直起降无人机为研究对象,通过分析机翼不同区域之间的迎角差异,构建非线性动力学模型。基于倾转旋翼飞行器过渡走廊研究思路,设计一种针对尾座式垂直起降无人机的过渡走廊,并通过限制爬升速率和俯仰角速率来提高过渡走廊的可行性。通过分析模型误差对过渡走廊的影响,得到一条具有最大安全裕度的目标过渡轨迹。将过渡过程视为轨迹优化问题,求解得到最接近目标过渡轨迹且保留足够作动器裕度的最优过渡轨迹。仿真和实际飞行结果表明,所提方法能够引导飞机快速安全地完成过渡,避免出现高度增加过大、过渡时间过长及作动器饱和等不利情况。
-
关键词:
- 尾座式垂直起降无人机 /
- 动力学模型 /
- 最优化方法 /
- 过渡走廊 /
- 过渡轨迹
Abstract:Most transition trajectories obtained by traditional optimization methods are not feasible in the actual flight process. Moreover, the robustness of these transition trajectories is poor due to not considering the retention of sufficient actuator margin. In order to solve this problem, a transition corridor-based transition method for tail-sitter unmanned aerial vehicle (UAV) is proposed. Considering a type of dual-rotor tail-sitter UAV, a nonlinear dynamic model is constructed by distinguishing the aerodynamic characteristics of the wing in the propeller airflow region from those outside the region. Inspired by the research on transition corridors for tilt-rotor aircraft, a transition corridor is designed. The feasibility of the transition corridor is improved by limiting the range of climb rate and pitch angle rate. A trajectory located inside the transition corridor with the maximum safety margin is chosen as the target transition trajectory by the optimization method. Then, the transition process of the tail-sitter UAV is regarded as a trajectory optimization problem. By solving the trajectory optimization problem, the optimal transition trajectory which is closest to the target transition trajectory and retains sufficient actuator margin is obtained. Finally, based on the designed transition control framework, hardware-in-the-loop simulation experiments and real flight tests are conducted. Simulation results are consistent with the real flight results, which prove that the designed transition method can guide the aircraft to complete the transition quickly and safely while retaining a certain actuator margin, avoiding such unfavorable conditions for the transition flight as excessive altitude increase, long transition time and actuator saturation.
-
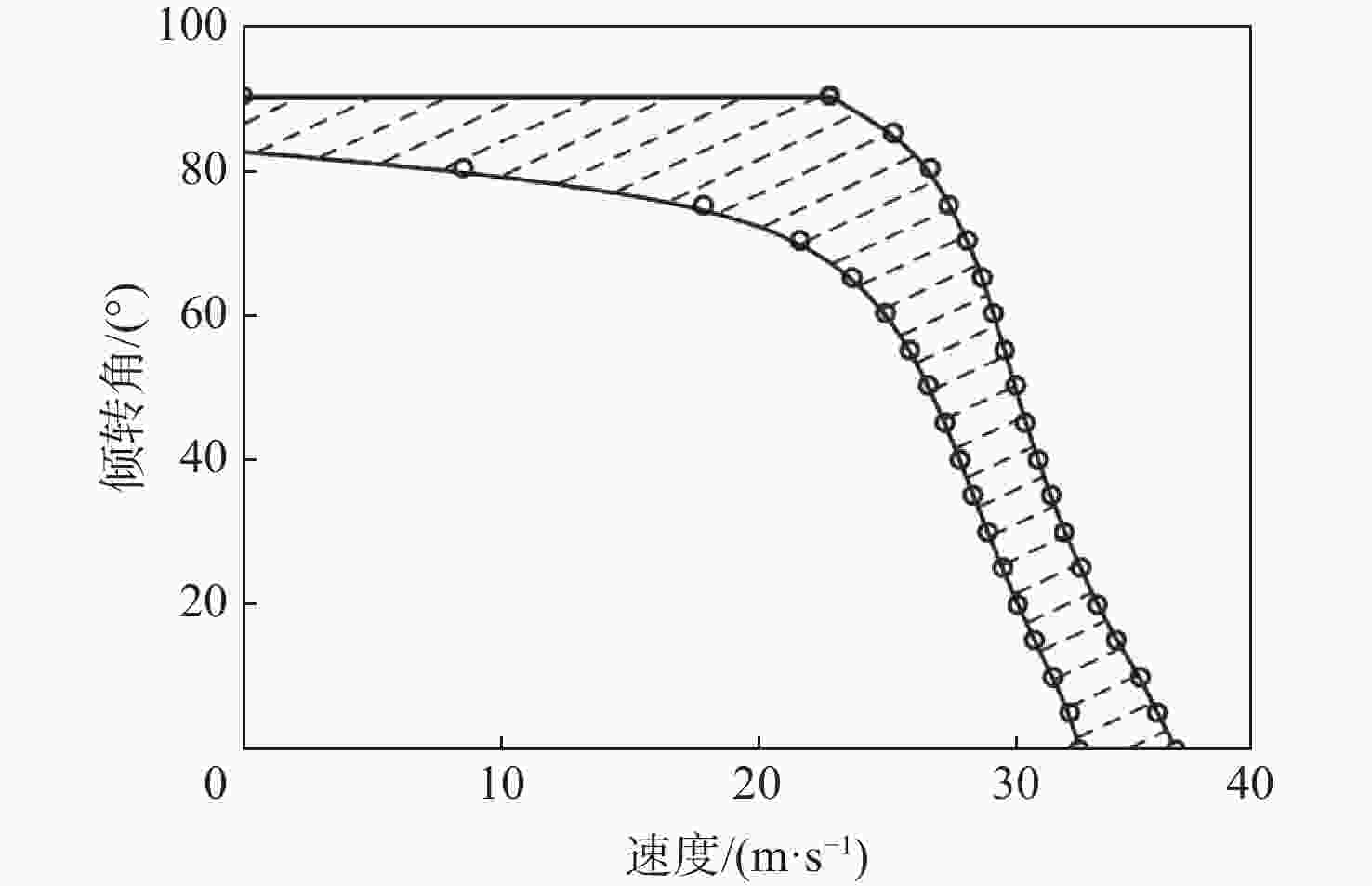
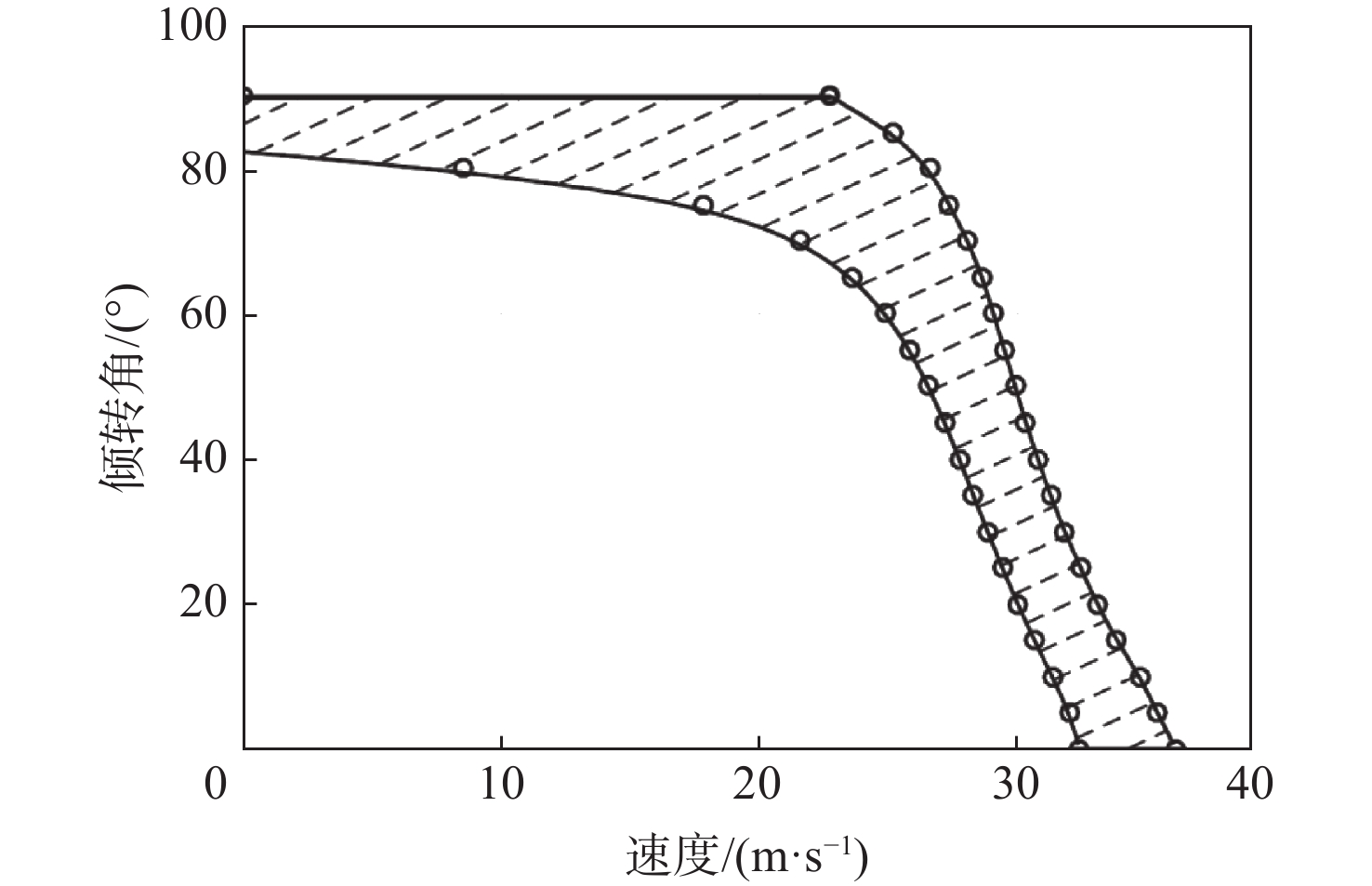
图 6 传统倾转旋翼机过渡走廊示意图
Figure 6. Schematic diagram of the transition corridor for a conventional tiltrotor
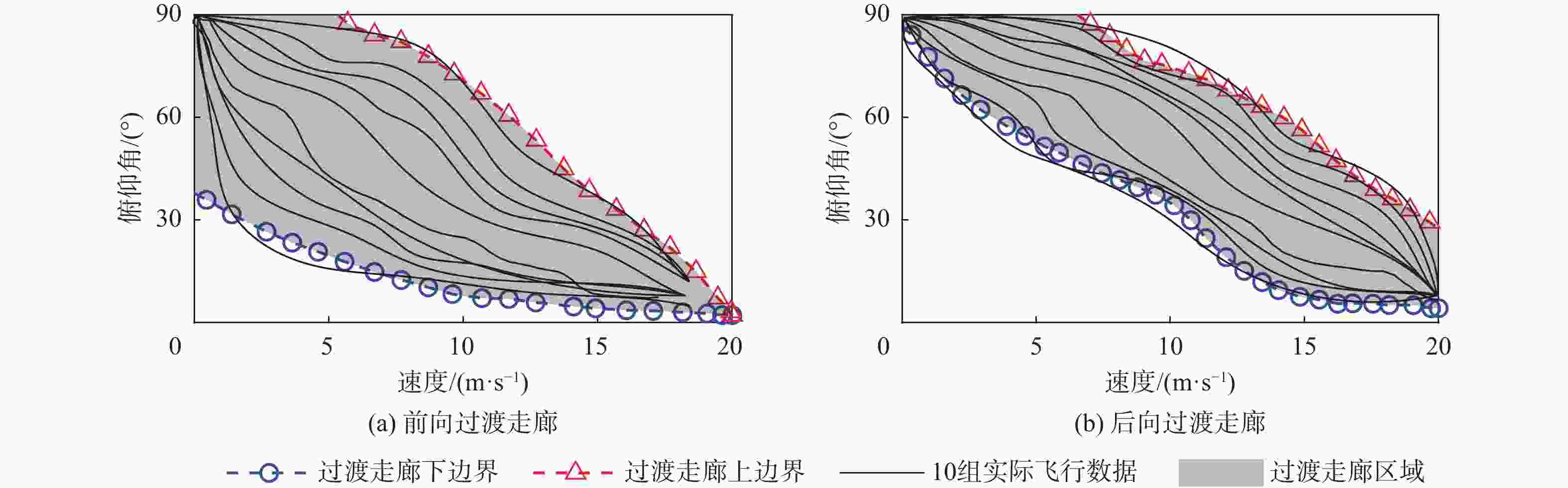
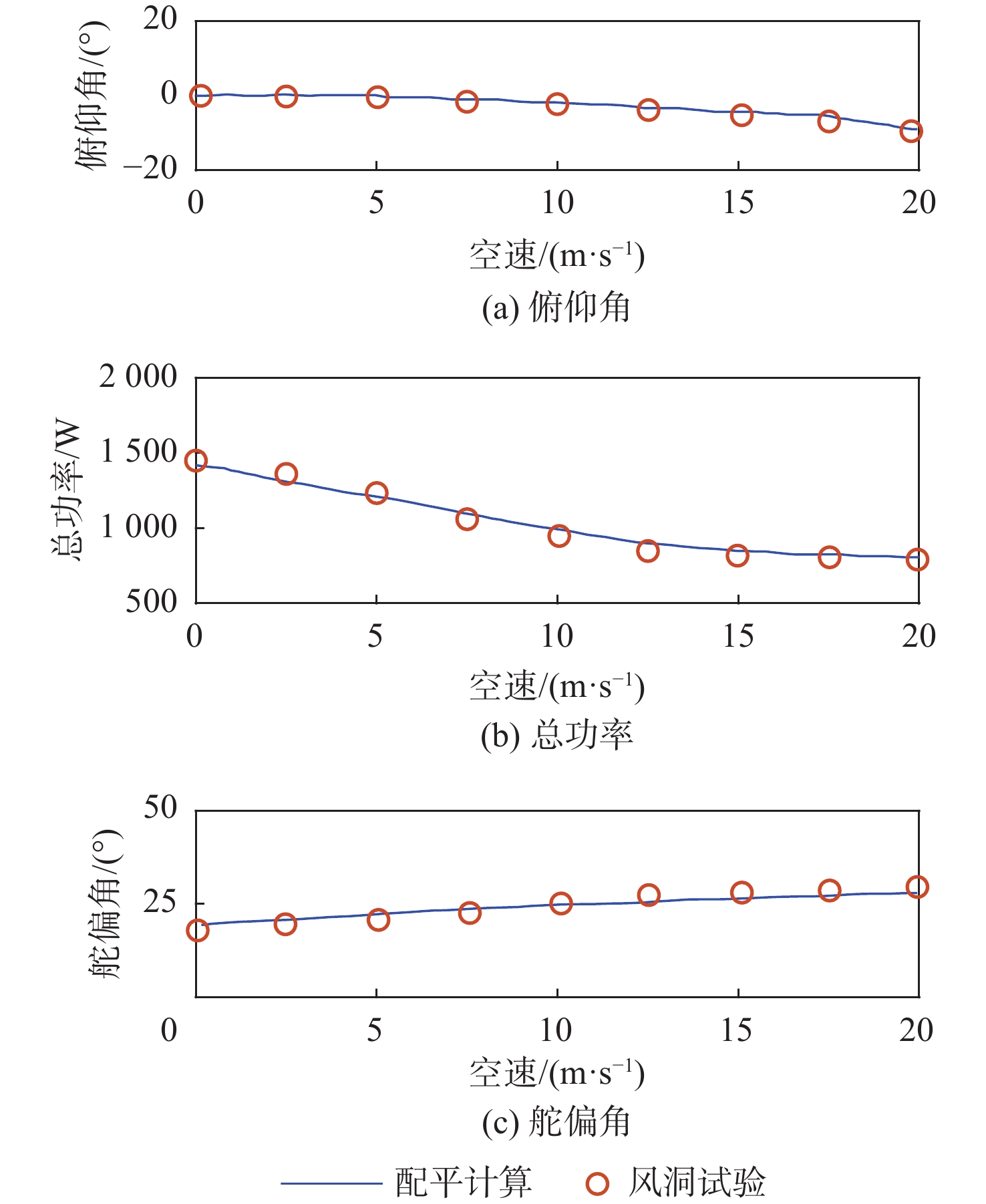
图 8 尾座式垂直起降无人机过渡走廊计算结果与实际飞行数据对比
Figure 8. Comparison of the calculation results of the tail-sitter vertical take-off and landing UAV transition corridor with the actual flight data
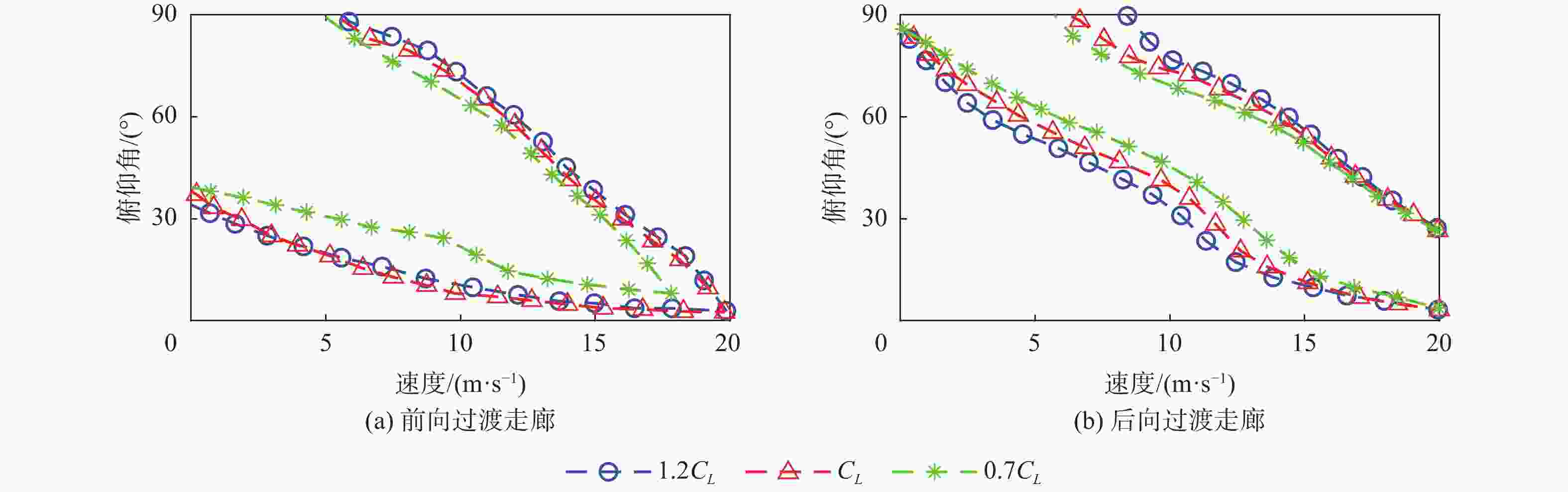
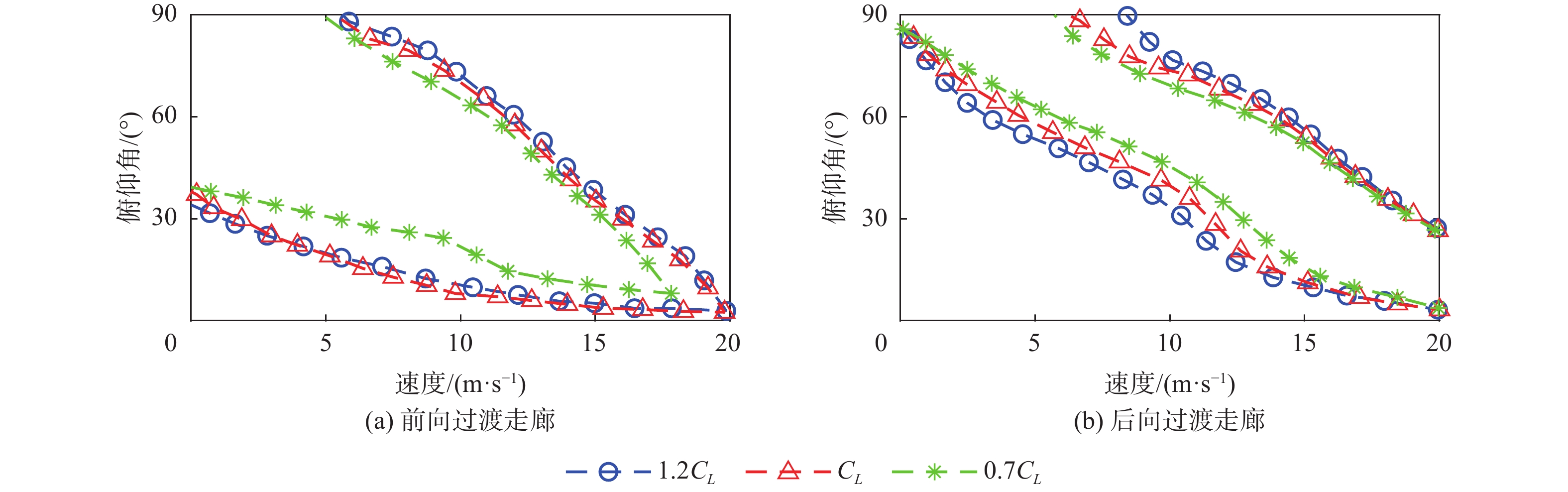
图 9 升力系数对前后向过渡走廊的影响
Figure 9. Effect of lift coefficient on the front and back transition corridors
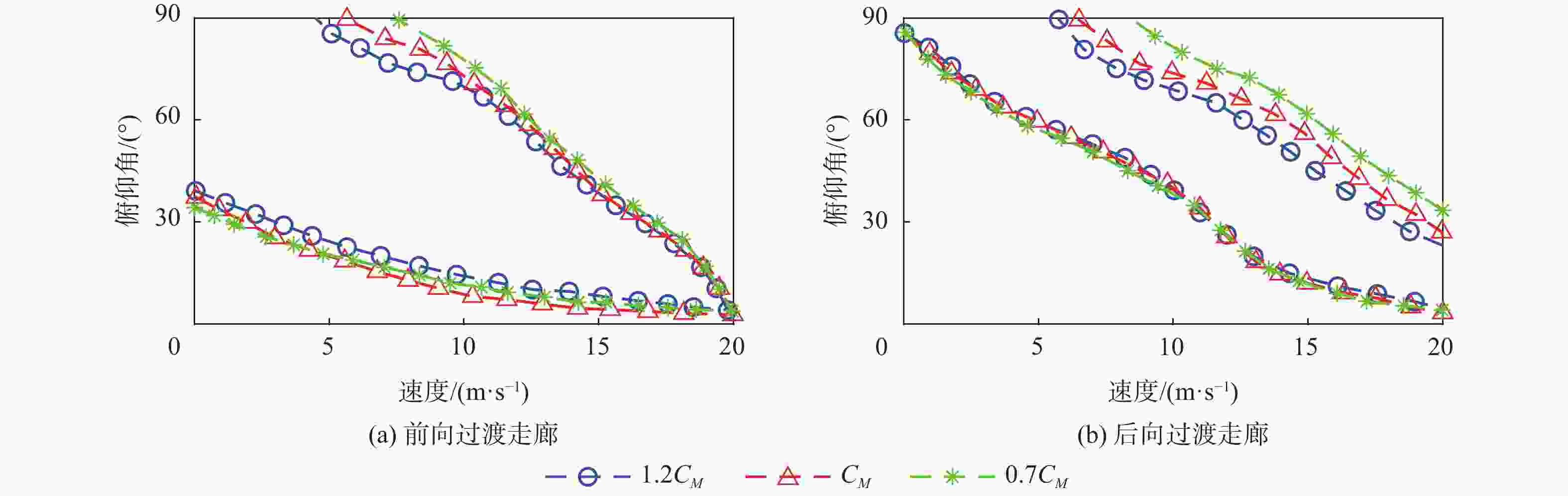
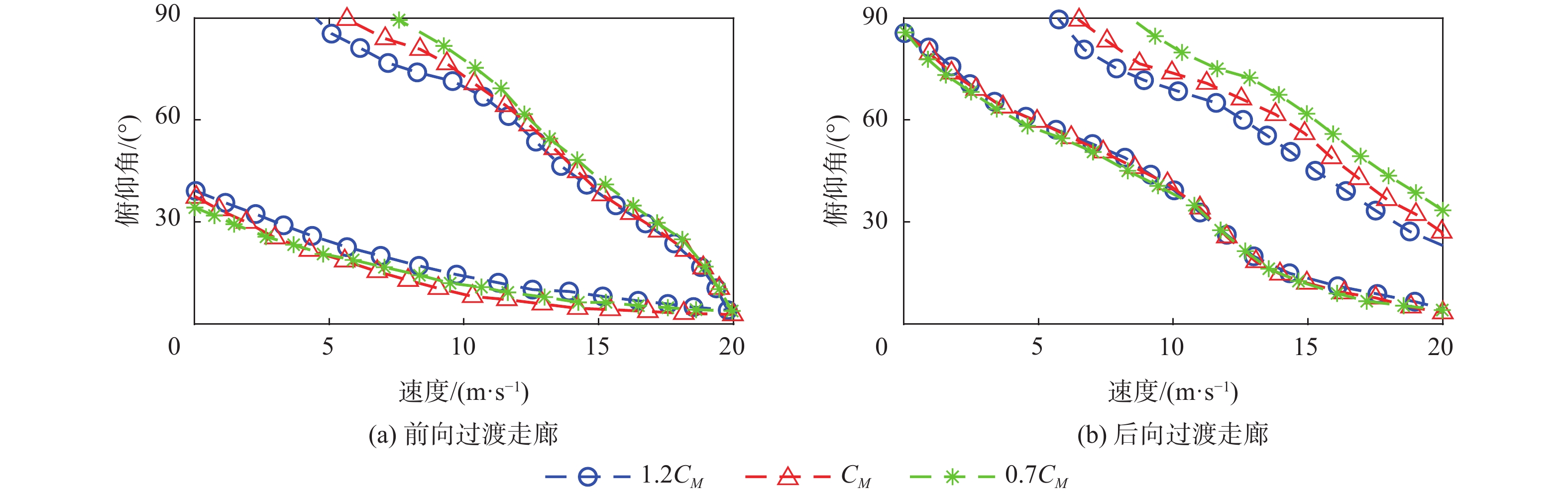
图 10 俯仰力矩系数对前后向过渡走廊的影响
Figure 10. Effect of pitching moment coefficient on the front and back transition corridors
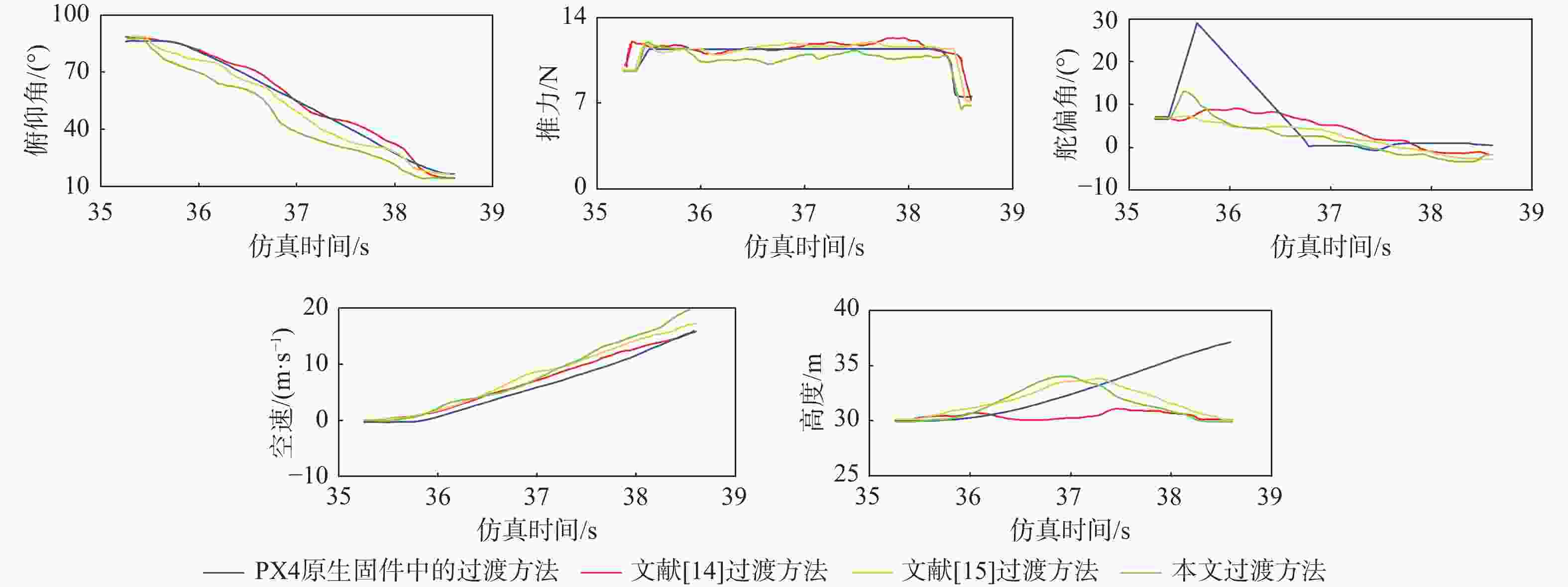
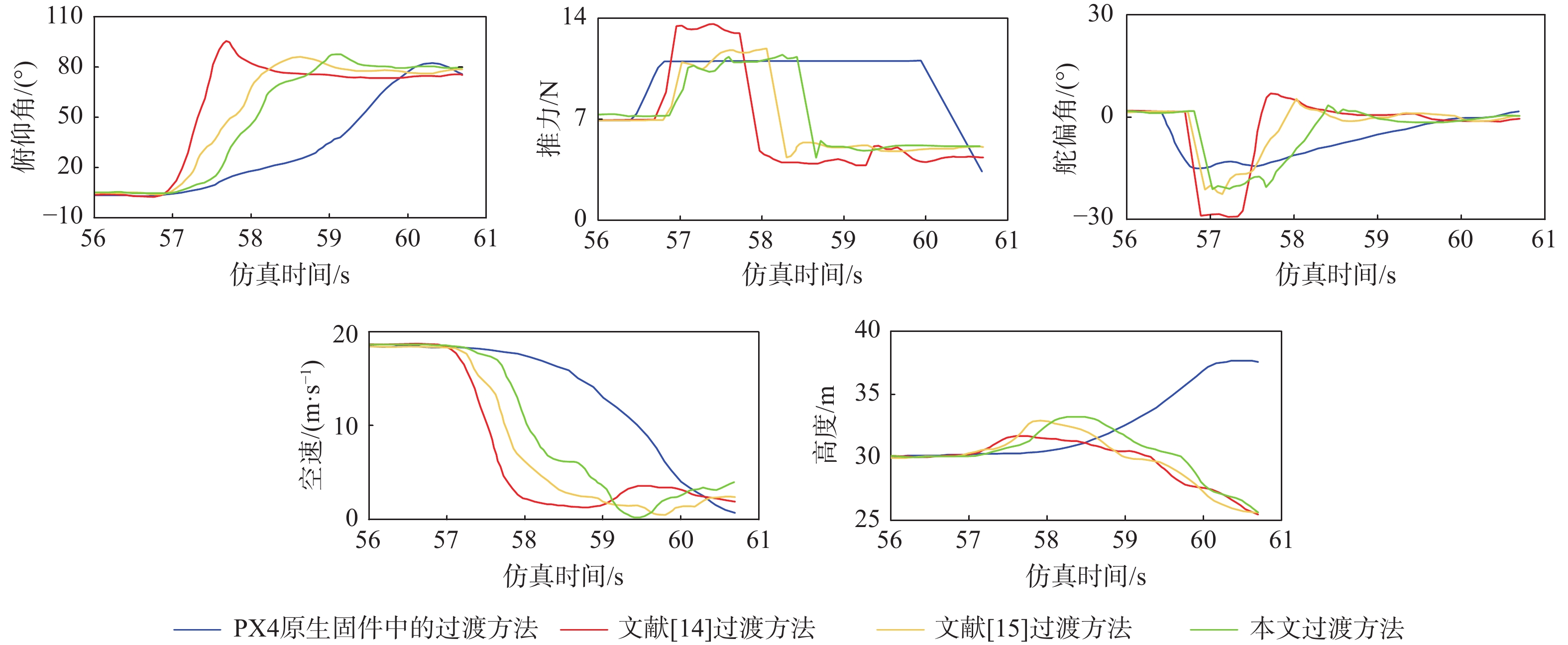
图 13 4种过渡方法在前向过渡硬件在环仿真时的表现
Figure 13. Performance of four different transition methods during front transition simulation
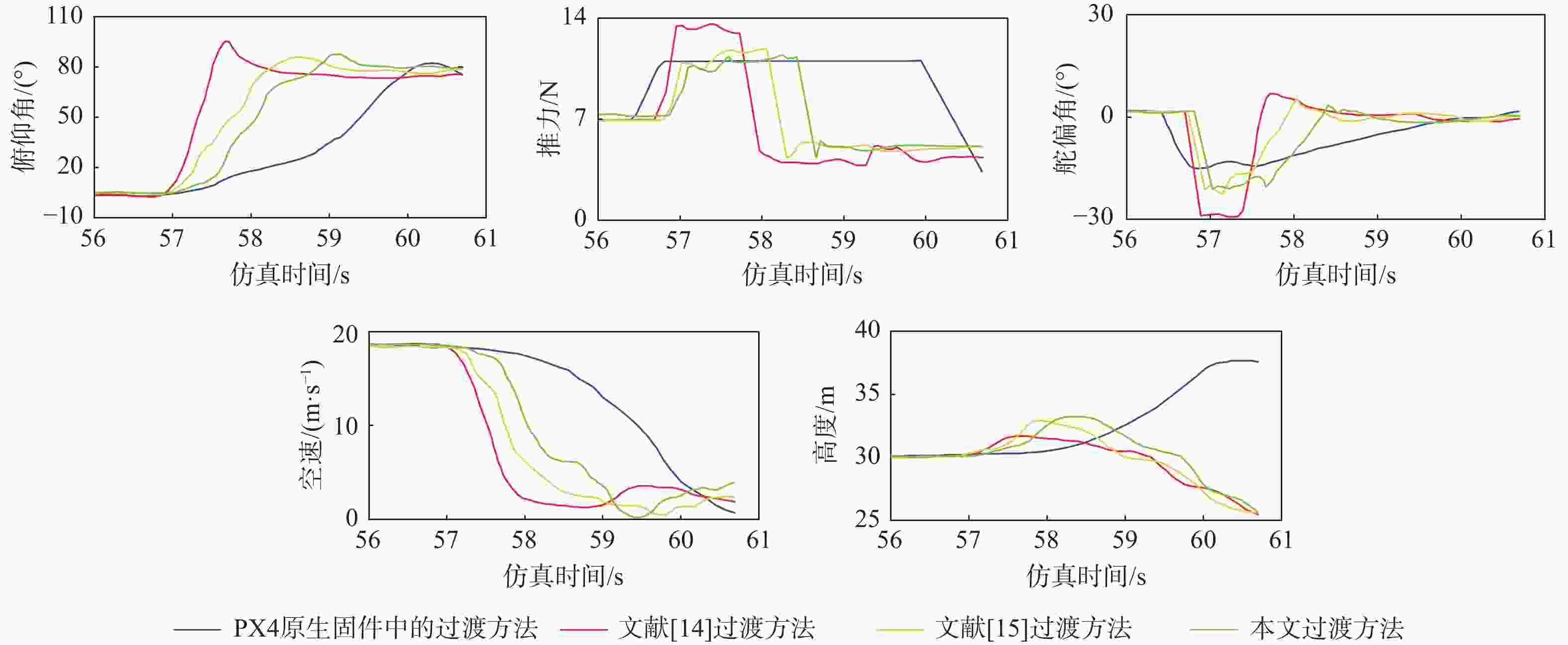
图 14 4种过渡方法在后向过渡硬件在环仿真时的表现
Figure 14. Performance of four different transition methods during back transition simulation
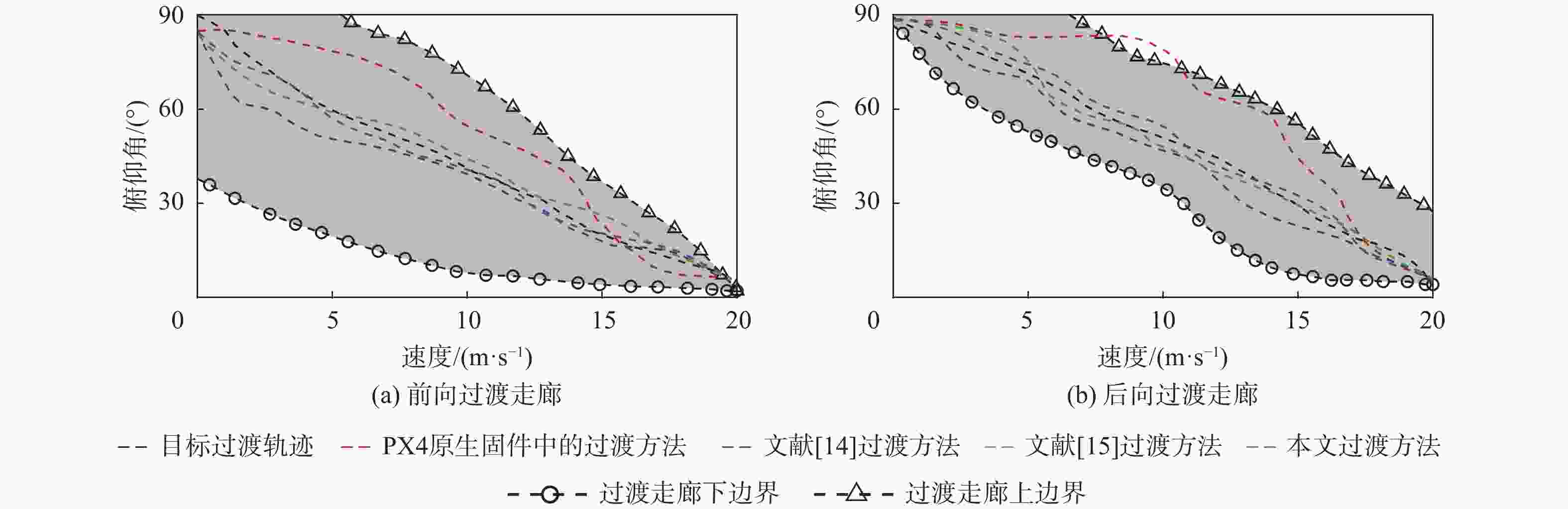
图 15 4种过渡方法的过渡轨迹在过渡走廊中的位置
Figure 15. Trajectories for four transition methods shown in the transition corridors

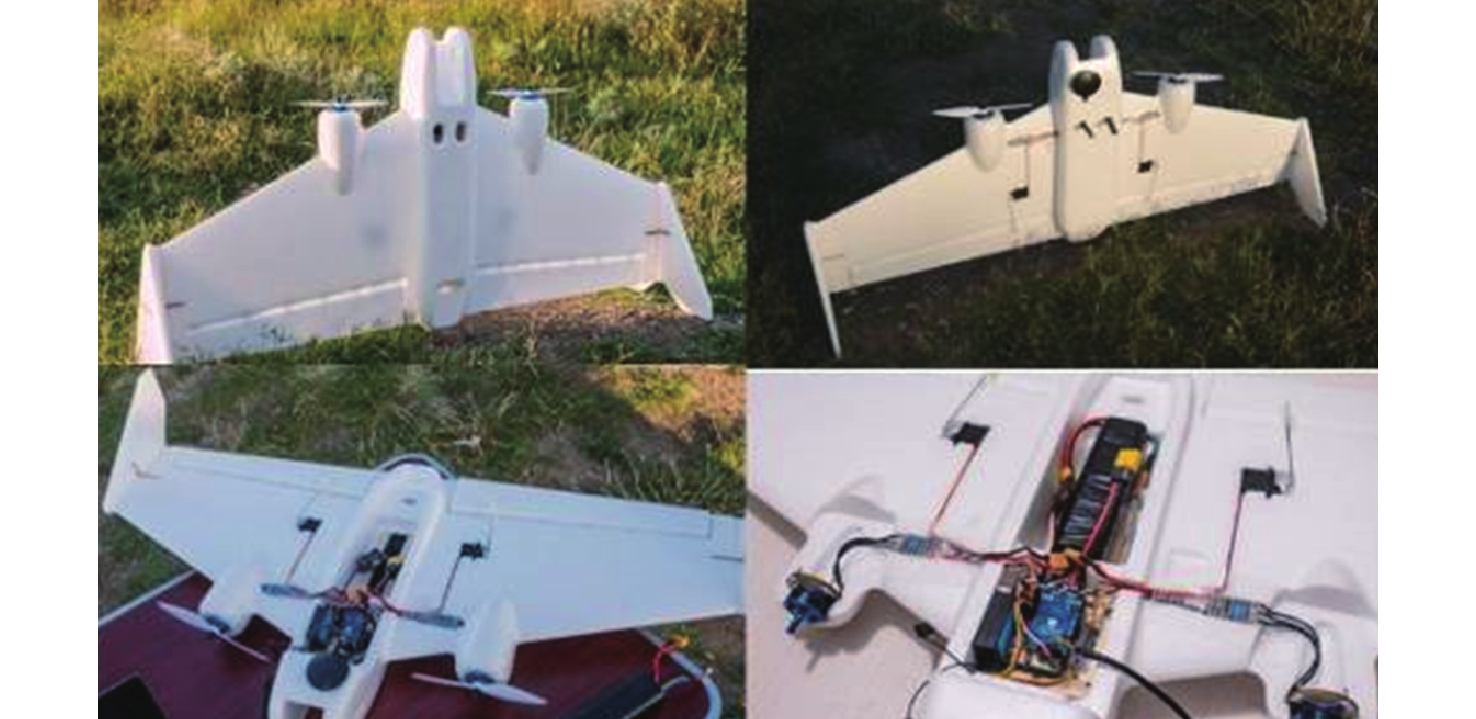
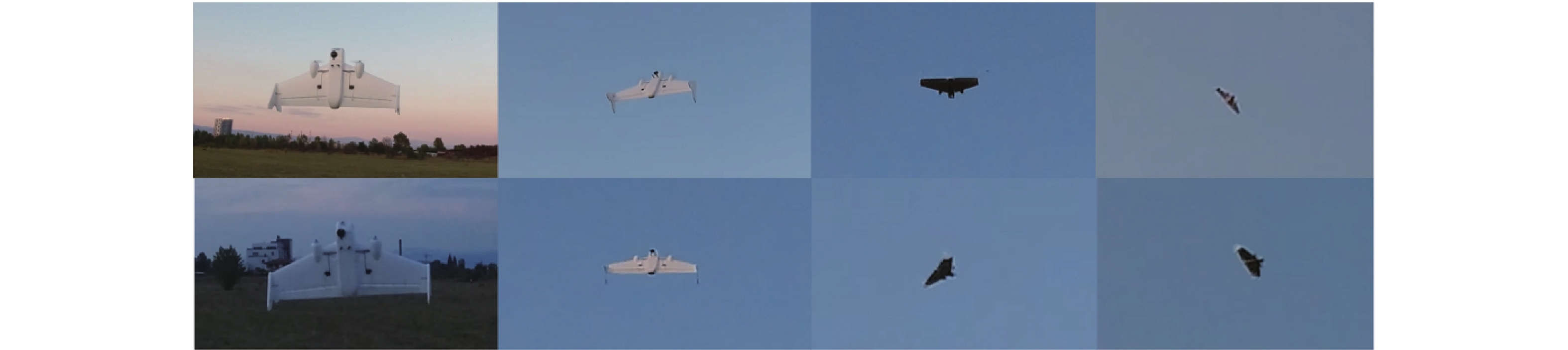
图 16 试飞中的尾座式垂直起降无人机
Figure 16. Photographs of the test tail-sitter vertical take-off and landing UAV in flight tests
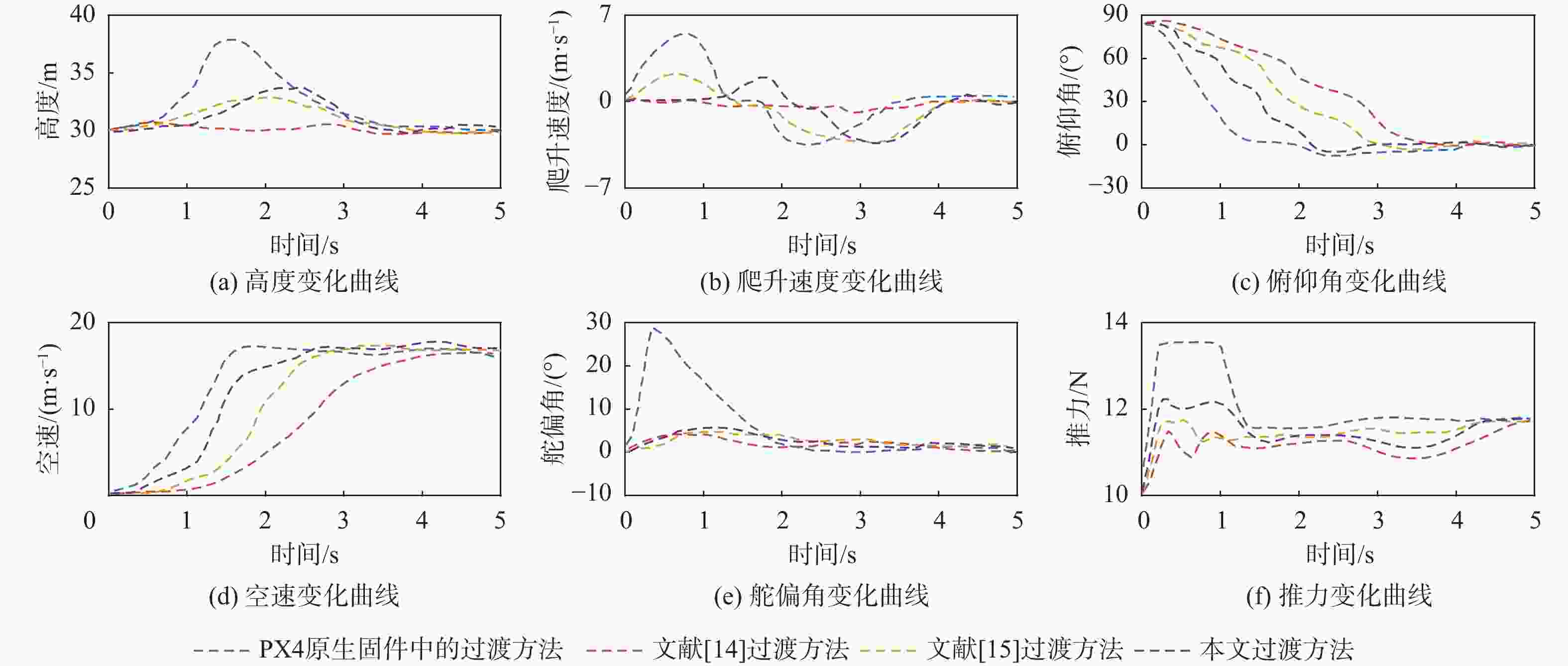
图 17 4种过渡方法在前向过渡时的表现
Figure 17. Performance of four different transition methods during front transition
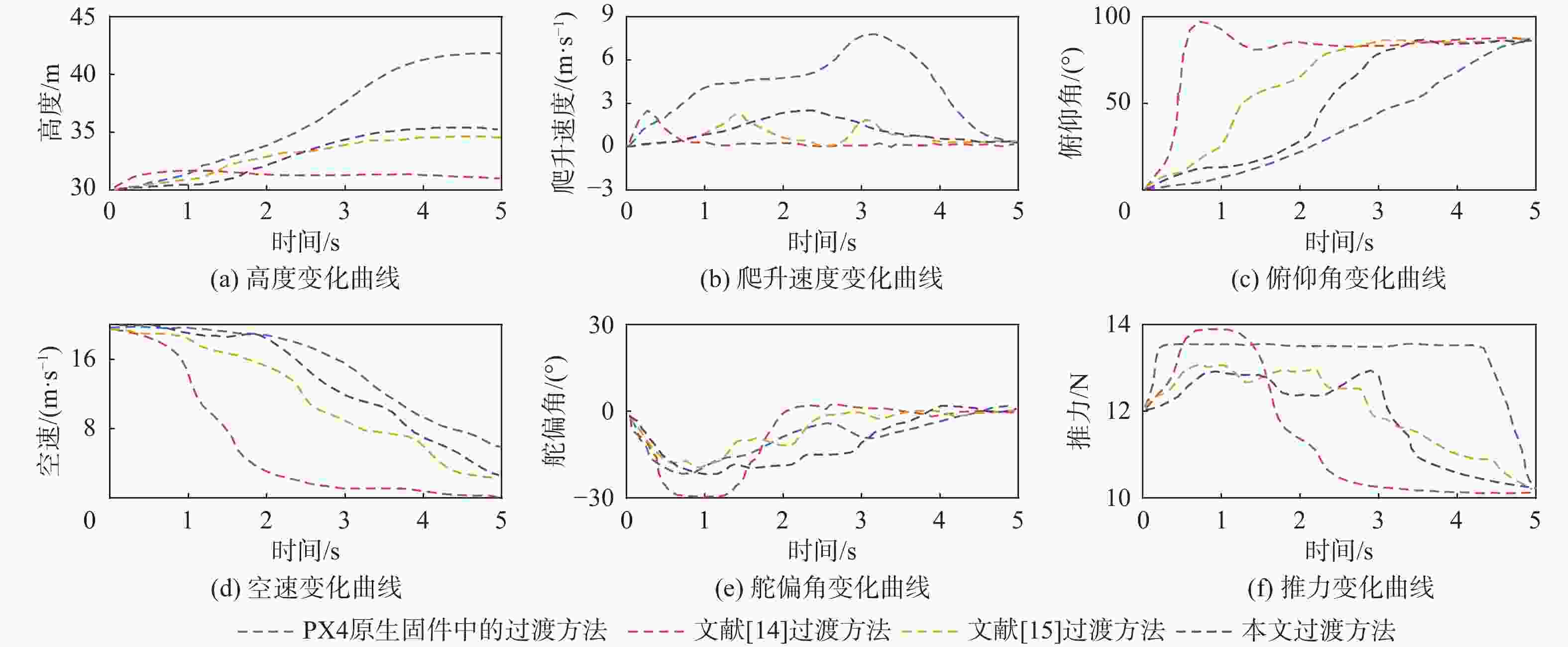
图 18 4种过渡方法在后向过渡时的表现
Figure 18. Performance of four different transition methods during back transition
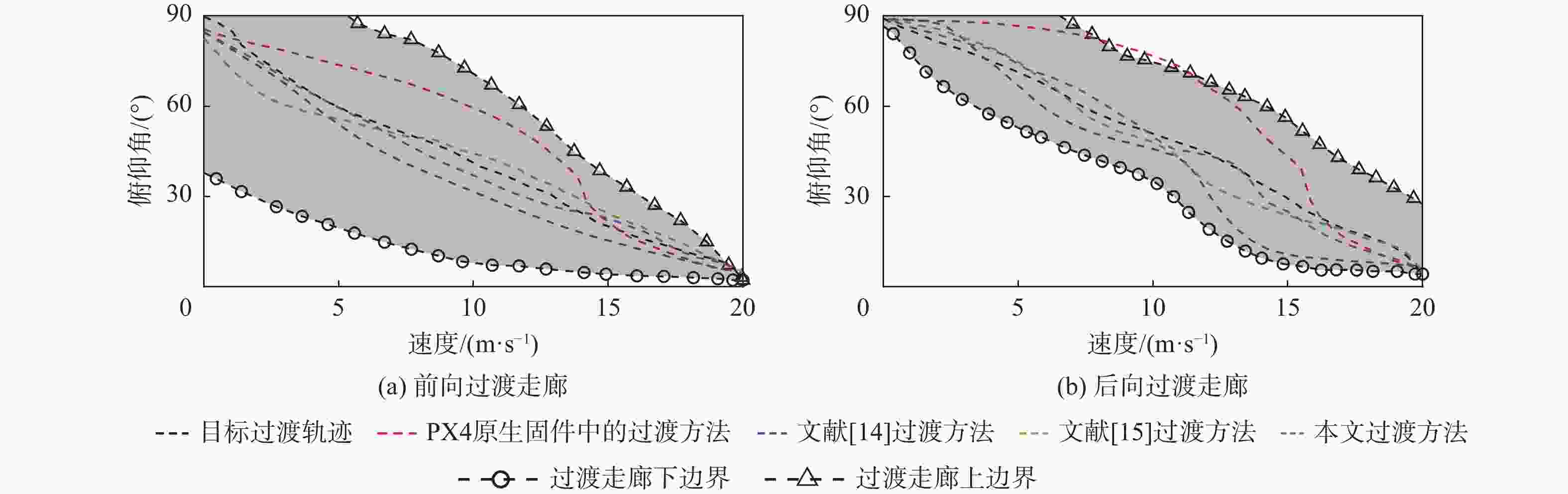
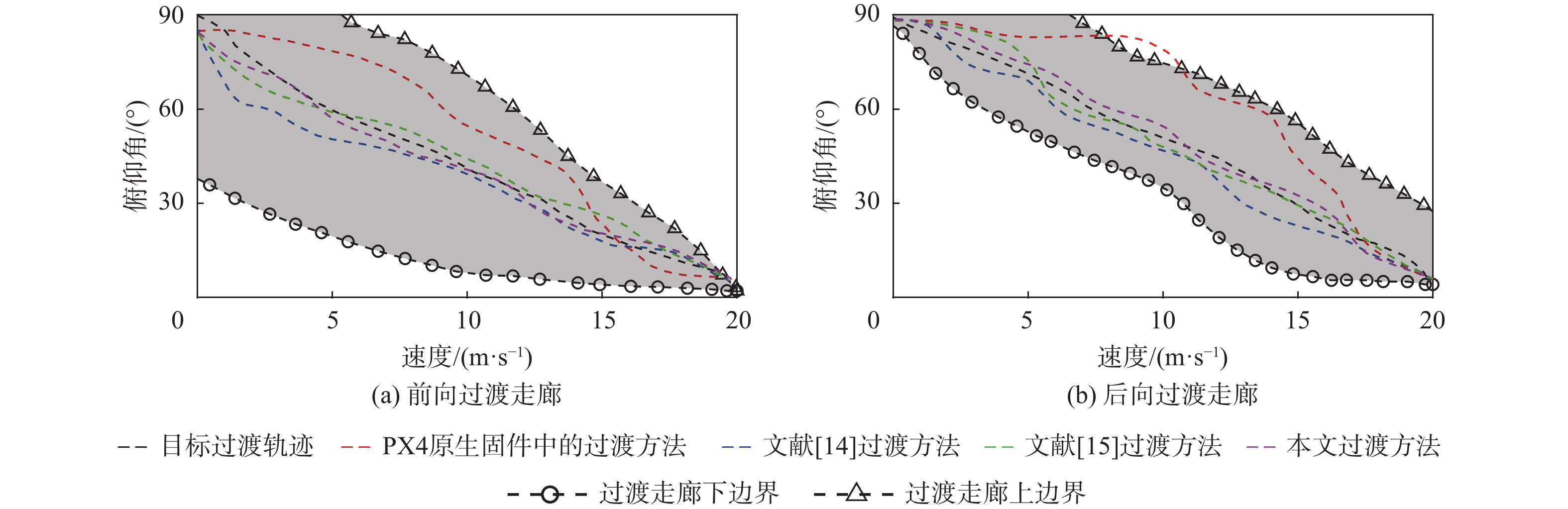
图 19 4 种过渡方法的实际过渡轨迹在过渡走廊中的位置
Figure 19. Practical trajectories for four different transition methods shown in the transition corridor
表 1 Arkward尾座式飞机参数
Table 1. Parameters of Arkward tail-sitter vehicle
物理参数 数值 起飞质量/kg 0.93 翼展/m 0.89 机翼表面积/m2 0.13 螺旋桨桨盘半径/m 0.16 平均气动弦长/m 0.14 单个升降舵面积/m2 0.05 单个螺旋桨最大推力/N 6.90 升降舵最大偏转角度/(°) 30 螺旋桨最大推力变化速率/(N·s−1) 20 升降舵最大偏转速率/((°)·s−1) 110  下载: 导出CSV
下载: 导出CSV
表 2 轨迹优化问题的约束条件
Table 2. Constraints of trajectory optimization problems
约束对象 约束范围 螺旋桨转速ω/(r·min−1) [0, ωmax] 舵偏角δe/(°) [−δe,max, δe,max] 过渡开始时间t0/s [0, 0] 过渡结束时间tn/s [5, 5] 水平速度$ \dot{X}^{\mathrm{I}}(t)$/(m·s−1) [0, 20] 垂直速度$ \dot{Z}^{\mathrm{I}}(t)$/(m·s−1) [−1, 1]
下载: 导出CSV
表 3 4种过渡方法的过渡指标对比
Table 3. Comparison of transition indicators for four transition methods
过渡阶段 过渡方法
${t_{{\text{trans}}}}/{\text{s}}$
$\Delta {h_{\max }}/{{\mathrm{m}}} $
${T_{\max }}/\% $
${\delta _{\max }}/\% $硬件在环仿真 实际飞行 硬件在环仿真 实际飞行 硬件在环仿真 实际飞行 硬件在环仿真 实际飞行 前向过渡 PX4原生固件中的过渡方法 2.15 1.80 7.60 7.21 85.7 96.4 99.8 93.4 文献[14]过渡方法 3.31 3.31 1.63 1.33 80.2 82.1 29.1 13.6 文献[15]过渡方法 3.09 2.46 3.87 3.38 82.6 84.2 32.6 14.5 本文过渡方法 2.88 3.18 3.93 4.09 83.9 87.1 46.7 15.0 后向过渡 PX4原生固件中的过渡方法 3.51 5.08 7.51 13.80 78.3 97.1 48.9 66.7 文献[14]过渡方法 0.80 1.32 2.13 2.19 99.6 99.8 99.8 99.7 文献[15]过渡方法 1.29 2.57 2.69 4.04 84.5 92.8 87.1 60.3 本文过渡方法 1.81 2.96 2.71 5.01 82.1 91.1 83.6 65.9
下载: 导出CSV
-
[1] 刘志豪, 闵荣, 方成, 等. 多飞行模式垂直起降无人机过渡飞行控制策略[J]. 上海交通大学学报, 2019, 53(10): 1173-1181.LIU Z H, MIN R, FANG C, et al. Transition flight control strategy of multiple flight mode vertical take-off and landing unmanned aerial vehicle[J]. Journal of Shanghai Jiao Tong University, 2019, 53(10): 1173-1181(in Chinese). [2] 王子安, 龚正, 陈永亮, 等. 混合动力复合翼应急迫降在线航迹规划与制导[J]. 航空学报, 2019, 40(10): 323105.WANG Z A, GONG Z, CHEN Y L, et al. Online path planning and guidance for hybrid VTOL UAVs forced landing[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(10): 323105(in Chinese). [3] TAYYAB M, XIA Y Q, ZHAI D H, et al. Trajectory tracking control of a VTOL unmanned aerial vehicle using offset-free tracking MPC[J]. Chinese Journal of Aeronautics, 2020, 33(7): 2024-2042. doi: 10.1016/j.cja.2020.03.003 [4] 张飞, 王云, 谭锟. 复合式垂直起降固定翼无人机旋翼和机翼的干扰分析[J]. 航空工程进展, 2019, 10(6): 810-816.ZHANG F, WANG Y, TAN K. Interference analysis of rotor and wing of compound vertical takeoff and landing fixed wing UAV[J]. Advances in Aeronautical Science and Engineering, 2019, 10(6): 810-816(in Chinese). [5] 刘泽宇, 招启军, 张夏阳, 等. 倾转机翼无人倾转旋翼机飞行动力学稳定性分析[J]. 飞行力学, 2021, 39(3): 1-7.LIU Z Y, ZHAO Q J, ZHANG X Y, et al. Analysis of flight dynamics stability of unmanned tilt-rotor aircraft with tilting wings[J]. Flight Dynamics, 2021, 39(3): 1-7(in Chinese). [6] 刘德元, 刘昊, LEWIS F L. 尾座式无人飞行器鲁棒容错编队控制[J]. 航空学报, 2021, 42(2): 324296.LIU D Y, LIU H, LEWIS F L. Robust fault-tolerant formation control for tail-sitters[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(2): 324296(in Chinese). [7] KUBO D, SUZUKI S. Robust optimal autopilot design for a tail-sitter unmanned aerial vehicle[J]. Journal of Aerospace Computing, Information, and Communication, 2008, 5(5): 135-154. doi: 10.2514/1.33514 [8] LIU D Y, LIU H, LI Z Y, et al. Robust attitude control for tail-sitter unmanned aerial vehicles in flight mode transitions[J]. International Journal of Robust and Nonlinear Control, 2019, 29(4): 1132-1149. doi: 10.1002/rnc.4428 [9] BENREZKI R R, TAYEBI A, TADJINE M. Adaptive trajectory tracking control for VTOL-UAVs with unknown inertia, gyro-bias, and actuator LOE[J]. International Journal of Robust and Nonlinear Control, 2018, 28(17): 5247-5261. doi: 10.1002/rnc.4308 [10] JOHNSON E N, WU A, NEIDHOEFER J C, et al. Flight-test results of autonomous airplane transitions between steady-level and hovering flight[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(2): 358-370. doi: 10.2514/1.29261 [11] ITASSE M, MOSCHETTA J M, AMEHO Y, et al. Equilibrium transition study for a hybrid MAV[J]. International Journal of Micro Air Vehicles, 2011, 3(4): 229-245. doi: 10.1260/1756-8293.3.4.229 [12] ÇAKICI F, LEBLEBICIOĞLU M K. Design and analysis of a mode-switching micro unmanned aerial vehicle[J]. International Journal of Micro Air Vehicles, 2016, 8(4): 221-229. doi: 10.1177/1756829316678876 [13] SAGHAFI F, BANAZADEH A. Investigation on the flight characteristics of a conceptual fluidic thrust-vectored aerial tail-sitter[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2007, 221(5): 741-755. doi: 10.1243/09544100JAERO206 [14] YANG Y J, ZHU J H, WANG X Y, et al. Dynamic transition corridors and control strategy of a rotor-blown-wing tail-sitter[J]. Journal of Guidance, Control, and Dynamics, 2021, 44(10): 1836-1852. doi: 10.2514/1.G005464 [15] LI B Y, SUN J X, ZHOU W F, et al. Transition optimization for a VTOL tail-sitter UAV[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(5): 2534-2545. doi: 10.1109/TMECH.2020.2983255 [16] SUN J X, LI B Y, WEN C Y, et al. Design and implementation of a real-time hardware-in-the-loop testing platform for a dual-rotor tail-sitter unmanned aerial vehicle[J]. Mechatronics, 2018, 56: 1-15. doi: 10.1016/j.mechatronics.2018.10.001 [17] 夏济宇, 周洲, 王正平, 等. 倾转动力无人机三维过渡走廊[J]. 北京亚洲成人在线一二三四五六区学报, 2024, 50(3): 886-895.XIA J Y, ZHOU Z, WANG Z P, et al. The research on three-dimensional transition corridor of tilt-propulsion UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(3): 886-895(in Chinese). [18] 曹芸芸. 倾转旋翼飞行器飞行动力学数学建模方法研究[D]. 南京: 南京亚洲成人在线一二三四五六区, 2012.CAO Y Y. Study on mathematical modeling method of flight dynamics of tilt-rotor aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012(in Chinese). [19] 俞志明, 陈仁良, 孔卫红. 倾转四旋翼飞行器倾转过渡走廊分析方法[J]. 北京亚洲成人在线一二三四五六区学报, 2020, 46(11): 2106-2113.YU Z M, CHEN R L, KONG W H. Analysis method for conversion corridor of quad tilt rotor aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(11): 2106-2113(in Chinese). [20] 樊有容, 王皓, 杨乐, 等. 基于过渡走廊的倾转旋翼无人机纵向控制研究[J]. 飞行力学, 2022, 40(2): 61-66.FAN Y R, WANG H, YANG L, et al. Research on longitudinal control of tilt-rotor UAV based on transition corridor[J]. Flight Dynamics, 2022, 40(2): 61-66(in Chinese). [21] KANG Y, PARK B, YOO C, et al. Flight test results of automatic tilt control for small scaled tilt rotor aircraft[C]//Proceedings of the International Conference on Control, Automation and Systems. Piscataway: IEEE Press, 2008: 47-51. [22] MURAOKA K, OKADA N, KUBO D, et al. Transition flight of quad tilt wing VTOL UAV[C]//Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences. Bonn: ICAS, 2012, 4: 3242-3251. [23] 严旭飞, 陈仁良. 倾转旋翼机动态倾转过渡过程的操纵策略优化[J]. 航空学报, 2017, 38(7): 520865. doi: 10.7527/S1000-6893.2017.520865YAN X F, CHEN R L. Control strategy optimization of dynamic conversion procedure of tilt-rotor aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(7): 520865(in Chinese). doi: 10.7527/S1000-6893.2017.520865 [24] KIM C J, SUNG S, PARK S H, et al. Numerical time-scale separation for rotorcraft nonlinear optimal control analyses[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(2): 658-673. doi: 10.2514/1.59557 [25] KELLY M. An introduction to trajectory optimization: how to do your own direct collocation[J]. SIAM Review, 2017, 59(4): 849-904. doi: 10.1137/16M1062569 [26] BANAZADEH A, TAYMOURTASH N. Optimal control of an aerial tail sitter in transition flight phases[J]. Journal of Aircraft, 2016, 53(4): 914-921. doi: 10.2514/1.C033339 [27] MAQSOOD A, GO T H. Optimization of hover-to-cruise transition maneuver using variable-incidence wing[J]. Journal of Aircraft, 2010, 47(3): 1060-1064. doi: 10.2514/1.44453 [28] NALDI R, MARCONI L. Optimal transition maneuvers for a class of V/STOL aircraft[J]. Automatica, 2011, 47(5): 870-879. doi: 10.1016/j.automatica.2011.01.027 -

 下载:
下载:







 点击查看大图
点击查看大图
计量
- 文章访问数: 593
- HTML全文浏览量: 100
- PDF下载量: 49
- 被引次数: 0
