| Citation: | WU Q S,GUO J,KANG Z L,et al. Maritime mission assignment of UAV clusters based on γ random search strategy[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(12):3872-3883 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0882

|
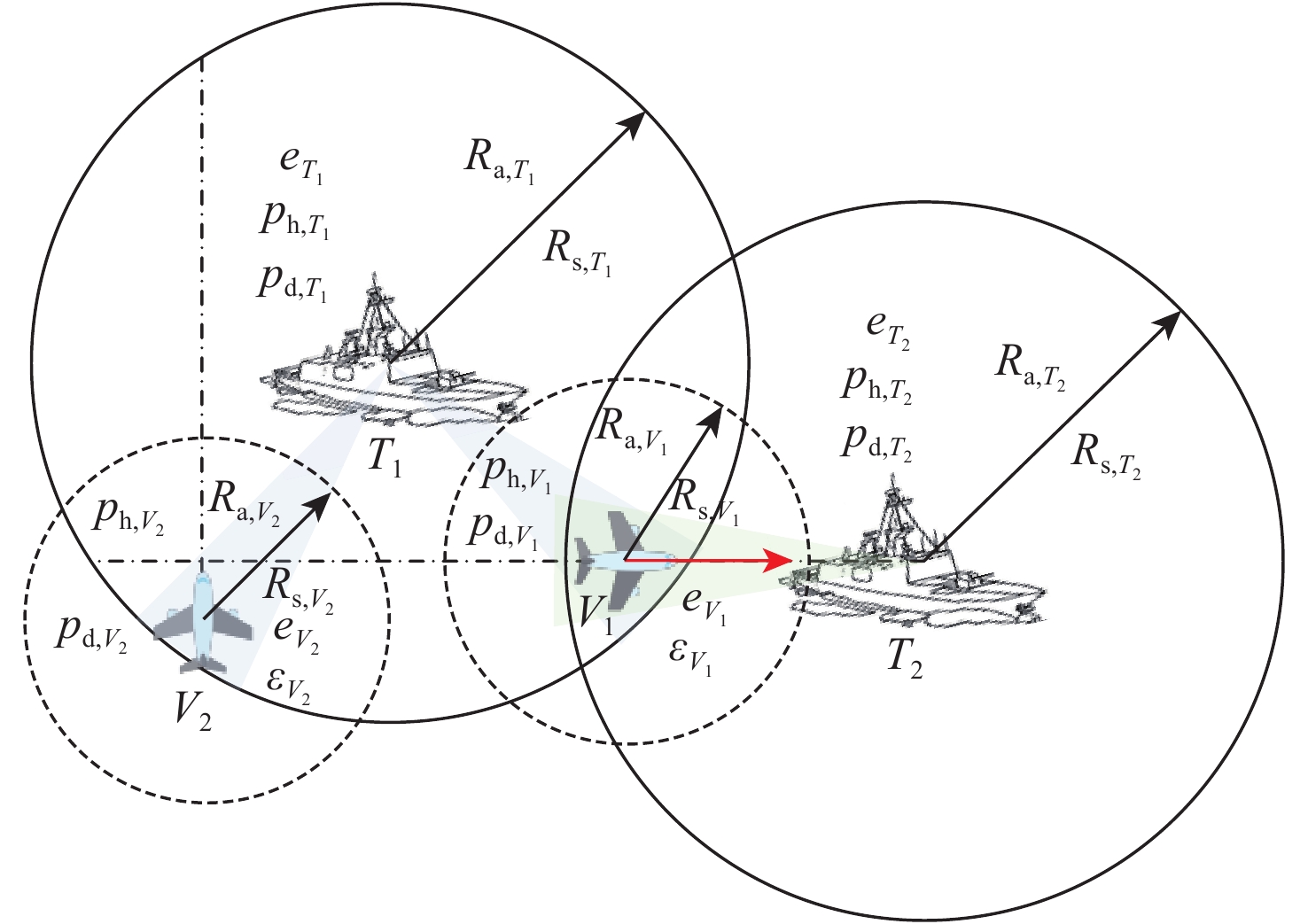
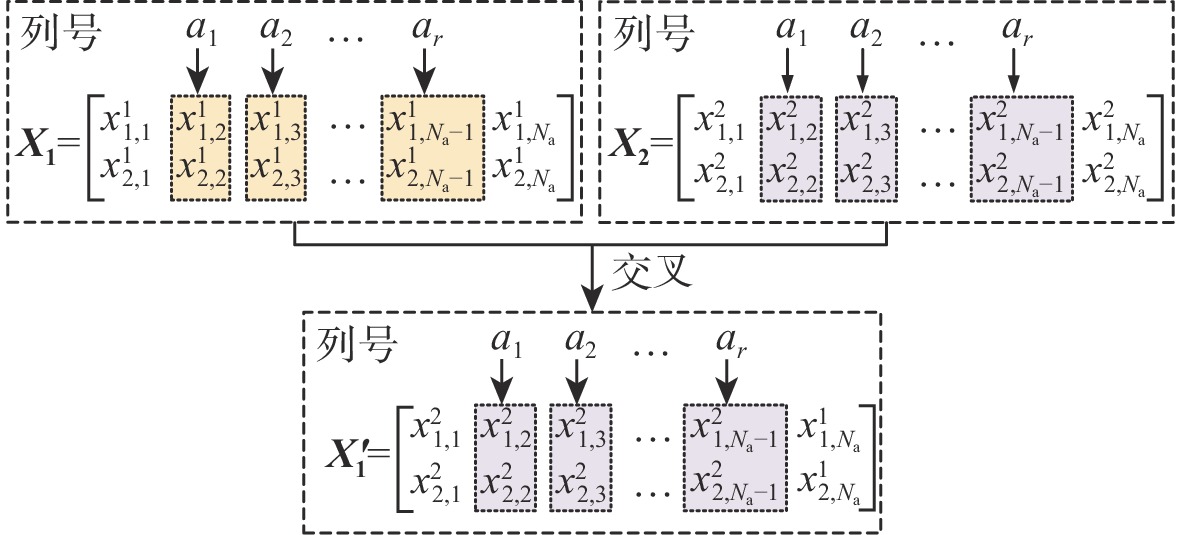
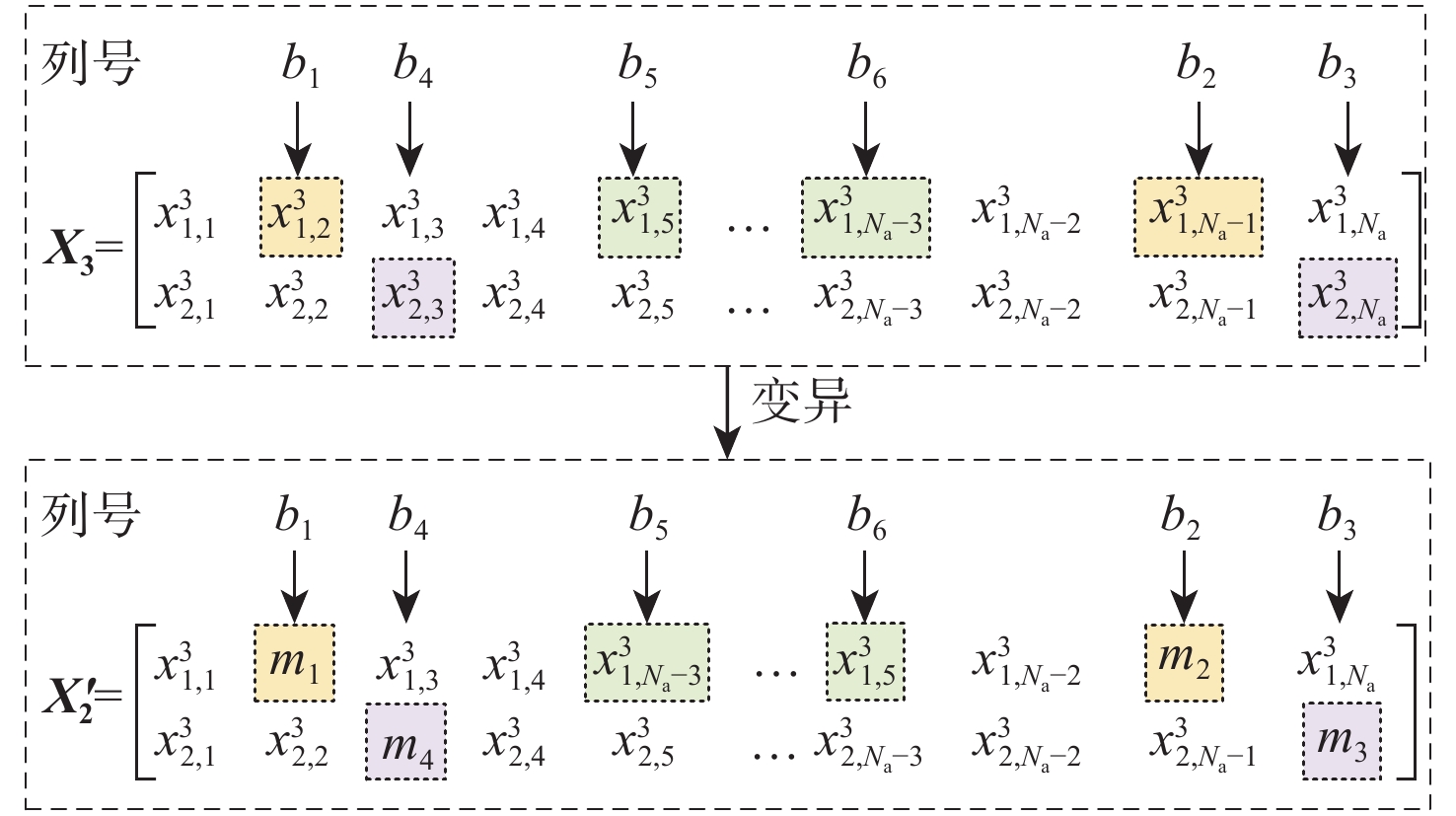
In view of the characteristics of complex maritime combat situations, diverse combat missions, and heterogeneous combat units of unmanned aerial vehicle (UAV) clusters, a multi-objective mission assignment optimization model for maritime UAV clusters was established, and an improved discrete particle swarm optimization algorithm based on $\gamma $ random search strategy (

| [1] |
谢伟, 陶浩, 龚俊斌, 等. 海上无人系统集群发展现状及关键技术研究进展[J]. 中国舰船研究, 2021, 16(1): 7-17.
XIE W, TAO H, GONG J B, et al. Research advances in the development status and key technology of unmanned marine vehicle swarm operation[J]. Chinese Journal of Ship Research, 2021, 16(1): 7-17(in Chinese).
|
| [2] |
刘丽, 武坦然, 邵东青. 美军空中无人作战概念解析[J]. 航天电子对抗, 2022, 38(1): 26-30. doi: 10.3969/j.issn.1673-2421.2022.01.006
LIU L, WU T R, SHAO D Q. Analysis of the combat concept of unmanned aerial system of the US armed forces[J]. Aerospace Electronic Warfare, 2022, 38(1): 26-30(in Chinese). doi: 10.3969/j.issn.1673-2421.2022.01.006
|
| [3] |
王宇, 郭兴旺. 无人系统集群海上作战应用研究[J]. 舰船电子工程, 2019, 39(12): 21-25.
WANG Y, GUO X W. Research on the application of unmanned system cluster in marine combat applications[J]. Ship Electronic Engineering, 2019, 39(12): 21-25(in Chinese).
|
| [4] |
吴子沉, 胡斌. 基于态势认知的无人机集群围捕方法[J]. 北京亚洲成人在线一二三四五六区学报, 2021, 47(2): 424-430.
WU Z C, HU B. Swarm rounding up method of UAV based on situation cognition[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 424-430(in Chinese).
|
| [5] |
李桂亮, 毕海洋, 洪雪健, 等. 基于DE-DPSO-GT-SA算法的协同多任务分配[J]. 北京亚洲成人在线一二三四五六区学报, 2021, 47(1): 90-96.
LI G L, BI H Y, HONG X J, et al. Cooperative multi-task assignment based on DE-DPSO-GT-SA algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(1): 90-96(in Chinese).
|
| [6] |
梁天骄, 陈晓明, 杨朝旭, 等. 舰载无人机滑行轨迹控制方法[J]. 北京亚洲成人在线一二三四五六区学报, 2021, 47(2): 289-296.
LIANG T J, CHEN X M, YANG Z X, et al. Trajectory control method for unmanned carrier aircraft taxiing[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 289-296(in Chinese).
|
| [7] |
张令, 段海滨, 雍婷, 等. 基于寒鸦配对交互行为的无人机集群编队控制[J]. 北京亚洲成人在线一二三四五六区学报, 2021, 47(2): 391-397.
ZHANG L, DUAN H B, YONG T, et al. Unmanned aerial vehicle swarm formation control based on paired interaction mechanism in jackdaws[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 391-397(in Chinese).
|
| [8] |
符小卫, 陈子浩. 多无人机协同探测快速目标的控制方法设计[J]. 系统工程与电子技术, 2021, 43(11): 3295-3304. doi: 10.12305/j.issn.1001-506X.2021.11.30
FU X W, CHEN Z H. Design of control method for multi-UAV cooperative detection of fast target[J]. Systems Engineering and Electronics, 2021, 43(11): 3295-3304(in Chinese). doi: 10.12305/j.issn.1001-506X.2021.11.30
|
| [9] |
郭继峰, 郑红星, 贾涛, 等. 异构无人系统协同作战关键技术综述[J]. 宇航学报, 2020, 41(6): 686-696. doi: 10.3873/j.issn.1000-1328.2020.06.006
GUO J F, ZHENG H X, JIA T, et al. Summary of key technologies for heterogeneous unmanned system cooperative operations[J]. Journal of Astronautics, 2020, 41(6): 686-696(in Chinese). doi: 10.3873/j.issn.1000-1328.2020.06.006
|
| [10] |
GAO S, WU J Z, AI J L. Multi-UAV reconnaissance task allocation for heterogeneous targets using grouping ant colony optimization algorithm[J]. Soft Computing, 2021, 25(10): 7155-7167. doi: 10.1007/s00500-021-05675-8
|
| [11] |
KIM J, OH H, YU B, et al. Optimal task assignment for UAV swarm operations in hostile environments[J]. International Journal of Aeronautical and Space Sciences, 2021, 22(2): 456-467. doi: 10.1007/s42405-020-00317-z
|
| [12] |
HUO L, ZHU J, WU G, et al. A novel simulated annealing based strategy for balanced UAV task assignment and path planning[J]. Sensors, 2020, 20(17): 4769. doi: 10.3390/s20174769
|
| [13] |
王然然, 魏文领, 杨铭超, 等. 考虑协同航路规划的多无人机任务分配[J]. 航空学报, 2020, 41(S2): 24-35. doi: 10.7527/S1000-6893.2020.24234
WANG R R, WEI W L, YANG M C, et al. Task allocation of multiple UAVs considering cooperative route planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 24-35(in Chinese). doi: 10.7527/S1000-6893.2020.24234
|
| [14] |
XU G T, LIU L, TENG L, et al. Cooperative multiple task assignment considering precedence constraints using multi-chromosome encoded genetic algorithm[C]//Proceedings of the 2018 AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2018: 1859.
|
| [15] |
马也, 范文慧, 常天庆. 基于智能算法的无人集群防御作战方案优化方法[J]. 兵工学报, 2022, 43(6): 1415-1425.
MA Y, FAN W H, CHANG T Q. Optimization method of unmanned swarm defensive combat scheme based on intelligent algorithm[J]. Acta Armamentarii, 2022, 43(6): 1415-1425(in Chinese).
|
| [16] |
CHEN Y B, YANG D, YU J Q. Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(6): 2853-2872. doi: 10.1109/TAES.2018.2831138
|
| [17] |
WANG Y, YANG R R, XU Y X, et al. Research on multi-agent task optimization and scheduling based on improved ant colony algorithm[J]. IOP Conference Series: Materials Science and Engineering, 2021, 1043(3): 032007. doi: 10.1088/1757-899X/1043/3/032007
|
| [18] |
SHI J Q, TAN L, LIAN X F, et al. A multi-unmanned aerial vehicle dynamic task assignment method based on bionic algorithms[J]. Computers and Electrical Engineering, 2022, 99(1): 107820.
|
| [19] |
ZHU Z X, TANG B W, YUAN J P. Multirobot task allocation based on an improved particle swarm optimization approach[J]. International Journal of Advanced Robotic Systems, 2017, 14(3): 1-22.
|
| [20] |
LI M C, LIU C B, LI K L, et al. Multi-task allocation with an optimized quantum particle swarm method[J]. Applied Soft Computing, 2020, 96(1): 106603.
|
| [21] |
YAN M, YUAN H M, XU J, et al. Task allocation and route planning of multiple UAVs in a marine environment based on an improved particle swarm optimization algorithm[J]. EURASIP Journal on Advances in Signal Processing, 2021, 2021: 94. doi: 10.1186/s13634-021-00804-9
|
| [22] |
梁国强, 康宇航, 邢志川, 等. 基于离散粒子群优化的无人机协同多任务分配[J]. 计算机仿真, 2018, 35(2): 22-28. doi: 10.3969/j.issn.1006-9348.2018.02.005
LIANG G Q, KANG Y H, XING Z C, et al. UAV cooperative multi-task assignment based on discrete particle swarm optimization algorithm[J]. Computer Simulation, 2018, 35(2): 22-28(in Chinese). doi: 10.3969/j.issn.1006-9348.2018.02.005
|
| [23] |
ZHANG J D, CHEN Y Y, TANG Y Q, et al. Cooperative task assignment for UAV based on SA-QCDPSO[C]//Proceedings of the 2020 IEEE 16th International Conference on Control &Automation. Piscataway: IEEE Press, 2020: 864-869.
|
| [24] |
何润林. 吸气式高超声速飞行器上升段轨迹优化与制导研究[D]. 北京: 清华大学, 2018: 24-27.
HE R L. Research on trajectory optimization and guidance of air-breathing hypersonic vehicle in ascending phase[D]. Beijing: Tsinghua University, 2018: 24-27(in Chinese).
|
| [25] |
XUE H. A quasi-reflection based SC-PSO for ship path planning with grounding avoidance[J]. Ocean Engineering, 2022, 247(1): 110772.
|
| [26] |
仝秋娟, 李萌, 赵岂. 基于分类思想的改进粒子群优化算法[J]. 现代电子技术, 2019, 42(19): 11-14.
TONG Q J, LI M, ZHAO Q. An improved particle swarm optimization algorithm based on classification[J]. Modern Electronics Technique, 2019, 42(19): 11-14(in Chinese).
|

Figures(11) / Tables(8)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: