| Citation: | CHEN Xiao, LIU Zhong, ZHANG Jianqiang, et al. Path following of underactuated USV based on modified integral line-of-sight guidance strategies[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3): 489-499. doi: 10.13700/j.bh.1001-5965.2017.0192(in Chinese)

|
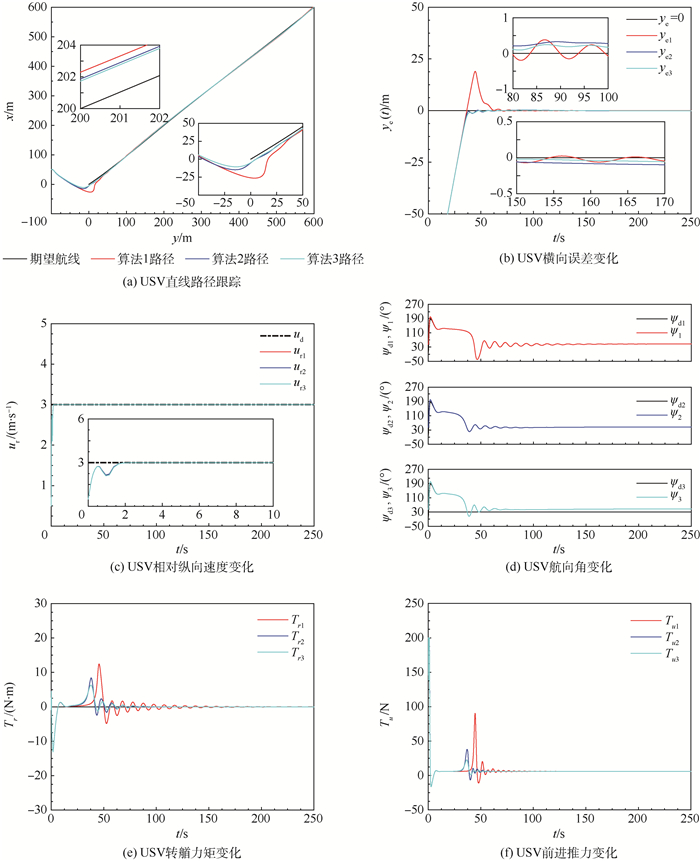
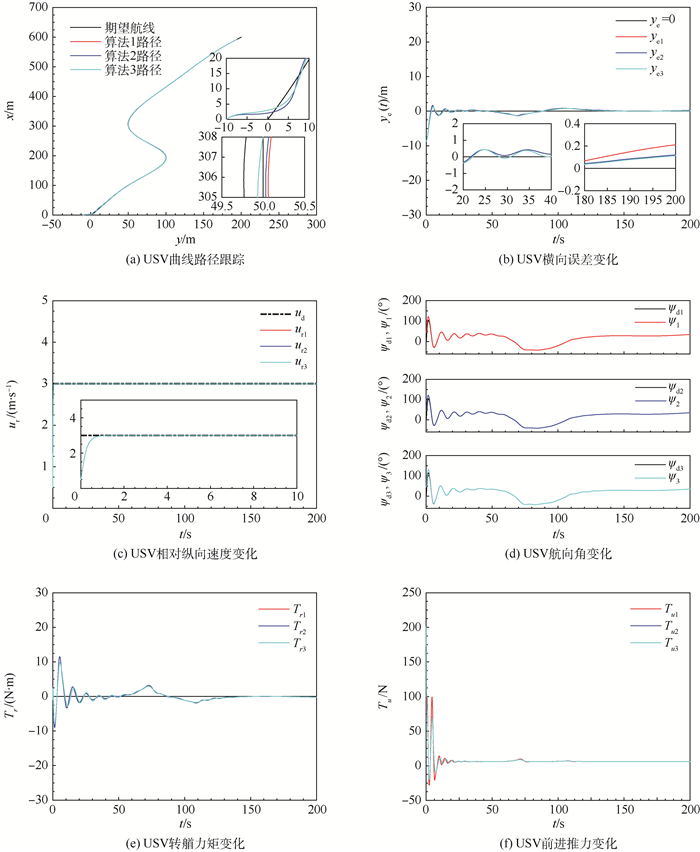
Path following control is one of the key technologies for unmanned surface vehicle (USV) to complete its mission, which is widely concerned by the field of motion control at home and abroad. In order to improve the accuracy and robustness of USV's path following control under the disturbance of the external environment such as wind, wave and flow, path following control problem of the asymmetry underactuated USV under external disturbances such as current is discussed, and two modified integral line-of-sight(ILOS) guidance strategies are proposed. Based on the modified guidance strategies and feedback control theory, path following of the USV at horizontal level is realized. Compared to the conventional ILOS guidance strategy, the first modified strategy with time-varying integral gain can avoid integral windup and overshoot phenomenon; on the basis of the first modified strategy, the lookahead distance is designed as a time-varying element in the second modified strategy, making the USV control more flexible. In the modified strategies, integral gain and lookahead distance are all computed as different functions of cross-track error, which can conduce the USV to converge to desired path in an elegant and fast manner. Based on the cascaded system theory, the control system proposed is proved to be global

| [1] |
张树凯, 刘正江, 张显库, 等.无人船艇的发展及展望[J].世界海运, 2015, 38(9):29-36.
ZHANG S K, LIU Z J, ZHANG X K, et al.The development and outlook of unmanned vessel[J]. World Shipping, 2015, 38(9):29-36(in Chinese).
|
| [2] |
薛春祥, 黄孝鹏, 朱咸军, 等.外军无人系统现状与发展趋势[J].雷达与对抗, 2016(36):1-5.
XUE C X, HUANG X P, ZHU X J, et al.Status quo and development trends of foreign military's unmanned systems[J]. Radar & ECM, 2016(36):1-5(in Chinese).
|
| [3] |
FOSSEN T I.Handbook of marine craft hydrodynamics and motion control[M]. Hudson County:John Wiley & Sons, 2011:60-89.
|
| [4] |
CAHARIJA W, PETTERSEN K Y, SØRENSEN A J, et al.Relative velocity control and integral LOS for path following of autonomous surface vessels:Merging intuition with theory[J]. Engineering for the Marine Environment, 2014, 228(2):180-191. doi: 10.1177/1475090213512293
|
| [5] |
田勇, 王丹, 彭周华, 等.无人水面艇直线航迹跟踪控制器的设计与验证[J].大连海事大学学报, 2015, 41(4):14-18.
TIAN Y, WANG D, PENG Z H, et al.Design and validation of path tracking controller for USV along straight-lines[J]. Journal of Dalian Maritime University, 2015, 41(4):14-18(in Chinese).
|
| [6] |
FOSSEN T I, LEKKAS A M.Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents[J]. International Journal of Adaptive Control and Signal Processing, 2015, 28(3):20-35. doi: 10.1002/acs.2550/citedby
|
| [7] |
BØRHAUG E, PAVLOV A, PETTERSEN K Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents[C]//Proceedings of the 47th IEEE Conference on Decision and Control. Piscataway, NJ: IEEE Press, 2008: 4984-4991.
|
| [8] |
WANG H, WANG D, PENG Z H.Adaptive neural control for cooperative path following of marine surface vehicles:State and output feedback[J]. International Journal of Systems Science, 2016, 47(2):343-359. doi: 10.1080/00207721.2015.1056274
|
| [9] |
FREDRIKSEN E, PETTERSEN K Y.Global-exponential waypoint maneuvering of ships:Theory and experiments[J]. Automatica, 2006, 42(4):677-687. doi: 10.1016/j.automatica.2005.12.020
|
| [10] |
FOSSEN T I, PETTERSEN K Y, GALEAZZI R.Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2):820-827. doi: 10.1109/TCST.2014.2338354
|
| [11] |
LEKKAS A M, FOSSEN T I.Integral LOS path following for curved paths based on a monotone cubic Hermite spline parametrization[J]. IEEE Transactions on Control Systems Technology, 2014, 22(6):2287-2301. doi: 10.1109/TCST.2014.2306774
|
| [12] |
ZHENG Z W, HUO W, WU Z.Direct-adaptive fuzzy path following control for an autonomous airship[J]. Control and Decision, 2014, 29(3):1418-1424.
|
| [13] |
WⅡG M S, PETTERSEN K Y, KROGSTAD T R.Uniform semiglobal exponential stability of integral line-of-sight guidance laws[J]. IFAC Papers Online, 2015, 48(16):61-68. doi: 10.1016/j.ifacol.2015.10.259
|
| [14] |
FOSSEN T I, PETTERSEN K Y.On uniform semiglobal exponential stability (USGES) of proportional line-of-sight guidance laws[J]. Automatica, 2014, 50(11):2912-2917. doi: 10.1016/j.automatica.2014.10.018
|
| [15] |
BREIVIK M. Nonlinear maneuvering control of underactuated ships[D]. Trondheim: Norwegian University of Science and Technology, 2003: 10-30.
|

Figures(3) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cqjj8.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: