



Overall and energy efficiency optimization for communication-oriented morphing solar-powered UAV
-
摘要:
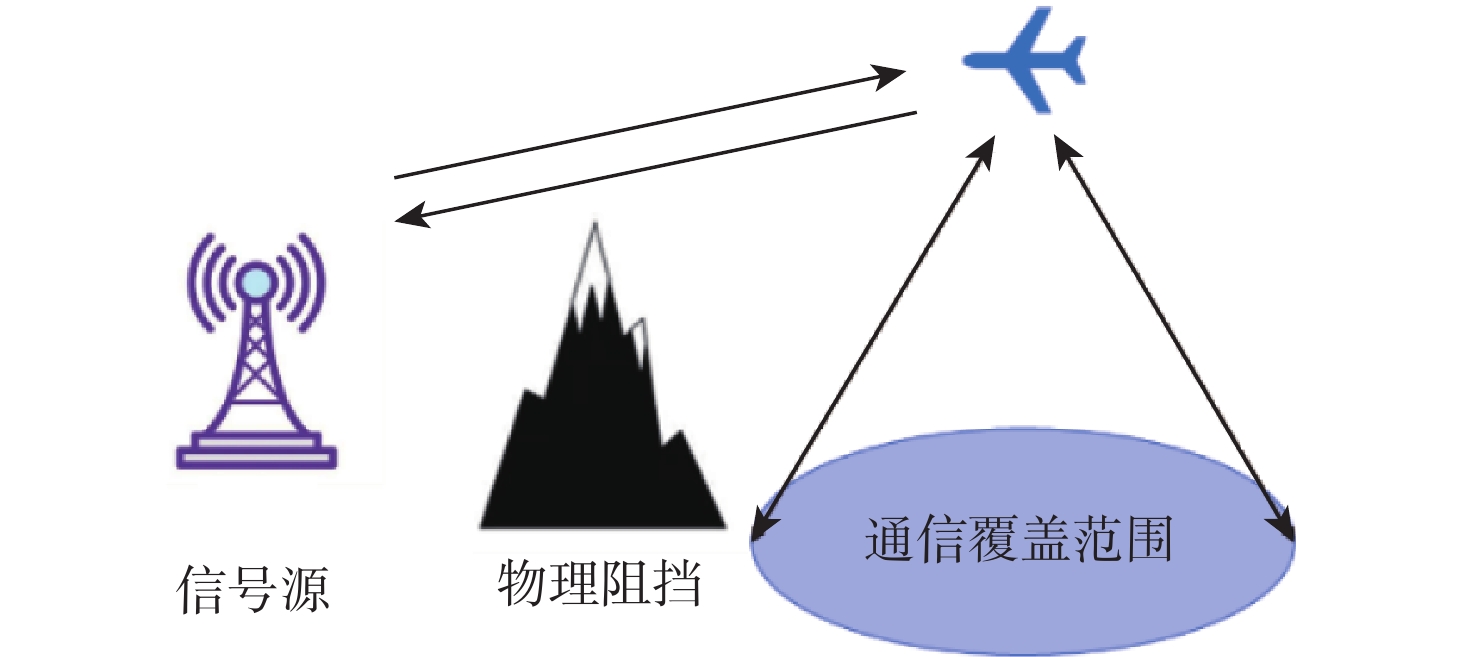
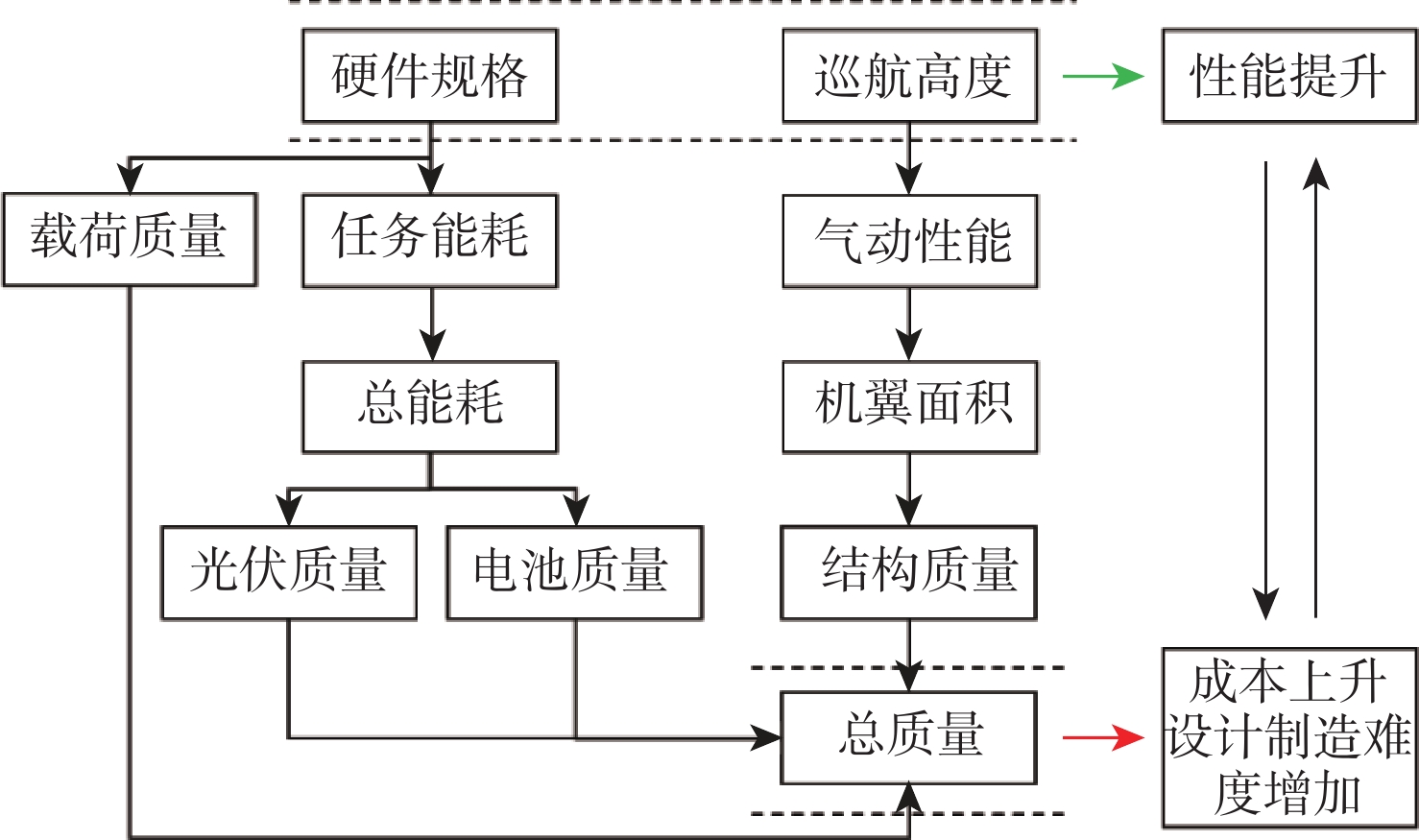
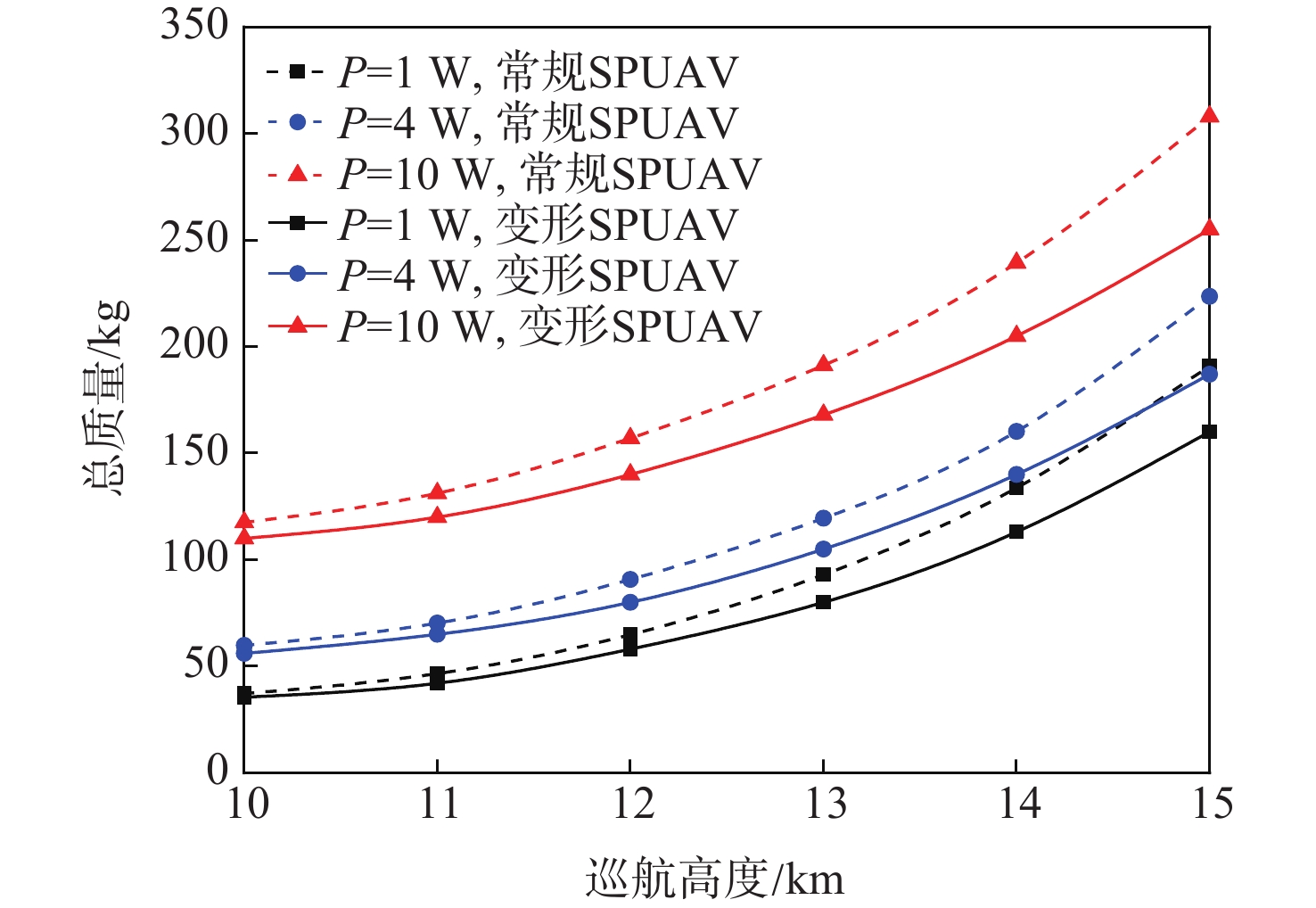
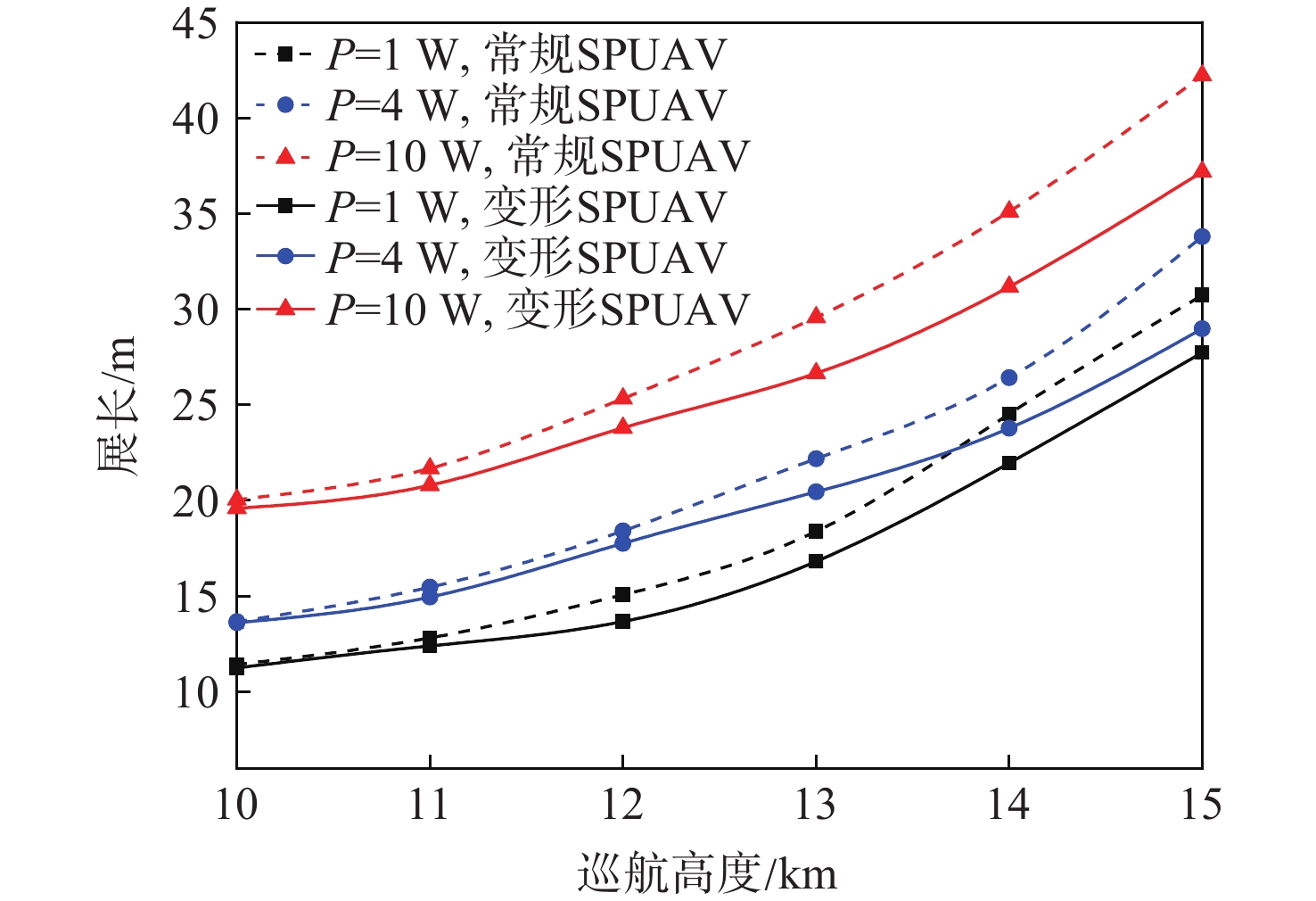
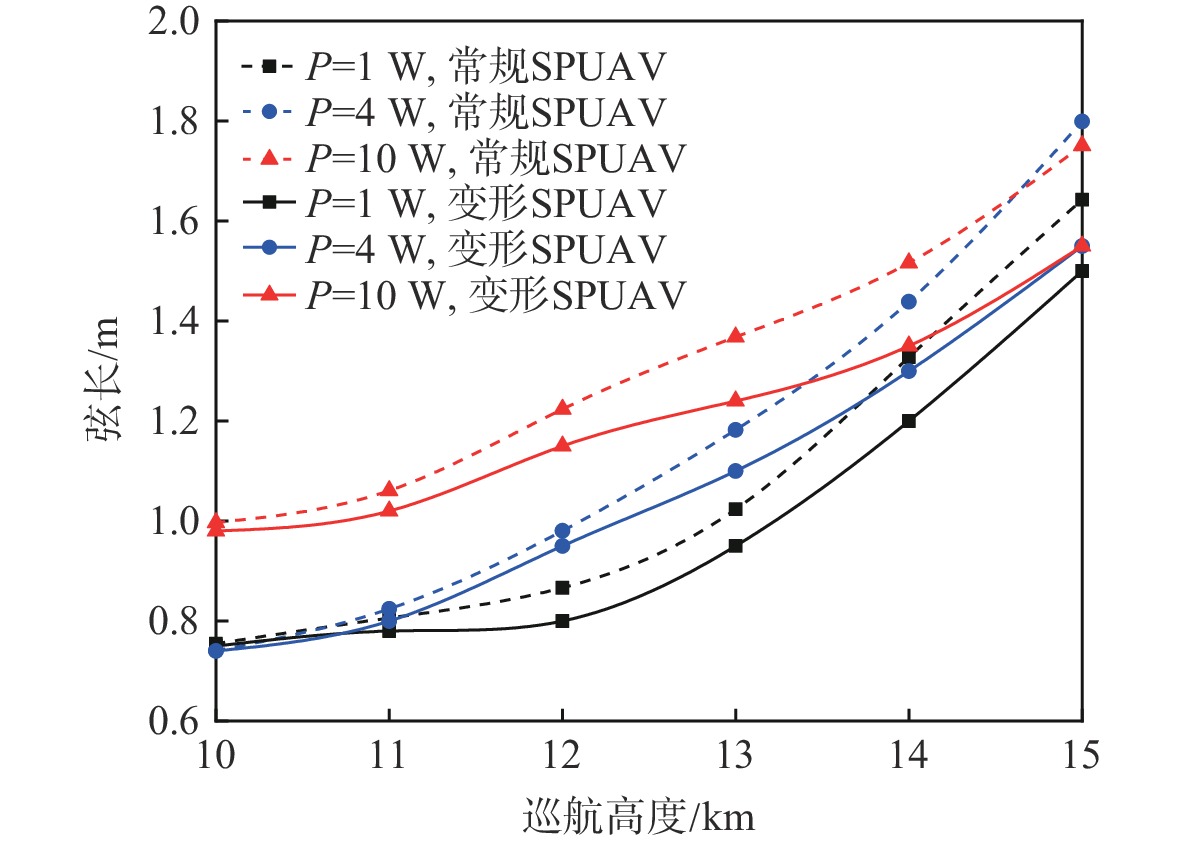
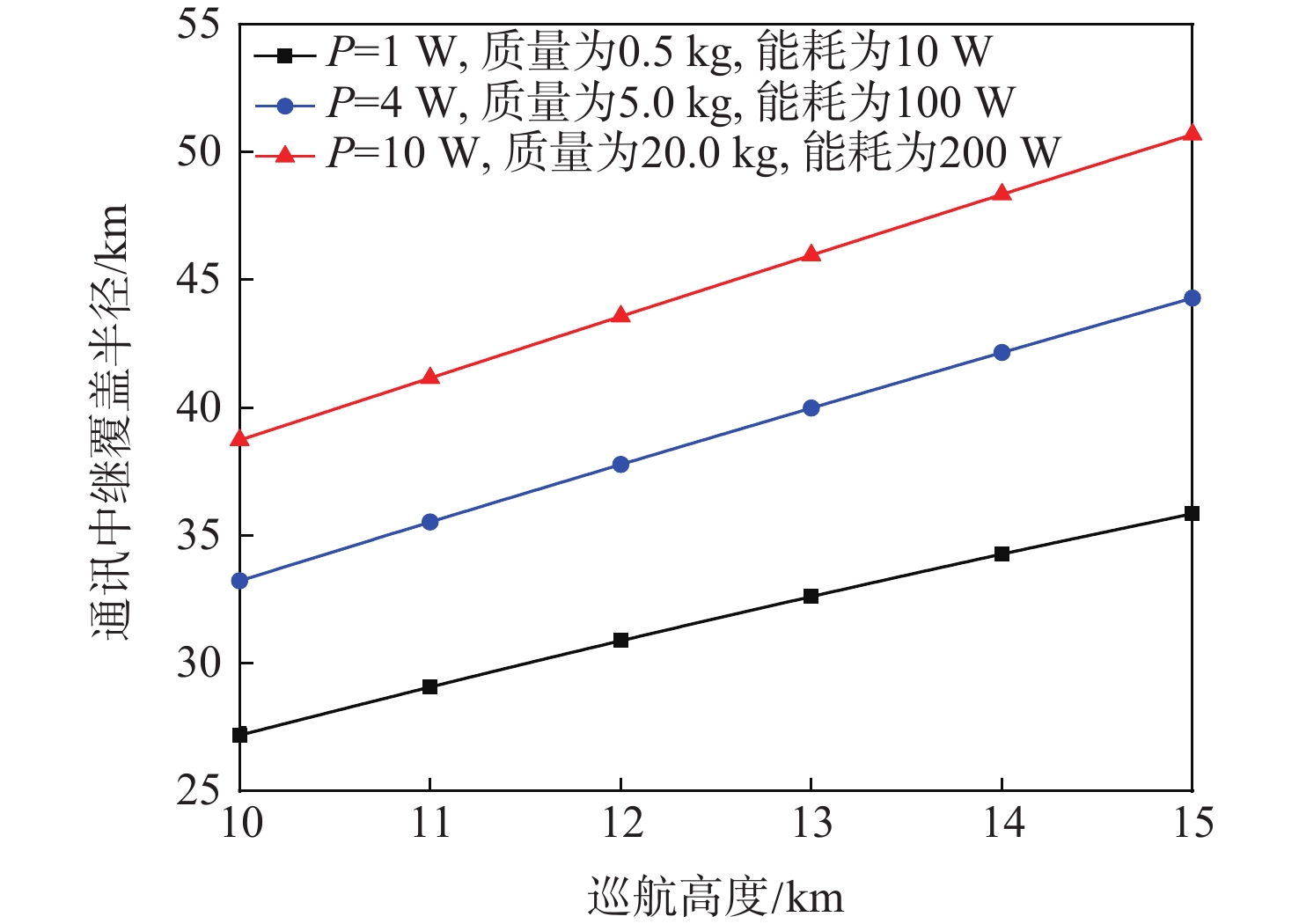
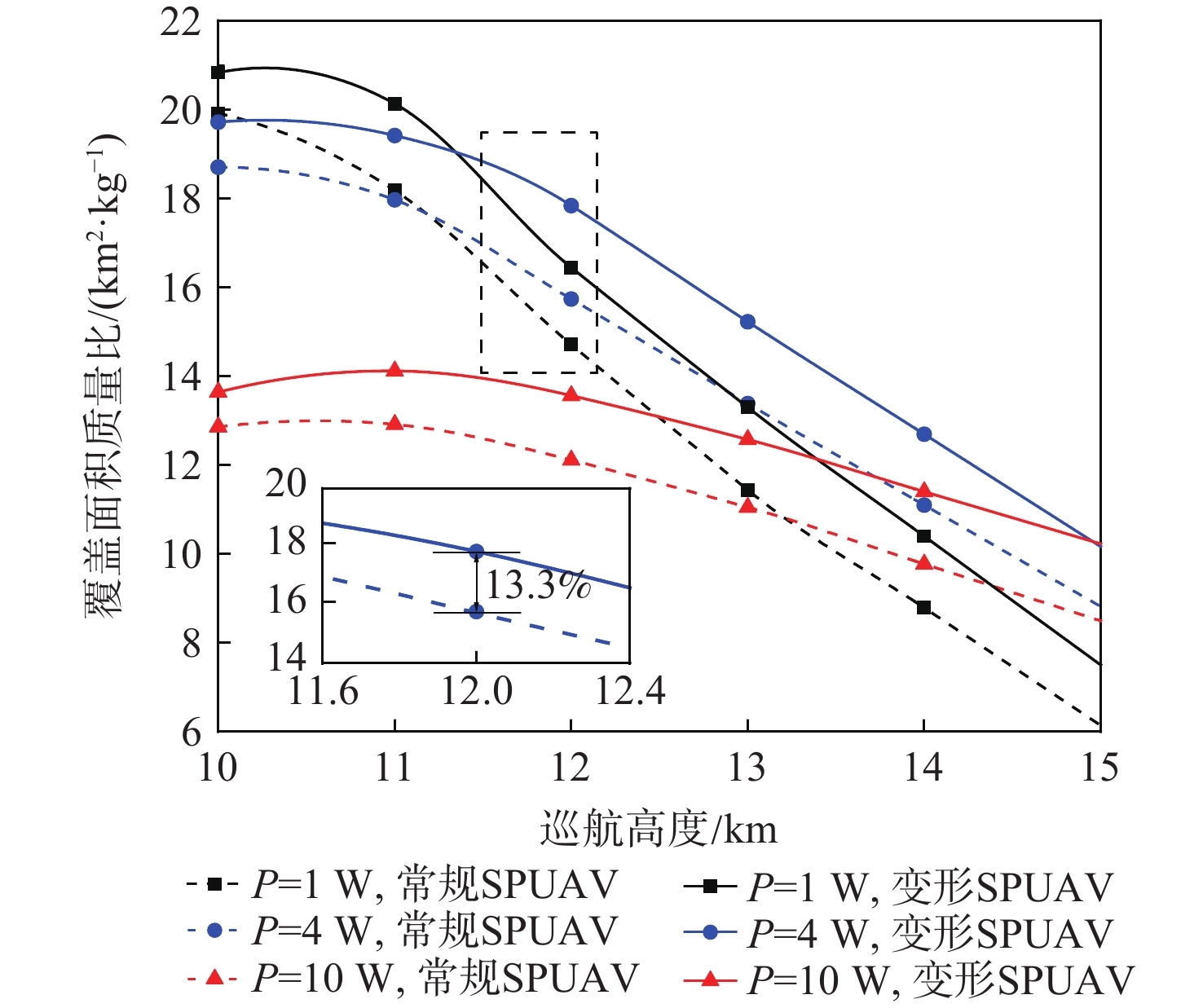
高空太阳能无人机(SPUAV)平台在充当空中基站增强、补盲偏远地区、灾害应急、远程中继通信方面具有其他平台难以比拟的优势,但太阳能无人机设计域狭窄,需要综合考虑载荷约束和无人机平台特点耦合设计。重点考虑通信任务与平台能量的双重约束,设计一种构型可变的太阳能无人机平台,研究其总体方案设计与优化,使太阳能无人机在满足24 h能量闭合前提下能够最大化覆盖通信范围。通过建立通信、太阳辐照、质量预测等模型,设置能量平衡约束与通信约束条件,建模优化问题,进而设计启发式算法的全局优化框架。仿真分析结果表明:可变构型下的总体方案与常规构型相比能够显著减少总质量,特别是在高空重载的状况下能够提高整体方案的效用,仿真条件下总质量节约13.3%;通信载荷规格的提高及巡航高度的增加能够增加中继通信覆盖范围,但是需要以平台总质量增加作为代价;硬件设计方案一定时,选定低巡航高度可以使通信覆盖效费比更高。
Abstract:The high-altitude solar-powered unmanned aerial vehicle (SPUAV) offers incomparable advantages compared to other platforms, especially in enhancing aerial base stations, extending coverage to remote regions, supporting disaster response, and providing relay communication. However, the design feasible zones of SPUAVs are limited, requiring a coupling design of payload constraints and overall UAV characteristics. Focusing on the dual constraints of communication mission and UAV platform energy, this paper designed a morphing SPUAV, studying its overall design and optimization. Under the requirement of 24-hour energy closure while ensuring the mission’s effectiveness, the communication relay coverage was maximized. By establishing models for communication, solar irradiation, and mass prediction, setting energy balance constraints and communication constraints, and modeling optimization problems, the paper proposed a global optimization framework using a heuristic algorithm. The simulation results indicate that compared with the conventional configuration, the morphing SPUAV can significantly reduce total weight, especially under conditions of high altitude and heavy load, improving the overall effectiveness of the solution. Under simulation conditions, the total weight showed a 13.3% deduction. The improvement of communication payload specifications and the increase of cruise altitude can increase the coverage of relay communication but at the expense of increased total weight. When the communication payload is fixed, a low cruising altitude can improve the efficiency-to-cost ratio of communication coverage.
-
Key words:
- solar-powered UAV /
- relay communication /
- overall design /
- energy efficiency /
- heuristic algorithm
-

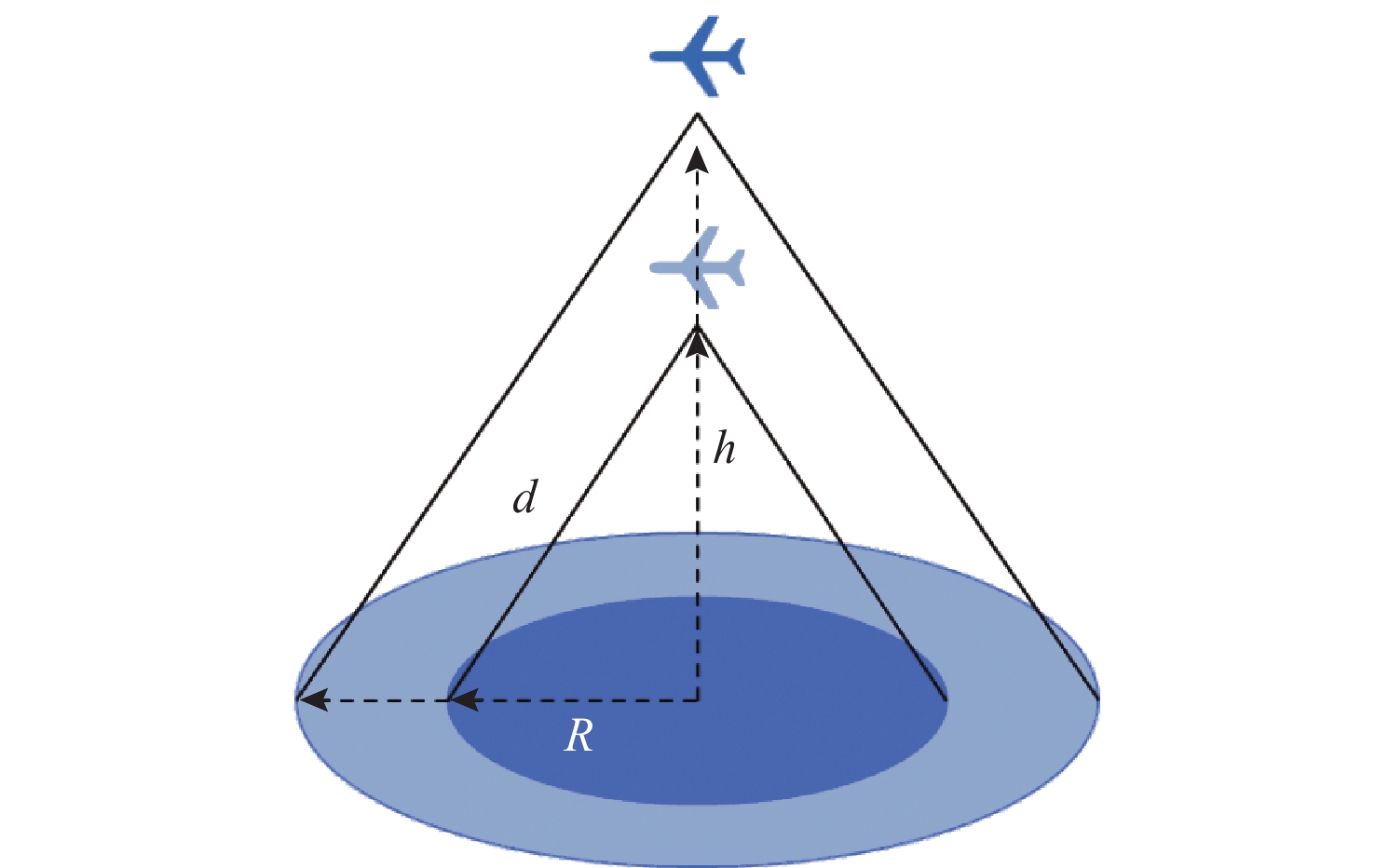
图 7 通信中继任务与平台设计的矛盾
Figure 7. Contradiction between communication relay task and platform design

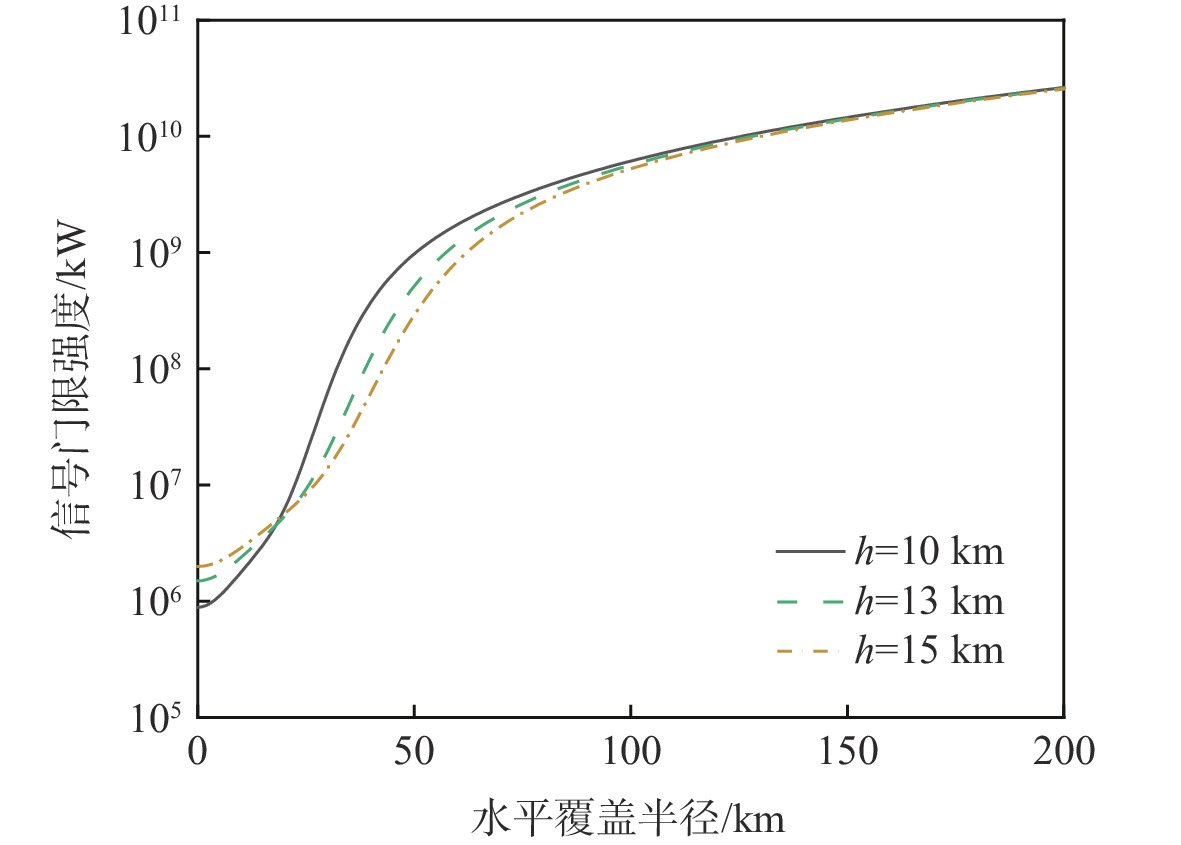
图 12 不同巡航高度下覆盖半径与所需信号强度
Figure 12. Relationship between coverage radius and required signal strength under varying altitudes
表 1 机载通信设备参数
Table 1. Parameters of airborne communication equipment
通信设备质量/kg 功耗/W 发射功率/W 0.5 12 1 5 100 4 20 200 10  下载: 导出CSV
下载: 导出CSV
表 2 分系统设计参数
Table 2. Design parameters of sub-systems
参数 取值 ksc/(kg·m−2) 0.4 kba/(Wh·kg−1) 300 kmp/(kg·kW−1) 8 kpr/(kg·kW−1) 0.42 ηsc 0.3 ηmp 0.97 ηpr 0.85 ηch 0.95 ηdc 0.95
下载: 导出CSV
表 3 太阳能无人机设计指标
Table 3. Design indicators of SPUAV
飞行日期 纬度/(°) 飞行高度/km 03-22—09-22 30 10~15
下载: 导出CSV
表 4 优化算法组变量选取空间
Table 4. Ranges of variables for algorithm optimization
b/m c/m [5,80] [0.5,3]
下载: 导出CSV
-
[1] ZHU X F, GUO Z, HOU Z X. Solar-powered airplanes: a historical perspective and future challenges[J]. Progress in Aerospace Sciences, 2014, 71: 36-53. doi: 10.1016/j.paerosci.2014.06.003 [2] 马东立, 张良, 杨穆清, 等. 超长航时太阳能无人机关键技术综述综述[J]. 航空学报, 2020, 41(3): 623418.MA D L, ZHANG L, YANG M Q, et al. Review of key technologies of ultra-endurance solar powered unmanned aerial vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(3): 623418(in Chinese) . [3] MERWADAY A, TUNCER A, KUMBHAR A, et al. Improved throughput coverage in natural disasters: unmanned aerial base stations for public-safety communications[J]. IEEE Vehicular Technology Magazine, 2016, 11(4): 53-60. doi: 10.1109/MVT.2016.2589970 [4] HAYAT S, YANMAZ E, MUZAFFAR R. Survey on unmanned aerial vehicle networks for civil applications: a communications viewpoint[J]. IEEE Communications Surveys & Tutorials, 2016, 18(4): 2624-2661. [5] BELLEMARE M G, CANDIDO S, CASTRO P S, et al. Autonomous navigation of stratospheric balloons using reinforcement learning[J]. Nature, 2020, 588(7836): 77-82. doi: 10.1038/s41586-020-2939-8 [6] YOUNGBLOOD J, TALAY T. Solar-powered airplane design for long-endurance, high-altitude flight[C]//Proceedings of the 2nd International Very Large Vehicles Conference. Reston: AIAA, 1982. [7] NOTH A. Design of solar powered airplanes for continuous flight[D]. Zurich: ETH Zurich, 2008. [8] GAO X Z, HOU Z X, GUO Z, et al. Joint optimization of battery mass and flight trajectory for high-altitude solar-powered aircraft[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2014, 228(13): 2439-2451. doi: 10.1177/0954410013518510 [9] 朱雄峰. 基于广义能量的太阳能飞行器总体设计研究[D]. 长沙: 国防科学技术大学, 2014.ZHU X F. Research on overall design of solar vehicle based on generalized energy[D]. Changsha: National University of Defense Technology, 2014(in Chinese). [10] WU M J, XIAO T H, ANG H S, et al. Investigation of a morphing wing solar-powered unmanned aircraft with enlarged flight latitude[J]. Journal of Aircraft, 2017, 54(5): 1996-2004. doi: 10.2514/1.C034356 [11] WU M J, XIAO T H, ANG H S, et al. Optimal flight planning for a Z-shaped morphing-wing solar-powered unmanned aerial vehicle[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(2): 497-505. doi: 10.2514/1.G003000 [12] WU M J, SHI Z W, ANG H S, et al. Theoretical study on energy performance of a stratospheric solar aircraft with optimum Λ-shaped rotatable wing[J]. Aerospace Science and Technology, 2020, 98: 105670. doi: 10.1016/j.ast.2019.105670 [13] 安朝, 谢长川, 孟杨, 等. 多体组合式无人机飞行力学稳定性分析及增稳控制研究[J]. 工程力学, 2021, 38(11): 248-256. doi: 10.6052/j.issn.1000-4750.2020.11.0820AN C, XIE C C, MENG Y, et al. Flight dynamics and stable control analyses of multi-body aircraft[J]. Engineering Mechanics, 2021, 38(11): 248-256(in Chinese). doi: 10.6052/j.issn.1000-4750.2020.11.0820 [14] 刘东旭, 谢长川, 洪冠新. 翼尖铰接复合飞行器动力学特性研究[J]. 北京亚洲成人在线一二三四五六区学报, 2021, 47(11): 2311-2321.LIU D X, XIE C C, HONG G X. Dynamic characteristics of wingtip-jointed composite aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(11): 2311-2321(in Chinese). [15] 周伟, 马培洋, 周睿孙, 等. 基于PID原理的双机链翼无人机姿态控制[C]//无人系统高峰论坛(USS 2021)论文集. 北京: 无人系统技术, 2021: 6-12.ZHOU W, MA P Y, ZHOU R S, et al. Attitude control of two chained wing UAVs based on PID principle[C]//Proceedings of the USS 2021. Beijing: Unmanned Systems Technology, 2021: 6-12(in Chinese) . [16] 周伟, 马培洋, 郭正, 等. 基于翼尖链翼的组合固定翼无人机研究进展[J]. 航空学报, 2022, 43(9): 325946.ZHOU W, MA P Y, GUO Z, et al. Research progress of combined fixed-wing unmanned aerial vehicle based on wingtip chained[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(9): 325946(in Chinese). [17] 吴高峰, 高晓光, 符小卫. 一种基于多无人机的中继节点布置问题建模与优化方法[J]. 航空学报, 2017, 38(11): 321195. doi: 10.7527/S1000-6893.2017.321195WU G F, GAO X G, FU X W. Modeling and optimization method of relay node placement using multi-UAV[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(11): 321195(in Chinese). doi: 10.7527/S1000-6893.2017.321195 [18] 吴钟博, 易建强. 无人机编队支撑网络的协同通信中继策略[J]. 航空学报, 2020, 41(S2): 724319.WU Z B, YI J Q. Cooperative communication relay strategy of UAV formation support network[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 724319(in Chinese). [19] 刘海涛, 顾新宇, 方晓钰, 等. 频率选择性衰落信道DS-CDMA无人机中继通信系统航迹规划[J]. 航空学报, 2019, 40(7): 322633.LIU H T, GU X Y, FANG X Y, et al. Path panning for UAV relay communication systems with DS-CDMA over frequency selective fading channel[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(7): 322633(in Chinese). [20] 张小孟, 杨森, 宋晓, 等. 一种中继无人机快速部署策略[J]. 北京亚洲成人在线一二三四五六区学报, 2021, 47(8): 1705-1711.ZHANG X M, YANG S, SONG X, et al. A rapid deployment strategy of relay unmanned aerial vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1705-1711(in Chinese). [21] ZENG Y, ZHANG R, LIM T J. Wireless communications with unmanned aerial vehicles: opportunities and challenges[J]. IEEE Communications Magazine, 2016, 54(5): 36-42. doi: 10.1109/MCOM.2016.7470933 [22] SUN Y, XU D F, NG D W K, et al. Optimal 3D-trajectory design and resource allocation for solar-powered UAV communication systems[J]. IEEE Transactions on Communications, 2019, 67(6): 4281-4298. doi: 10.1109/TCOMM.2019.2900630 [23] YUAN Z W, YANG Y P, HU Y P, et al. Channel-aware potential field trajectory planning for solar-powered relay UAV in near-space[J]. IEEE Access, 2020, 8: 143950-143961. doi: 10.1109/ACCESS.2020.3013319 [24] 罗祎喆, 丁文锐, 雷耀麟, 等. 系留无人机平台搭载的蜂窝通信基站吞吐量优化[J]. 北京亚洲成人在线一二三四五六区学报, 2021, 47(6): 1161-1172.LUO Y Z, DING W R, LEI Y L, et al. Throughput optimization for cellular communication on tethered unmanned aerial vehicle base station[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(6): 1161-1172(in Chinese). [25] 李晓伟. 面向无人机的高能效长续航通信覆盖研究[D]. 北京: 北京工业大学, 2020.LI X W. Research on UAV-oriented communication coverage with high energy efficiency and long endurance[D]. Beijing: Beijing University of Technology, 2020(in Chinese). [26] WANG X Y, YANG Y P, WU D, et al. Mission-oriented 3D path planning for high-altitude long-endurance solar-powered UAVs with optimal energy management[J]. IEEE Access, 2020, 8: 227629-227641. doi: 10.1109/ACCESS.2020.3045934 [27] HARMATS M, WEIHS D. Hybrid-propulsion high-altitude long-endurance remotely piloted vehicle[J]. Journal of Aircraft, 1999, 36(2): 321-331. doi: 10.2514/2.2443 [28] LI X H, SUN K J, LI F. General optimal design of solar-powered unmanned aerial vehicle for priority considering propulsion system[J]. Chinese Journal of Aeronautics, 2020, 33(8): 2176-2188. doi: 10.1016/j.cja.2020.04.009 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 401
- HTML全文浏览量: 123
- PDF下载量: 15
- 被引次数: 0
