| Citation: | FU H Q,WU S F,LIU M L,et al. Disturbance-observer based adaptive control for space inertial sensor[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2799-2806 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0734

|
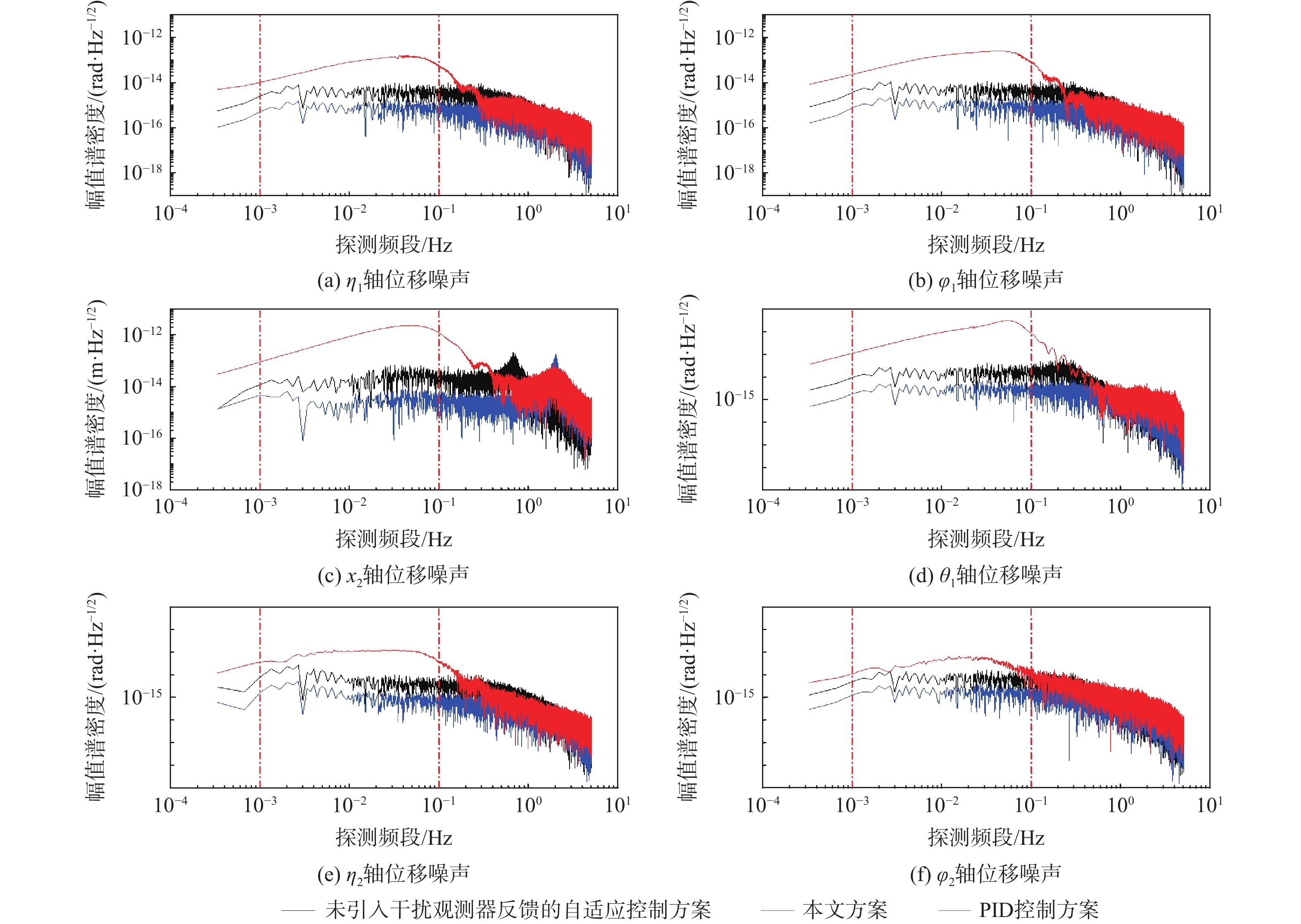
An adaptive control approach for space inertial sensors based on disturbance observers is proposed to address the issue of ultra-high precision control of inertial sensors inside spacecraft for gravitational wave detection. It will apply to the electrostatic suspension control loop for double test masses inside the detection spacecraft, and provide high-precision inertial reference for detection tasks. The design of closed-loop control is based on the observation feedback of the additional disturbance. The observer is designed to separately estimate the actuation noise and the non-actuation noise. The adaptive feedback controller is designed based on the back-stepping control framework. This will realize the closed-loop noise suppression and the nonlinear coupling approximation of the sensor voltage actuation.Each closed-loop signal's convergence is examined using the Lyapunov approach, and numerical simulation confirms the scheme's increased stability over the conventional scheme. In the detection frequency band, the closed-loop displacement noise level of non-sensitive axis reaches 10−15 m/s2/Hz1/2, the residual acceleration noise level reaches 10−14 m/s2/Hz1/2. Compared with the conventional state feedback control scheme, the noise suppression performance is improved by about 60%.

| [1] |
GATH P, FICHER W, KERSTEN M, et al. Drag free and attitude control system design for the LISA pathfinder mission[C]// Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2004: 5430.
|
| [2] |
MOBLEY F, FOUNTAIN G, SADILEK A, et al. Electromagnetic suspension for the tip-II satellite[J]. IEEE Transactions on Magnetics, 1975, 11(6): 1712-1716. doi: 10.1109/TMAG.1975.1058972
|
| [3] |
罗俊, 艾凌皓, 艾艳丽, 等. 天琴计划简介[J]. 中山大学学报(自然科学版), 2021, 60(S1): 1-19. doi: 10.13471/j.cnki.acta.snus.2020.12.23.2020B154
LUO J, AI L H, AI Y L, et al. A brief introduction to the Tianqin Project[J]. Acta Scientiarum Naturalium Universitatis Sunyatseni, 2021, 60(S1): 1-19(in Chinese). doi: 10.13471/j.cnki.acta.snus.2020.12.23.2020B154
|
| [4] |
FICHTER W, SCHLEICHER A, BENNANI S, et al. Closed loop performance and limitations of the LISA pathfinder drag-free control system[C]// Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit. Reston: AIAA, 2007: 6732.
|
| [5] |
LIAN X B, ZHANG J X, LU L, et al. Frequency separation control for drag-free satellite with frequency-domain constraints[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(6): 4085-4096. doi: 10.1109/TAES.2021.3088456
|
| [6] |
WU S F, FERTIN D. Spacecraft drag-free attitude control system design with Quantitative Feedback Theory[J]. Acta Astronautica, 2008, 62(12): 668-682. doi: 10.1016/j.actaastro.2008.01.038
|
| [7] |
FICHTER W, GATH P, VITALE S, et al. LISA Pathfinder drag-free control and system implications[J]. Classical and Quantum Gravity, 2005, 22(10): 139-148. doi: 10.1088/0264-9381/22/10/002
|
| [8] |
WU S F, GIULICCHI L, FENAL T, et al. Attitude stabilization of LISA pathfinder spacecraft using colloidal micro-newton thrusters[C]// Proceedings of the AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2010: 8198.
|
| [9] |
WU S F, GIULICCHI L, FENAL T, et al. Attitude control of LISA pathfinder spacecraft with micro-newton FEEP thrusters under multiple failures[C]// Proceedings of the AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2010: 8199.
|
| [10] |
GUO J X, TAO G, LIU Y. A multivariable MRAC scheme with application to a nonlinear aircraft model[J]. Automatica, 2011, 47(4): 804-812. doi: 10.1016/j.automatica.2011.01.069
|
| [11] |
LI B, HU Q L, YU Y B, et al. Observer-based fault-tolerant attitude control for rigid spacecraft[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(5): 2572-2582. doi: 10.1109/TAES.2017.2705318
|
| [12] |
ROY S B, BHASIN S, KAR I N. Combined MRAC for unknown MIMO LTI systems with parameter convergence[J]. IEEE Transactions on Automatic Control, 2018, 63(1): 283-290. doi: 10.1109/TAC.2017.2725955
|
| [13] |
MCNAMARA P, VITALE S, DANZMANN K. LISA pathfinder[J]. Classical and Quantum Gravity, 2008, 25(11): 114034.
|
| [14] |
SUN L, HUO W, JIAO Z X. Disturbance-observer-based robust relative pose control for spacecraft rendezvous and proximity operations under input saturation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(4): 1605-1617.
|
| [15] |
SUN L, HUO W, JIAO Z X. Robust nonlinear adaptive relative pose control for cooperative spacecraft during rendezvous and proximity operations[J]. IEEE Transactions on Control Systems Technology, 2017, 25(5): 1840-1847. doi: 10.1109/TCST.2016.2618907
|
| [16] |
YU X, LI P, ZHANG Y M. The design of fixed-time observer and finite-time fault-tolerant control for hypersonic gliding vehicles[J]. IEEE Transactions on Industrial Electronics, 2018, 65(5): 4135-4144. doi: 10.1109/TIE.2017.2772192
|
Figures(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad:
